整车坏路可靠性试验的无人化技术研究
2020-10-26 07:27:36郑建明张宇飞覃斌张建军高坤
汽车技术 2020年10期
郑建明 张宇飞 覃斌 张建军 高坤
(1.中国第一汽车股份有限公司研发总院,长春 130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130013)
主题词:强化坏路 自动驾驶 可靠性试验 循迹行驶 障碍物感知
1 前言
强化坏路试验是考核车辆可靠性的关键方法之一,目前主要以道路强化[1-3]和仿真[4-6]方式开展,正在向无人化、智能化和规范化的方向发展。专业驾驶员驾驶车辆开展整车强化坏路试验的缺点是:人工驾驶具有随意性,影响数据的准确性;无法实现不间断驾驶;夜间和极端天气条件下难以开展;部分弯道操作难度大,可能导致横向应力考核不足。
为解决人工驾驶存在的问题,美国ASI公司提出了基于驾驶机器人的可靠性试验无人化方案,通过链接在转向盘、油门和制动踏板上的执行机构实现转向、加速及制动等控制。目前,国内无人化测试技术仍停留在理论研究阶段[7-9]。2017 年,上海泛亚汽车技术中心研发了基于驾驶机器人的智能驾驶辅助平台,并在动态广场和比利时路等路段进行了现场演示,但还未形成完备的系统和成熟的测试方法。
本文对某款纯电动汽车的底盘进行线控化改造,并配置底盘域控制器、自动驾驶主控制器、定位和感知传感器、通讯系统及远程云端监控系统等,开发适用于试验场强化坏路的无人化自动驾驶测试系统和测试流程,以实现按试验规范自动执行测试任务。
2 无人化测试系统架构设计
无人化测试系统分为云端和车端2 个部分,如图1所示。云端系统即云端监控平台,采用已商用化的云服务平台,通过网络将车端传感器收集到的数据上传至云端进行处理并存储在数据库中,在数据库内完成分析并生成各种试验报表,同时,可通过客户端软件进行云端操作和监控,如起动、暂停运行和任务下发等;车端系统的核心是车载智能计算控制平台,结合车辆平台及传感器等外围硬件,使车辆具有自动驾驶的能力[10-12]。
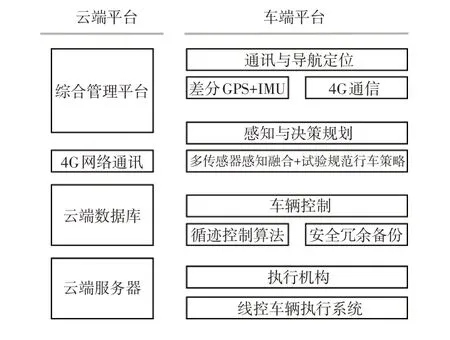
图1 无人化测试系统
2.1 云端监控平台设计
云端监控平台按功能分为客户端、控制层、服务层、数据层、实时显示推送系统和智能网关。控制层负责将客户端请求分发到相应的服务层,并对客户端进行响应;服务层包括注册配置中心、基础服务及业务服务,负责实现试验员、管理员等不同权限账户的注册管理、设备管理、车辆监控及命令下发等功能;数据层负责车辆数据存储;实时显示推送系统负责车辆日常及故障信息的推送、任务下发等,保证试验员全面掌握车辆与系统的工作状态;智能网关在保证通讯链路可靠安全的前提下完成平台与车辆之间的数据传输。
