矿用窄型无轨车辆液压转向系统研究*
2020-11-02 10:04陈利东
煤矿机电 2020年5期
陈利东
(中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006)
0 引言
目前煤矿井下无轨车辆的车身宽度普遍在2 m左右,仅用于煤矿大巷运输,在顺槽巷道无法使用,导致物料转运效率低、工作强度大、安全性差。为实现快速高效掘进,本文研发了一种窄型四轮独立转向系统,其结构紧凑、输出扭矩大、质量轻,能够控制车轮完成大角度范围内迅速、准确、安全、平稳的转向动作,满足无轨车辆在窄型顺槽巷道和快速掘进巷道内运行的要求,以提高机械化水平和运输效率。它是煤巷高效快速掘进、钻锚和岩巷一体化快速支护技术与装备中必要的辅助配套设备[1-3]。
1 独立液压转向系统
本文研究的矿用车辆液压转向系统,可以实现矿用车辆在狭小复杂地形下的灵活行驶和精准控制。该液压转向系统采用负载敏感回路对车辆进行多种模式的转向切换及高精度、高灵敏度的四轮独立转向控制。控制系统如图1所示。方向盘上的转向控制信号通过比例放大器,将放大的信号驱动比例多路阀动作,使液压油驱动转向油缸动作,转向油缸驱动转向轴,使轮胎转向。转向轴上的转角传感器将轮胎转向角度的反馈信号反馈到控制器,控制器将反馈信号与输入信号形成闭环控制,使转向油缸完成转向动作。

1-方向盘;2-转向力矩模拟装置;3-变量泵;4-转角传感器;5-控制器; 6-轮胎;7-位移传感器;8-电液比例阀;9-转向油缸。
2 液压转向系统设计
液压转向系统原理如图2所示。通过控制负载敏感回路中的电液比例换向阀,可以精确控制每个车轮的转向角度。通过控制器使四个车轮按照预设的转向参数进行独立转向,以满足阿克曼转向原理,从而避免寄生功率的产生和轮胎磨损。通过控制该液压转向系统,能够实现多种可切换转向模式及四轮独立转向[4-5]。
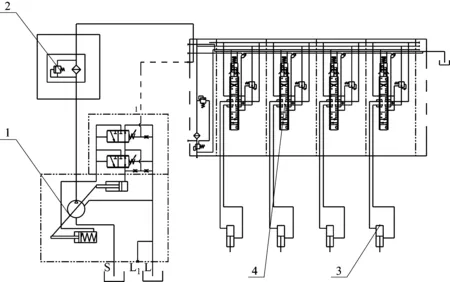
