一种适用于零件批量检测的尺寸批量测量方法
2020-11-03 11:36吴代思陈念年
计算机测量与控制 2020年10期
吴代思,范 勇,陈念年,巫 玲
(西南科技大学 计算机科学与技术学院, 四川 绵阳 621010)
0 引言
在工业零件加工制造领域,各零件产品均要求进行尺寸测量以检验是否满足加工要求。随着制造业加工技术与计算机技术的发展,工业零件的加工精度在不断提高的同时,加工对象也在不断变化,各加工厂对各类产品的尺寸测量精度、检测效率以及自动化程度要求越来越高,而传统的接触式尺寸测量方法一直存在着局限性[1]。目前各工厂对批量加工零件的检测普遍采用游标卡尺、千分尺等手工测量仪器进行传统的人工抽检方式[2],虽然手工测量仪器使用简单、便捷,但功能单一且既无法完成批量检测的任务,又不能满足一定程度的精度要求,甚至容易导致技术人员因长期工作造成视觉上的疲劳从而产生误检,难以达到高精度、高效率、自动化检测的标准。因此基于机器视觉的非接触式测量逐渐替代了传统的接触式测量,有效提高测量精度与检测效率[3],而且在最大程度上避免了人为误差,所以被广泛应用于工业零件加工质量的在线检测[4],其中最常见的应用是影像测量仪[5],主要用于检测高精密零件,测量精度普遍能达到±3 μm。
常用的影像测量仪虽已达到了测量精度高、效率快、可靠性强的程度,但无法实现批量自动化与智能化的测量,且存在设备价格高昂、程序高度定制化、操作流程复杂等缺点,会相应地影响批量检测的整体效率。对于像民用市场中常用的螺丝、二极管、五金件等加工制造零件,由于所需检测的种类和数量较大,所以工厂更倾向于一种能批量检测、低廉、简单、无需夹具、适用性强的尺寸批量测量系统。
为解决以上问题,本文设计研究一种识别率高、测量精度高、效率快、能兼容适应工业零件批量检测的尺寸批量测量方法。通过标准零件的注册,批量零件的图像采集与拼接、零件识别、待测量区域定位、边缘检测与最小二乘拟合、基于多线程的并行测量等一系列流程,最终实现同批次工业零件的尺寸批量测量。这种批量测量方法简单、高效、精确、适用性强,能满足工业批量检测的需求,有效解决工业实际问题。
1 系统总体方案设计