2.2 车载智能计算平台设计
车载智能计算平台架构主要由异构分布硬件架构和基础框架软件组成[13-14]。当前单一芯片尚无法满足多接口、高算力的要求,同时,该平台需接入多类型、多数量的传感器,且需要高可靠和高性能的计算能力,因此采用异构分布架构。异构分布架构由人工智能(AI)单元、计算单元和控制单元组成。基础框架软件包括系统软件和功能软件,其系统要求可靠运行、实时计算、弹性分布及高算力等,同时可实现感知、规划、控制、网联及云控等功能。
系统软件即为适应异构分布硬件架构的嵌入式系统运行环境。功能软件采集传感器数据、设备数据及车端数据,通过感知、决策模块的综合计算,结合行驶任务要求,通过执行模块输出执行机构可用的加、减速信息、转向盘转角、转速等信息,通过寻迹开展自动驾驶测试。功能软件具备与云平台交互、离线调试、日志存储等诸多功能,如图2所示。
功能软件中的安全冗余模块(Security Redundancy Controller,SRC)作为主控制器与底盘域控制器之间的桥梁,其功能主要是采集和发送车辆信息给主控制器,并将主控制器的信息传递给底盘域控制器,同时,SRC可提供故障监测与处理、循迹算法冗余备份等功能,以此提高系统安全性。
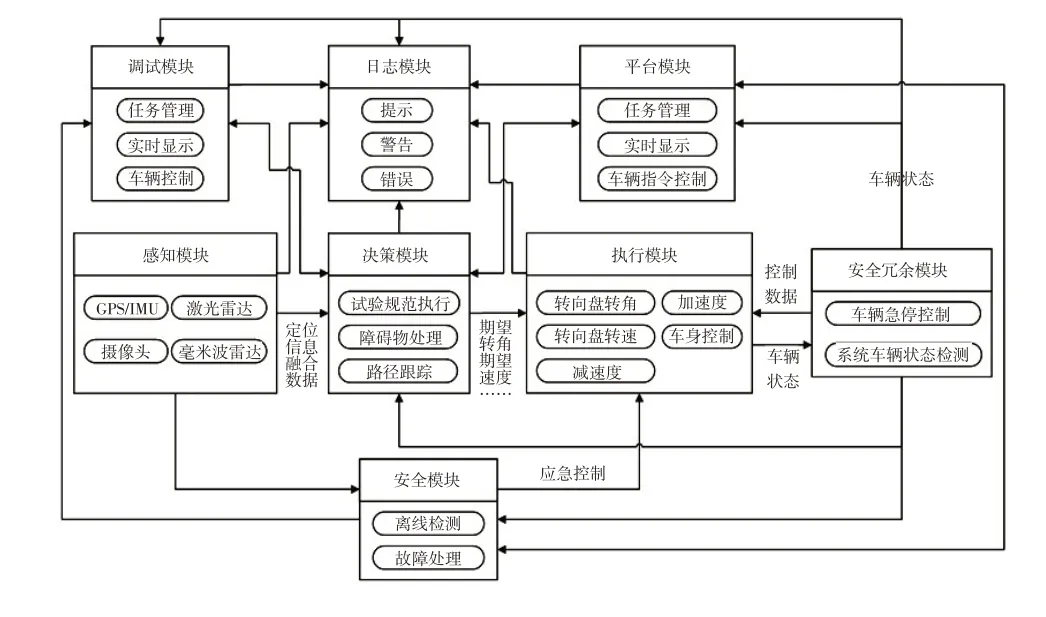
图2 功能软件模块
2.3 无人化测试系统试验流程设计
基于操作方便、使用简单的原则,需将文本化的试验规范转换为测试系统可读的二进制文件,试验规范制作流程如图3所示。制作规范时,软件应根据特征路段与车速自动计算出合理的加、减速点,同时,当用户设置路径中任意点作为变速点时,软件应依据达到此点前的速度与加速度自动计算出所需要的加速或减速距离,并在界面中清晰显示。
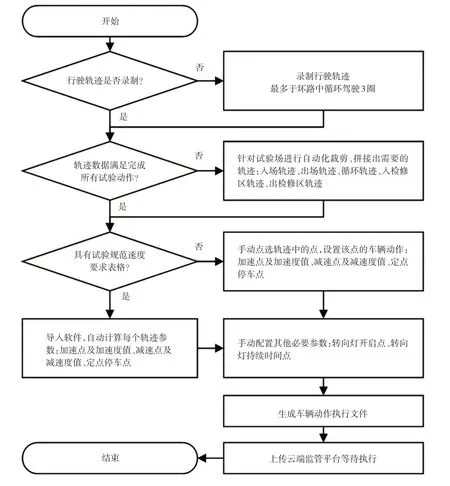
图3 试验规范制作设计流程
3 无人化测试系统硬件配置及功能
车载自动驾驶硬件系统主要包括主控制器、不间断电源、实时动态(Real-Time Kinematic,RTK)+惯性测量单元(Inertial Measurement Unit,IMU)组合导航模块、机器视觉单元、激光雷达及毫米波雷达等。车端系统除接收云端任务数据和指令(起动、暂停及停止任务等)、代替驾驶员控制车辆外,还应具有可移植性。系统硬件配置如图4所示。
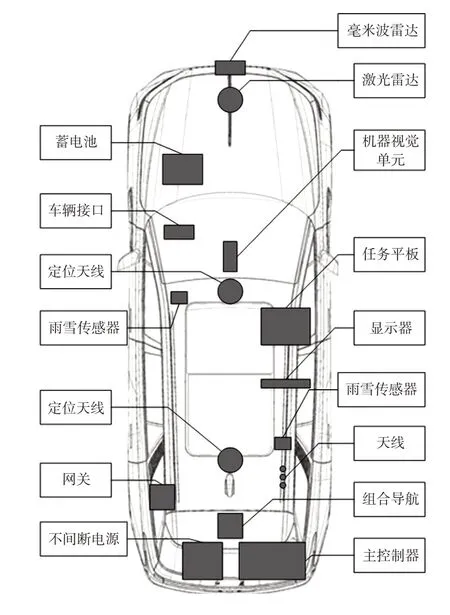
图4 无人自动驾驶系统硬件配置
3.1 组合惯导寻迹配置及功能
为满足车辆高精度定位要求,采用RTK+IMU 的组合导航方案进行寻迹行驶,如图5所示。RTK采用载波相位差分技术,在开阔场地可实现厘米级定位,与IMU融合后,即使RTK信号差,系统仍可实现亚米级定位。