1-负载敏感变量泵;2-高压过滤器;3-转向油缸;4-负载敏感电液比例多路阀。图2 液压转向系统原理
3 液压转向模式分析
为保证矿用顺槽车能在狭小复杂路况下灵活行驶,该液压转向系统设计了前轮转向、后轮转向、四轮转向、斜行、原地转向5种转向模式,如图3所示。由控制器对这5种转向模式进行控制。
4 液压转向系统仿真模型建立及分析
在仿真软件中搭建了多模式四轮独立液压转向系统的模型,如图4所示。分析了不同工况下油缸的相应特性。
设定给方向盘一角度阶跃信号,方向盘输入信

(a) 前轮转向
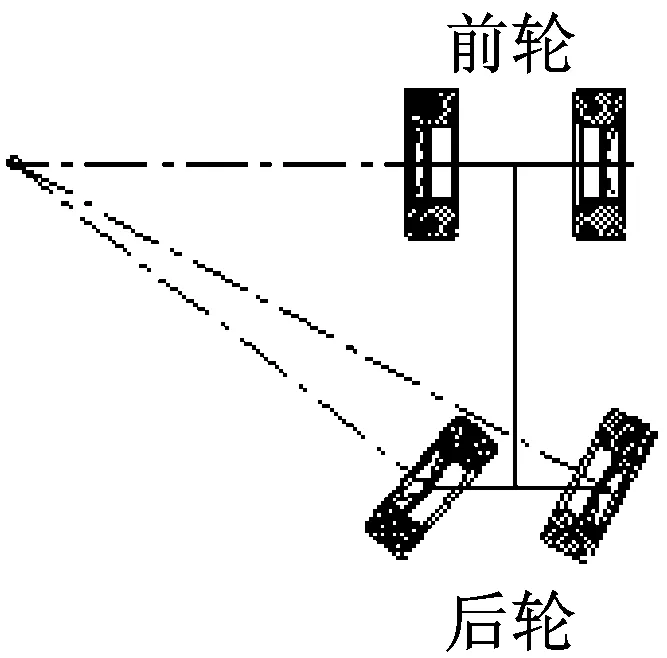
(b) 后轮转向
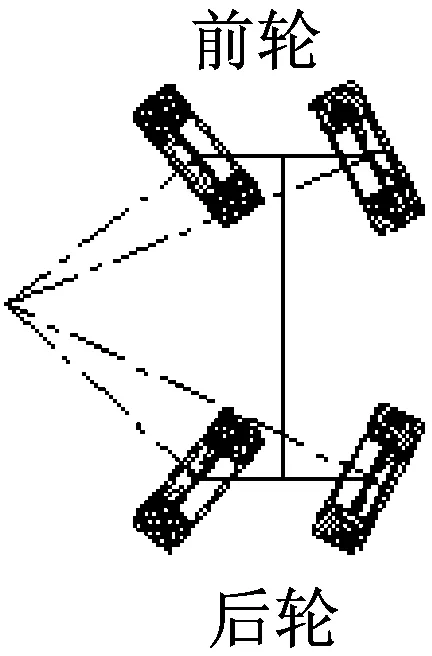
(c) 四轮转向
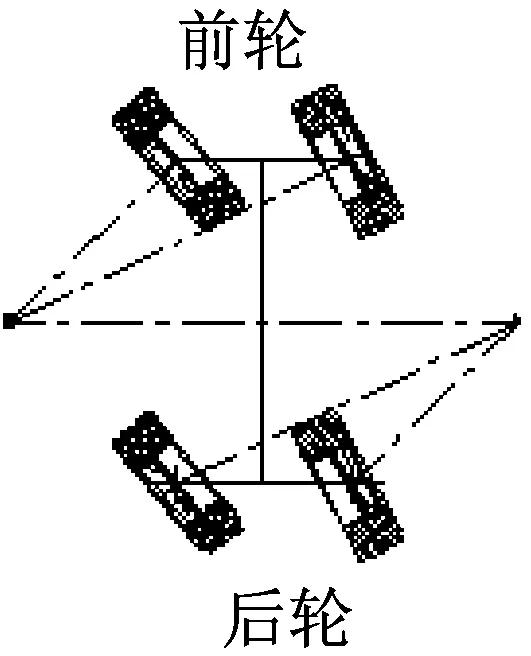
(d) 斜行
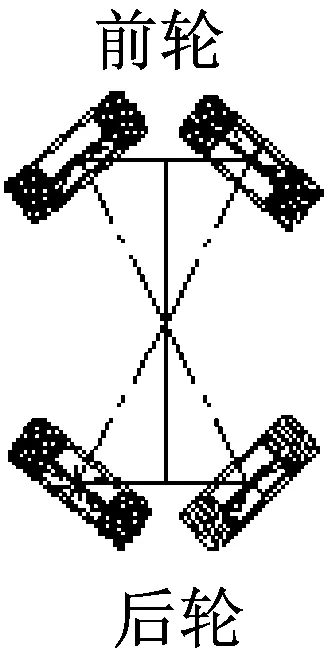