在工业应用场景中,往往工业零件的检测并不是数量上的逐一检测或内容的单一尺寸测量,更多的是针对同一批次零件的批量检测。本文结合图像拼接技术,通过运动控制平台自动对载物台(300 mm×200 mm)上放置的同一批次(≦100个)零件进行全景图像扫描拼接,获取超视场批量待测零件的拼接图像,再对拼接图像中的零件进行自动识别与模板加载、尺寸批量测量,最终对测量结果进行数据统计与质量分析,一次性有效地区分该批次待测零件产品中尺寸测量结果在预设定的公差范围(3.0 μm)内的合格产品与需重新加工的次品,从而实现同批次工业零件高效率的批量检测。同批次零件的质量检测流程如图1所示。
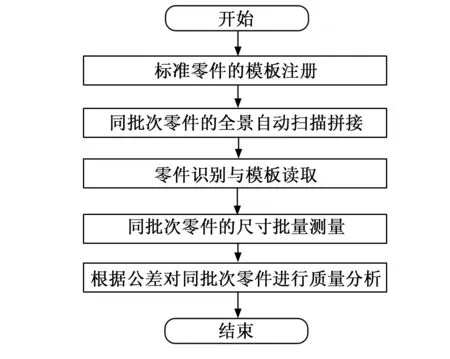
图1 同批次零件的质量检测流程图
2 尺寸批量测量方法的实现
实现拼接图像中所有零件的尺寸快速批量测量,最关键的技术是快速精确的图像配准算法和快速并行批量测量方案的设计。针对同批次零件的快速配准与尺寸批量测量,本文实现了一种尺寸快速并行批量测量方法,如图2所示。

图2 尺寸快速并行批量测量流程图
零件识别:主要包括图像的二值化、使用OTSU算法对零件区域进行阈值分割、圆形度计算等处理流程,自动识别出该批次零件在指定目录下标准零件图像的种类归属、测量内容、测量区域。
待测量区域定位:根据标准零件与拼接图像中各零件的亚像素边缘点集,利用基于单向Hausdorff距离的图像配准算法计算各零件的配准矩阵,通过配准矩阵对各零件中待测区域进行重定位。
边缘检测与最小二乘拟合:针对重定位后的待测量区域进行亚像素边缘检测,根据已知测量内容对亚像素边缘点集进行3 σ剔除毛刺与使用最小二乘法对测量元素(点、线、圆)进行拟合。
基于多线程的并行测量:对拟合出的测量元素(点、线、圆)按标准模板中预定的测量内容(距离、角度等),结合基于多线程的加速策略,完成各零件的尺寸并行测量。
2.1 零件识别
在零件类型识别之前,受工业零件的形状大小各异、数量较多等因素影响,所以本文限制了批量测量的对象必须为同一类型的工业零件。因此使用具有较好分割效果的OTSU法[6]对零件区域进行分割,再对其中一个零件进行类型识别即可完成零件识别工作,为下一步读取模板的测量内容与测量区域等信息提供基础。