图5 RTK+IMU模块
3.2 多传感器融合硬件配置及功能
大部分强化坏路颠簸不平,车身上下起伏及车头俯仰频率随车速和路面强化系数的增加而增加,在极限路段可造成各传感器的误检和漏检概率增大,尤其是毫米波雷达会频繁扫描地面造成误检,不能单独使用,因此需配置多传感器并进行数据融合,以减少误检和漏检。本文将机器视觉、激光雷达和毫米波雷达进行数据级融合,其中:视觉单元作为主要传感器,如图6所示,可识别到前方远距离(≥50 m)的车辆和行人,但对距离的感知精度不高,且在近距离处误差较大;在较近距离(≤30 m)采用16线激光雷达作为安全传感器,如图7所示,其测量精度可达厘米级,且对各种非透明障碍物有良好的探测能力,如轮胎和锥桶等;毫米波雷达探测距离更远(≥100 m),如图8 所示,可同时测量障碍物的位置和速度,且不易受天气影响,但毫米波雷达照射角小,仅可在直路段使用,弯道及颠簸路面探测距离受限且易误检测,因此用作辅助传感器。

图6 机器视觉单元布置
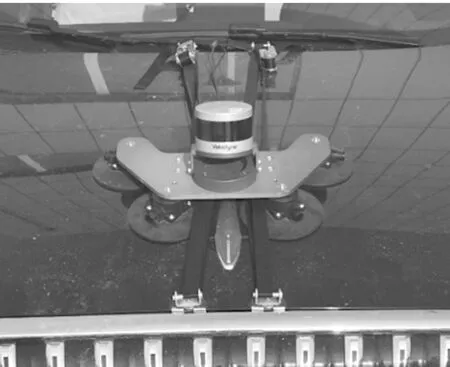
图7 激光雷达布置
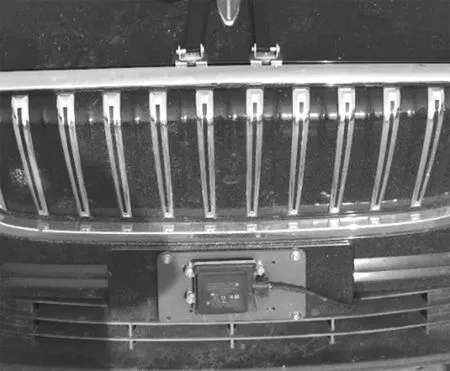
图8 毫米波雷达布置
3.3 主控制器及不间断电源配置及功能
主控制器和不间断电源如图9所示:主控制器负责各传感数据的融合,结合任务指令进行路径规划和动作决策等;电源系统采用不间断供电技术,从整车蓄电池取电供给各子系统,当蓄电池无法输出电能时,无缝切换到电源内部锂电池供电状态。同时,针对强化坏路的恶劣环境,设计了减振机构,为主控制器与电源系统部件提供缓冲,以增强系统的可靠性。
3.4 通讯及交互系统硬件配置及功能
车辆通过总线接收主控制器发送的控制命令实现油门、制动及转向执行功能,同时将车辆多种状态信息通过通讯链路向外发送。底盘域控制器负责连接线控车辆与主控制器,对往来数据进行加密和解密,保障系统信息安全,且与主控制器的通讯采用自定义接口和数据格式,实现系统的可移植性。通讯系统采用2套通讯链路实现安全冗余:主链路采用4 GHz 通讯,用于车端与云端系统间的数据交换;辅助链路采用2.4 GHz通讯,可使用手持遥控器远距离遥控停车。
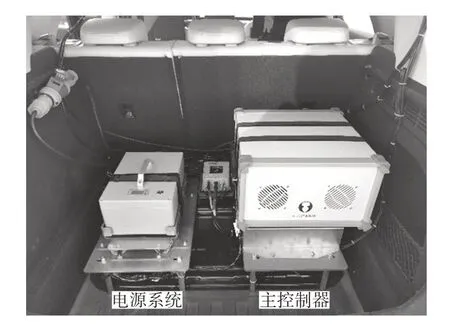
图9 电源系统和主控制器布置
4 无人化测试系统软件设计
4.1 自动驾驶横向控制
横向控制器主要由前馈控制器和反馈闭环控制器构成,前馈控制消除跟踪轨迹误差,反馈闭环控制器主要起到求取最优控制解的作用。反馈闭环控制器依托车辆动力学模型,基于车辆系统状态方程计算控制量,引入线性二次型调节器(Linear Quadratic Regulator,LQR),穷尽最优解,使得轨迹能量函数最小,最终达成精准控制,横向控制原理如图10所示。