(e) 原地转向图3 转向系统的5种转向模式
号和轮胎偏转角度反馈信号如图5所示。在前轮转向模式下,4个车轮的偏转角度反馈信号如图6所示,左右前轮经约0.7 s完成转向并达到稳定状态,左前轮(内侧)偏转角度大于右前轮(外侧)偏转角度,左右后轮基本保持在初始位置,未发生偏转。在后轮转向模式下,4个车轮的偏转角度反馈信号如图7所示,左右后轮经约0.7 s完成转向并达到稳定状态,左后轮(内侧)偏转角度大于右后轮(外侧)偏转角度,左右前轮基本保持在初始位置,未发生偏转。在四轮转向模式下,给方向盘输入一斜坡信号,4个车轮的偏转角度反馈信号如图8所示,4个车轮在0.1 s开始发生偏转,左右前轮向左偏转,左右后轮向右偏转,内侧车轮偏转角度大于外侧车轮偏转角度,偏转角度跟随性良好。在斜行模式下,4个车轮偏转角度反馈信号如图9所示,左右车轮在0.7 s完成转向并达到稳定状态。在原地转向模式下,4个车轮偏转角度反馈信号如图10所示,4个车轮经过1.5 s完成相同角度偏转并达到稳定状态,左前、右后车轮向右偏转,右前、左后车轮向左偏转。