由于大部分工业零件具有刚性不可形变的特点,并且本次背光采集的零件图像颜色特征无法提取,因此通过几何特征[7](面积S、周长c)和形状特征[8](几何参数法中的圆形度m)对常用的各类工业零件进行种类区分与识别。圆形度m:描述目标接近圆形的程度,计算公式如式(1)所示:
(1)
通过标准模板图像中的圆形度计算值与待测零件图像中的圆形度值进行对比分析,最为接近的属于同一类别的零件,且识别成功的前提是保证该类型标准零件已经被注册成为模板文件。不同类型零件的种类区分如图3所示。
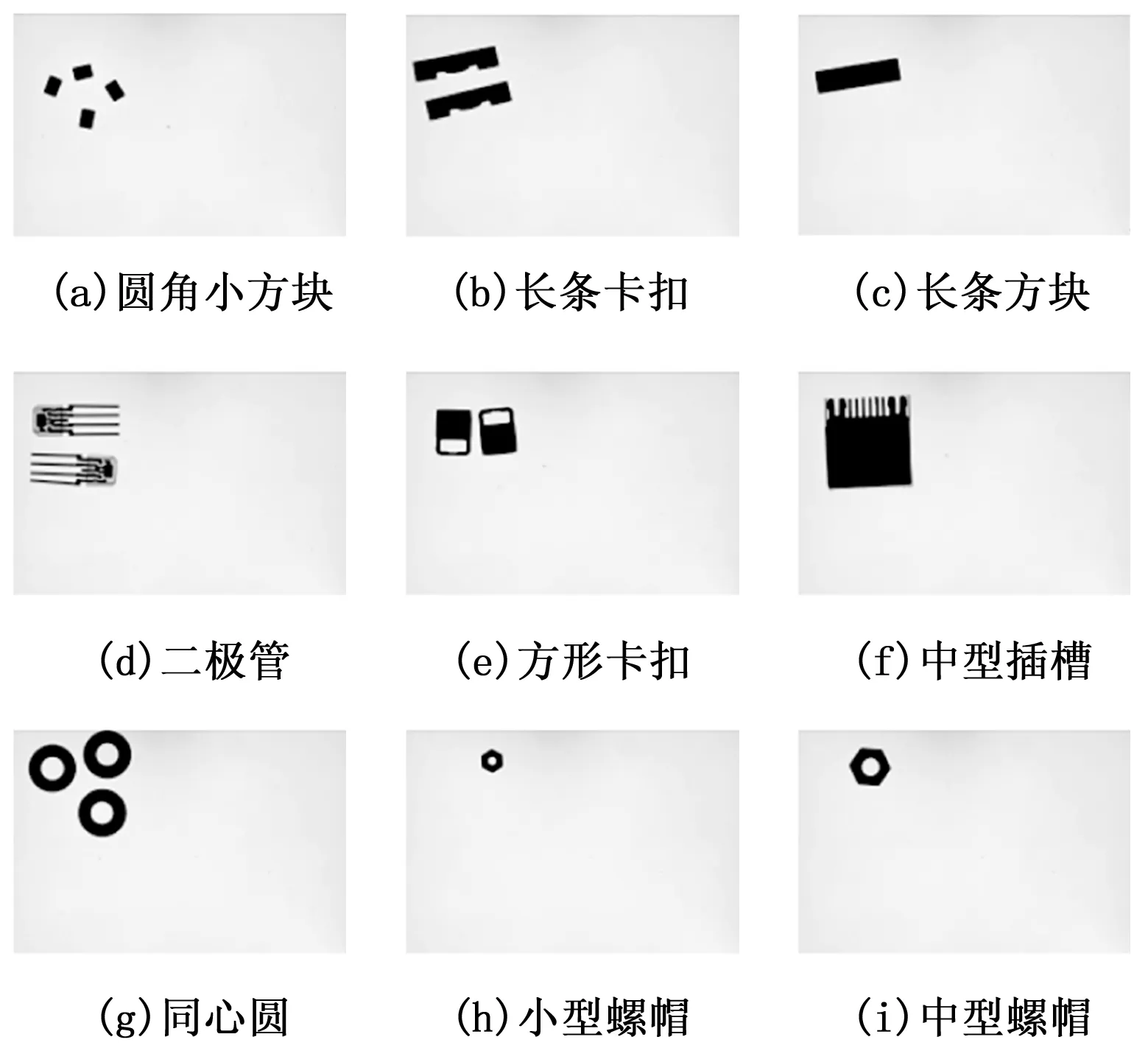
图3 不同类型零件的种类区分
2.2 待测量区域定位
在待测量区域定位过程中,最关键的技术还是图像配准,国内外对配准算法的研究众多[9],甚至将神经网络应用于图像配准领域[10]。由于大部分工业零件存在形状单一、全局或局部特征不易提取等问题,易造成配准效果出现较大误差,故本文使用基于单向Hausdorff距离的图像配准算法,利用零件的亚像素轮廓点集与形心[11]进行图像配准。
对标准零件图像与拼接图像进行滤波去噪二值化等处理,并应用基于空间矩的亚像素边缘检测算法获取零件图像的亚像素轮廓点集,则拼接图像中各零件的离散化形心坐标的计算公式如(2)与(3)所示:
(2)
(3)
根据相应的公式,可计算出零件图像之间的水平与垂直方向的偏移量(Δx,Δy),即零件图像配准的平移参数。
Δx=XC1-XC2
(4)
Δy=YC1-YC2
(5)
Hausdorff距离[12]是描述两个点集相似程度的一种有效度量,其表示两个点集的最不相似程度。本文通过预设16个旋转角度(360°内),迭代更新求取不同角度下的单个待配准零件图像与标准零件图像的边缘点集之间的Hausdorff距离,再通过不断细化角度,直至最小的Hausdorff距离符合配准距离阈值条件,则将该角度设置为配准的角度参数Δθ。配准算法流程如图4所示。

图4 基于Hausdorff距离的图像配准算法流程图
根据以上步骤可以计算出零件图像配准的旋转角度,再结合图像配准的平移参数与旋转角度,能将其组成一个“配准矩阵”。
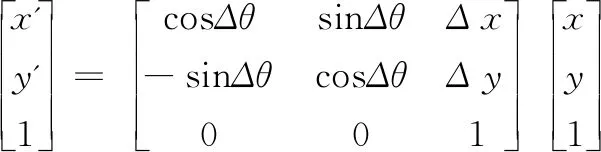