图10 横向控制原理
4.1.1 车辆动力学模型的建立
基于单车模型假设,搭建车辆动力学模型,仅考虑纯侧偏轮胎特性,忽略轮胎力的横纵向耦合关系、横纵向空气动力学及载荷的左右转移,同时将横、纵向动力学分开。跟踪轨迹误差为相对于道路的位置误差及方向误差,空间状态模型[12]为:
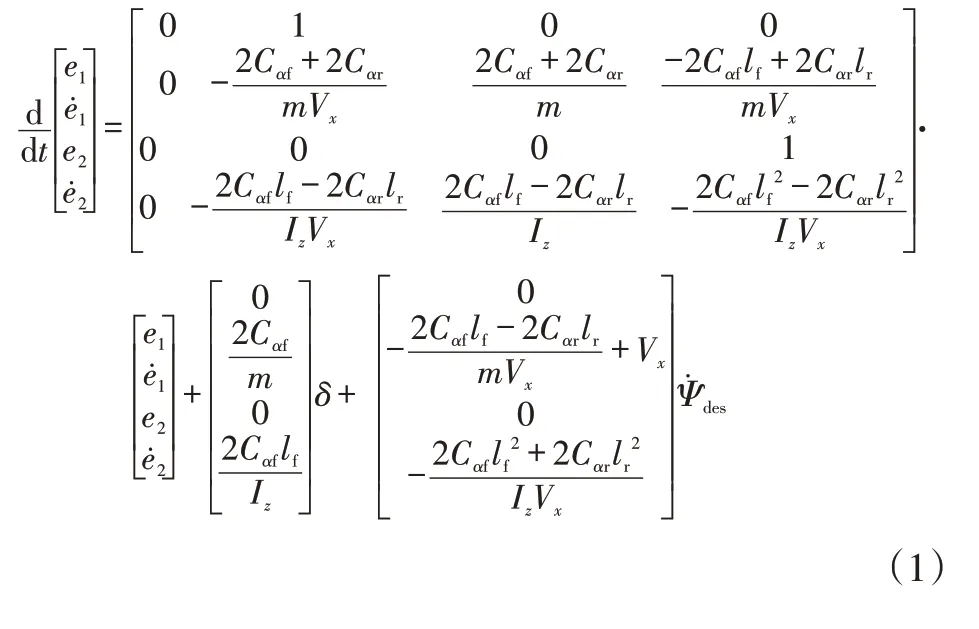
式中,e1为车辆的横向偏差,即车辆质心到中心车道线的距离;e2为车辆行驶方向相对于道路方向的误差;Cαf、Cαr分别为车辆前、后轮的侧偏刚度;lf、lr分别为车辆质心到前、后轴的距离;m为车辆质量;Vx为车辆纵向速度;Iz为车辆相对z轴的转动惯量;为车辆期望横摆角速度;δ为前轮转角。
4.1.2 最优LQR横向控制原理