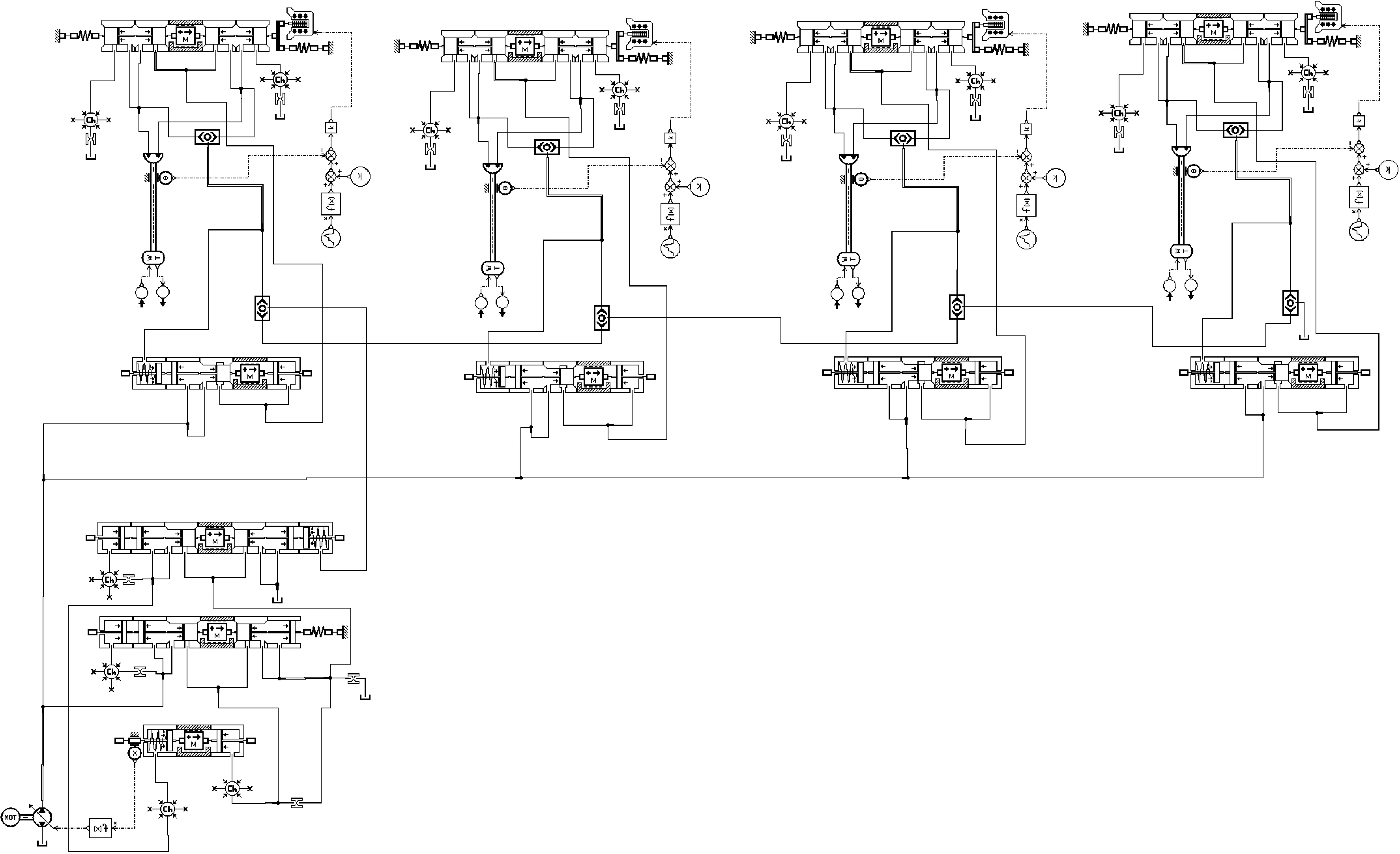
图4 液压转向系统的仿真模型

图5 阶跃输入和轮胎偏转角度反馈信号

图6 前轮转向模式时轮胎偏转角度反馈信号
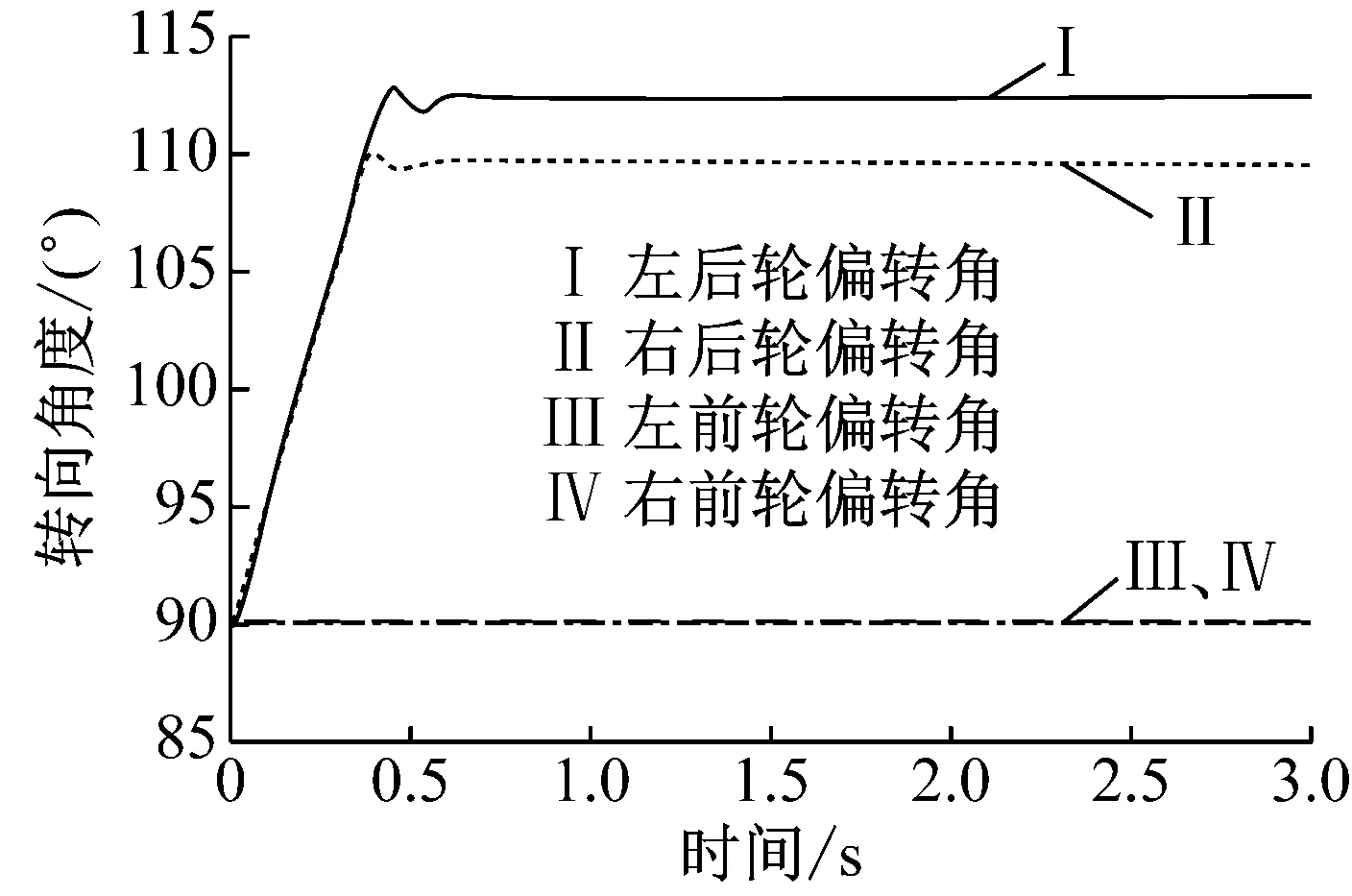
图7 后轮转向模式时轮胎偏转角度反馈信号
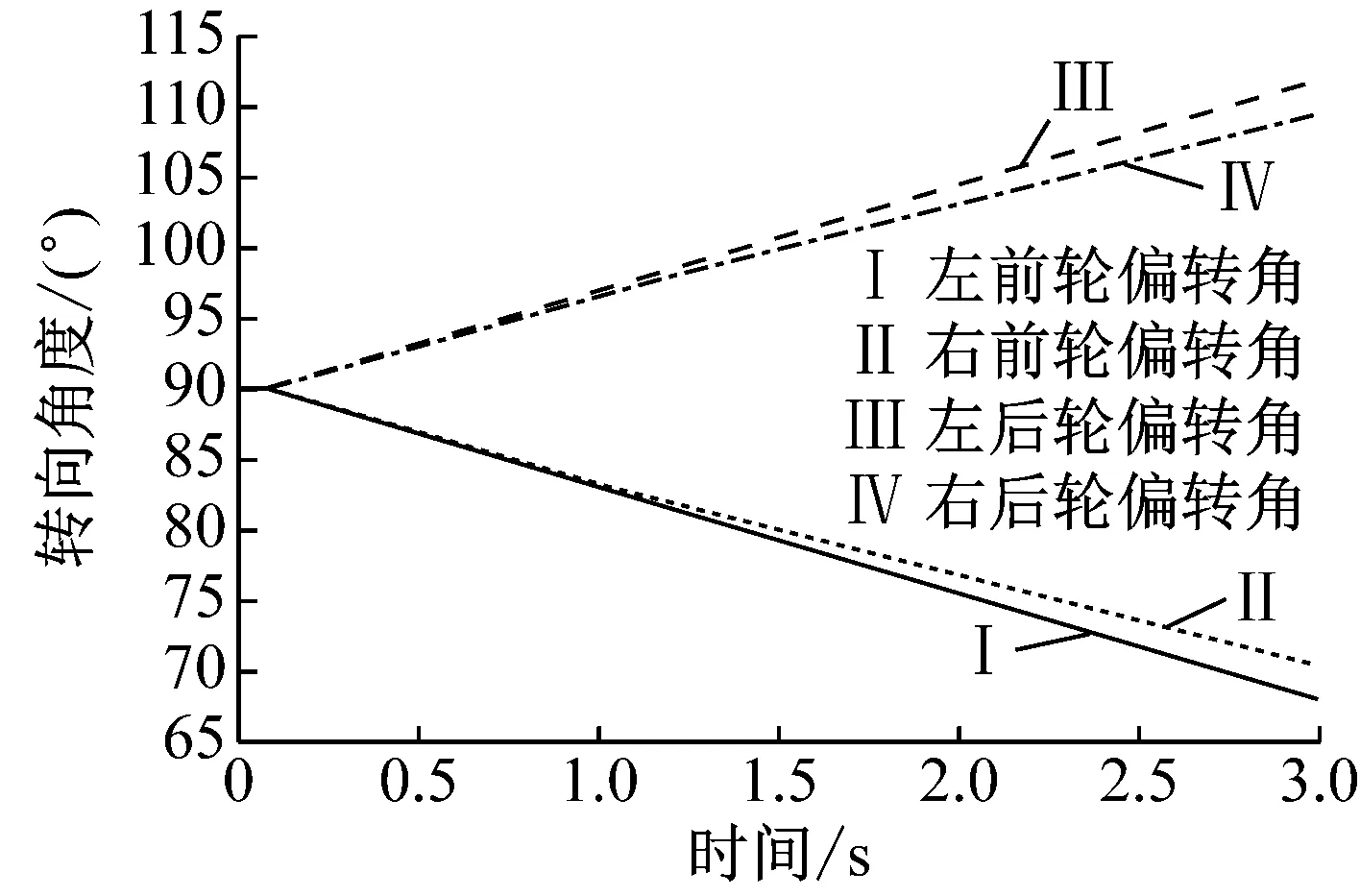
图8 四轮转向模式时轮胎偏转角度反馈信号
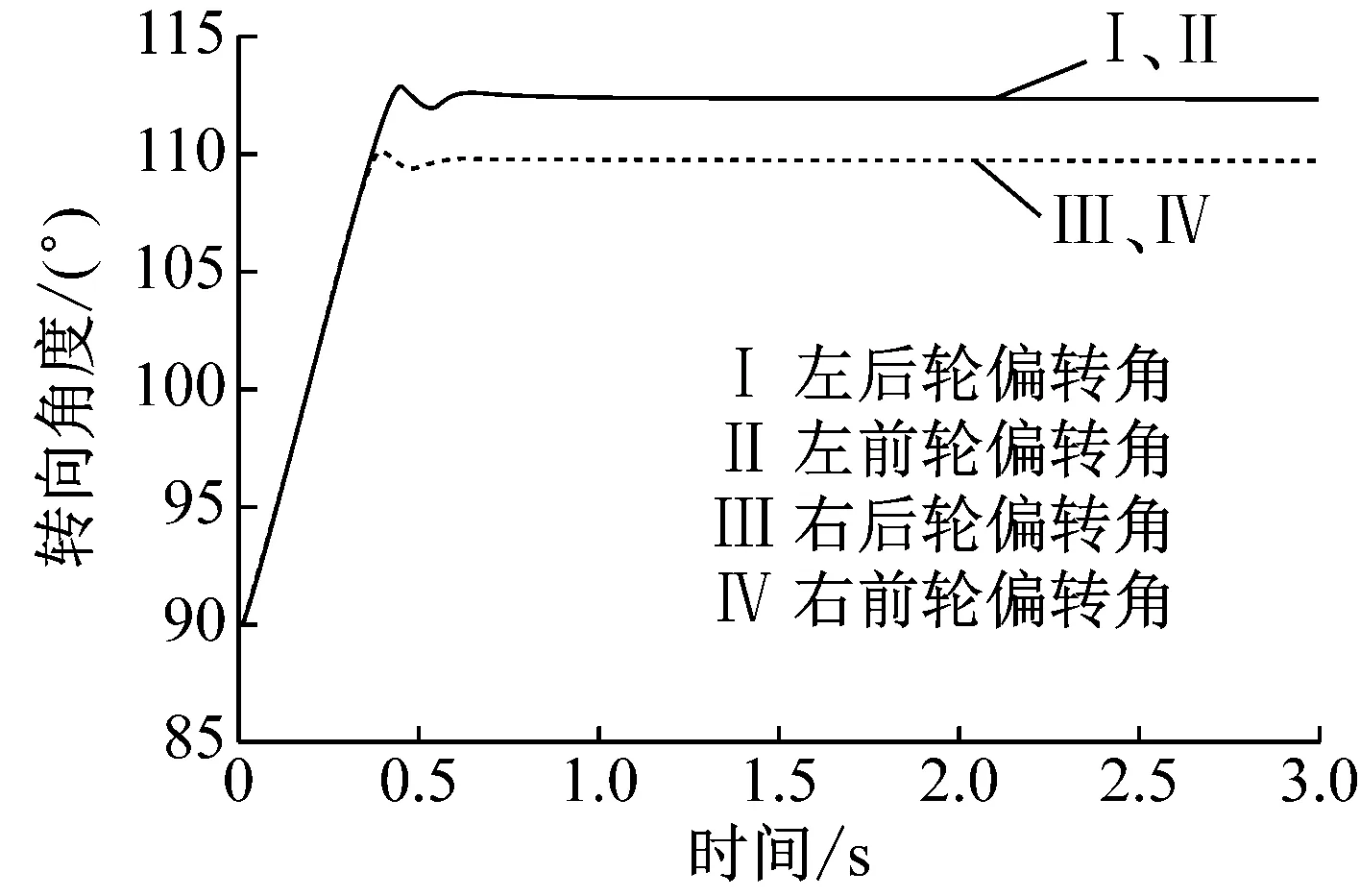
图9 斜行模式时轮胎偏转角度反馈信号
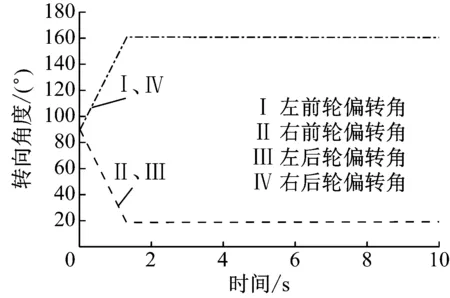
图10 原地转向模式时轮胎偏转角度反馈信号
仿真结果表明,该液压转向系统能实现通过控制器改变电比例多路阀的阀口开度来独立控制4个轮胎偏转角度和速度的负载敏感调节,液压系统具有稳定的控制性能和响应特性。
5 结论
本文基于矿用顺槽车在狭小地域和复杂地形条件下行驶,对矿用顺槽车多模式四轮液压转向系统进行了研究。通过仿真试验和分析,证明所设计的液压转向系统的转向特性能够满足实际需求,可实现顺槽工况下的预期效果。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
汽车零部件(2022年5期)2022-05-30
科学与财富(2021年35期)2021-05-10
小学生学习指导·爆笑校园(2019年6期)2019-09-10
科技创新与品牌(2017年9期)2017-10-20
发明与创新·中学生(2017年7期)2017-07-10
集装箱化(2016年8期)2016-10-20
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10