(6)
将标准零件图像的待测量区域坐标按该配准矩阵进行图像的仿射变换,则得到拼接图像中该单个待测零件图像的测量区域,同理也可得到其余零件图像的测量区域。
2.3 边缘检测与最小二乘拟合
为减少配准矩阵误差带来的测量区域偏移,导致尺寸测量出现误差,因此还需要对单个待测零件图像进行亚像素边缘检测。
亚像素边缘检测的基础是像素级边缘检测,但却不依靠灰度图像中的单一像素点,而是使用由邻域组成的一群具有特定灰度分布特性的像素点,结合检测目标的自身特性,找到检测目标与实际目标的特性最相似位置,使用浮点运算使得目标位置的像素精度高于整像素精度。
空间矩边缘定位法[13]是一种利用边缘灰度空间矩来进行边缘亚像素定位的算法,利用的是一维归一化阶跃边缘模型。其一维阶跃边缘的前三阶空间矩为:
(7)
(8)
(9)
由上述3个公式可推导出边缘位置l、背景灰度h和边缘对比度k的值分别为:
(10)
(11)
(12)
然后通过采样矩估计m0、m1、m2,最终将目标的边缘位置定位到亚像素位置l。
再对待测量区域的亚像素边缘点集使用3 σ准则剔除毛刺,然后通过最小二乘法对测量元素进行点集拟合(点、线、圆),为下一步的尺寸测量提供基础。
2.4 基于多线程的并行测量
在实际应用测量过程中,为实现各零件的高效、快速、独立测量,本文采用基于多线程[14]的并行测量方式,将同一批次零件的测量进程划分为多个独立的单线程,让他们同时运行、各自并行运行,从而大大缩短了同批次零件测量所需时间。当程序进入尺寸测量进程时,程序自动为每个零件的测量创建线程,并为每个线程分配固定的时间片段,该线程的时间片结束时则停止执行,而其他线程执行。由于时间片足够小,所以单从尺寸测量的主进程来看,不同零件的测量线程近似于并行工作。
3 实验结果及分析
本文所研究的是针对工业零件批量检测能实现尺寸批量测量的方法,同时能对同一批次的零件设定公差范围(3.0 μm),通过批量测量结果可以快速鉴别出同批次零件产品中符合尺寸要求的合格产品与次品。
3.1 尺寸批量测量结果与分析
在测试本文提出的尺寸批量测量方法的测量精度和重复度过程中,为避免系统误差和硬件上的误差对测量方法的精度和重复度计算造成偏差,本文选用了SolidWorks软件制作出高精度仿真实验图,图片大小与相机单次采集的图像大小相同均为5 472×3 648,且为达到真实仿真效果,还通过高斯平滑5×5处理得到模拟相机采集获得的灰度图,高精度仿真零件如图5所示。

图5 高精度仿真零件图
在实验过程中,为测试不同的角度与位移对尺寸测量结果的影响,实验分别将仿真小方块图和仿真圆形块图旋转0~20°(每次递增1°)与20~180°(每次递增5°),即52组数据来验证角度变换对测量精度的影响;水平位移从1~20像素(每次递增1像素)与20~100像素(每次递增10像素)和100到1 000像素(每次递增100像素),反方向相同,即74组数据验证水平位移变换对测量精度的影响;同理垂直方向也形成74组数据来验证垂直位移变换对测量精度的影响;对于任意角度及位移对测量结果精度的影响,随机选取了50组不同位移和角度进行实验。仿真零件测量结果如表1所示。
从表1中可以看出,本次仿真零件图像的测量精度误差不超过2.1 μm,重复性测量误差不超过0.8 μm,与常用
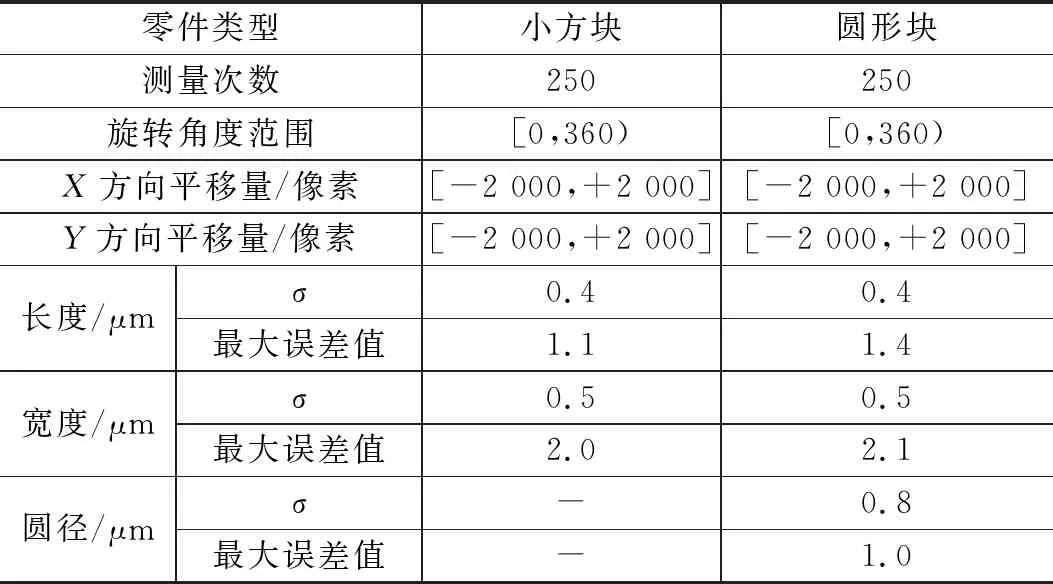
表1 仿真零件图像的测量结果
影像测量仪的测量精度相近,且能实现同批次工业零件的批量检测。
3.2 配准算法精度与效率分析
在上一节中,本文对仿真小方块零件图与仿真圆形块零件图的批量测量精度进行了分析,这一切都基于配准算法得到的配准矩阵。因此本次为验证配准算法的精度,抽取了仿真小方块零件图的十组测试数据进行配准算法的精度验证实验。
从表2可以看出,基于单向Hausdorff距离的图像配准算法的配准角度精度误差不超过0.190 7°,位移误差不超过1个像素。
从表3可以看出,在配准精度误差影响不大的前提下,经过多次对配准算法进行改进,目前配准算法在Windows10操作系统的Visual Studio2010编译器下,对图6中的100个圆角小方块(全景自动扫描拼接小方块图,图像大小为5 528×10 416像素)同时进行配准的耗时约为7 s,而其整个测量过程(包括配准与并行测量)的时间约为9 s,即快速并行测量时间约为2 s。
3.3 同批次零件的产品质量分析
待同批次零件尺寸批量测量后,为方便各工厂能对测量结果进行数据统计与质量分析,一次性有效的区分该批次零件产品中测量结果在公差范围(3.0 μm)内的合格产品与次品。本文对100个长度与宽度尺寸均检验合格的圆角

表2 仿真零件图像的配准结果

表3 配准算法耗时的改进
小方块(图6)进行尺寸批量测量与产品质量分析,验证系统的正确率。
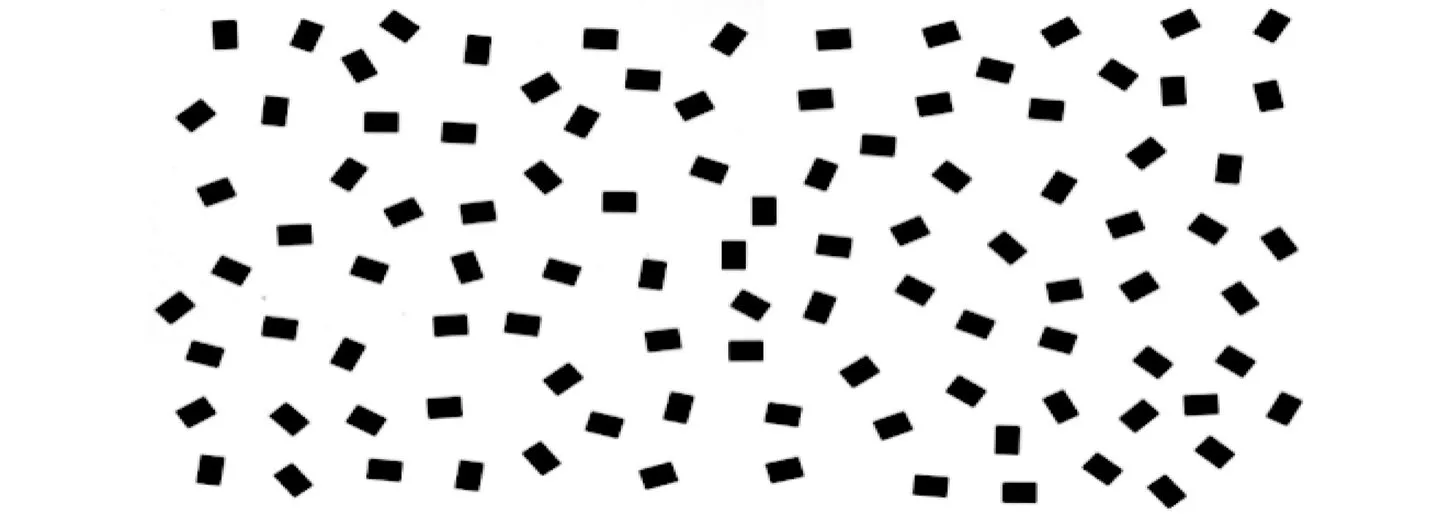
图6 全景自动扫描拼接的圆角小方块图
本次实验使用的标准零件模板对应的宽度测量结果为2.476 9 mm,长度测量结果为3.487 2 mm。本次批量测量的耗时为9 s,其尺寸批量测量结果如图7所示,质量分析结果如图8所示。经系统的质量分析,长度与宽度的批量测量结果均在预设的公差范围(3.0 μm)内,因此该批次的100个圆角小方块均被系统检测为合格类产品。
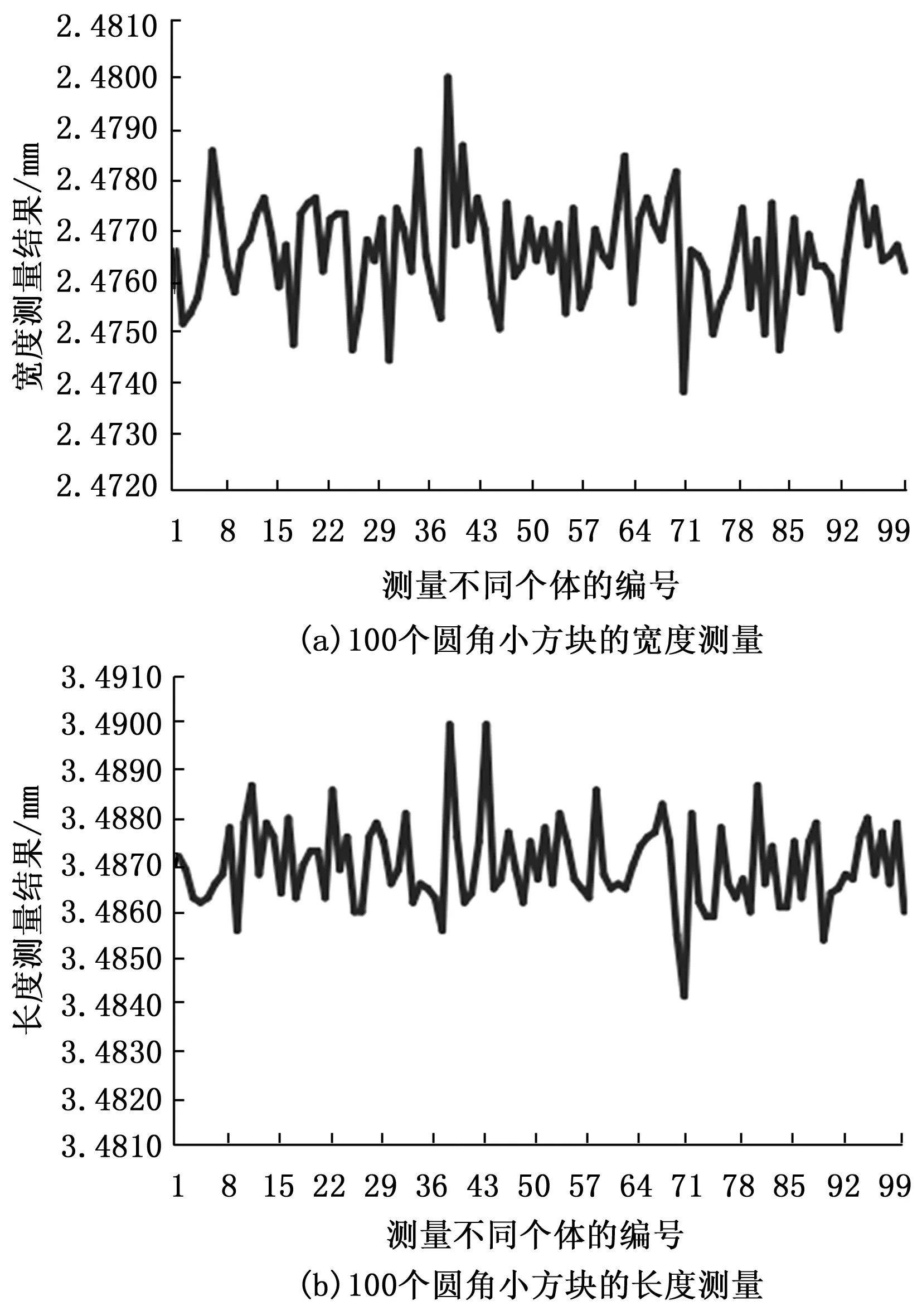
图7 100个圆角小方块(合格)的尺寸批量测量结果

图8 100个圆角小方块(合格)的质量分析结果
4 结束语
本文提出了一种适用于工业零件批量检测的尺寸批量测量方法。该方法的测量精度误差不超过2.1 μm,重复性测量误差不超过0.8 μm,与常用影像测量仪的测量精度相近,且能满足工业批量检测的需求,有效解决工业实际问题。目前该方法已成功应用于某科技有限公司的一键式测量仪中。下一步将考虑对同一批次零件中包含不同类型的零件测量与易形变零件的测量作进一步研究,因为这将是未来一键式测量仪的发展趋势。
猜你喜欢
China’s foreign Trade(2021年6期)2021-12-26
云南画报(2021年6期)2021-07-28
科学家(2021年24期)2021-04-25
电脑爱好者(2020年5期)2020-05-11
通信产业报(2016年44期)2017-03-13
中华奇石(2015年7期)2015-07-09
中华奇石(2015年5期)2015-07-09
祝你幸福·午后版(2008年4期)2008-03-22
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13