因控制矩阵[B1AB1A2B1A3B1]是满秩的,说明系统可控,因此,设系统控制律[12]为:

式中,k1~k4为矩阵K的4个特征值。
为了获得期望特征值,使用最优控制中的LQR 对闭环矩阵A-B1K的特征值进行计算[13-14]。
系统的最优前轮转角的离散形式表示为:

式中,K=[R+B1TP B1]-1B1TPA。
其中矩阵P可通过代数黎卡提方程求解[13-14]:

式中,Q为状态权重系数;R为控制量权重系数。
为了获得新闭环系统的状态矩阵的合理特征值,使用LQR调节器,引入目标函数[13-14]:

依据路面状况、车辆机械参数限制及系统的性能指标,通过调节Q与R达到理想效果,并利用MATLAB 的LQR 工具箱求得最优解对应的矩阵K的4 个特征值k1~k4,带入式(3)可求得最优前轮转角,再根据车辆转向比,即可求得转向盘的转速与转角。
由于车辆控制器存在控制周期误差,针对特征路面类型及曲率,引入预瞄距离:

式中,K1为预瞄速度系数;K2为道路曲率系数;V为当前车速;r为当前轨迹半径。
由于道路曲率与车速的不同,K1、K2需要设定不同的参数,预瞄距离参数配置如表1所示。
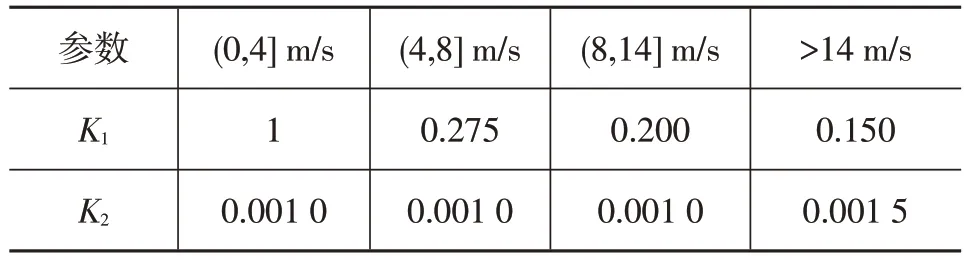
表1 预瞄距离参数区间划分
LQR 最优设计是指设计出的状态反馈控制器K要使二次型目标函数J取最小值,而K由权矩阵Q与R唯一决定,故Q、R的选择尤为重要。由式(1)与式(6)可知,在LQR计算过程中,需要进行航向和横向的权值比例分配,使车辆横向输出控制角度误差逐渐趋于稳定。本系统中,将航向权值分配系数设置为0.5,横向权值分配系数设置为0.01,通过误差插值表进行权值的优劣区间划分,如表2 所示。通过实际调试,达到最优控制的目的。控制流程如图11所示。
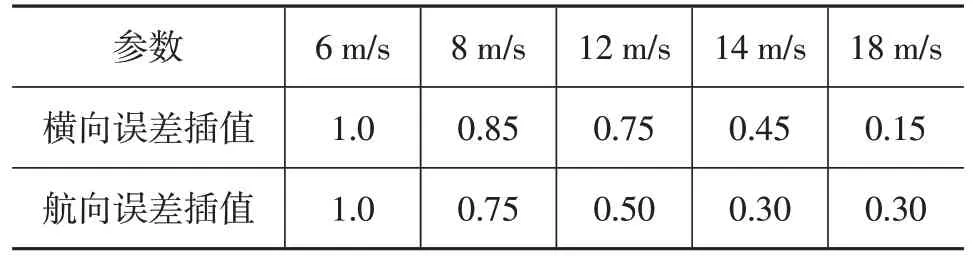
表2 误差插值表
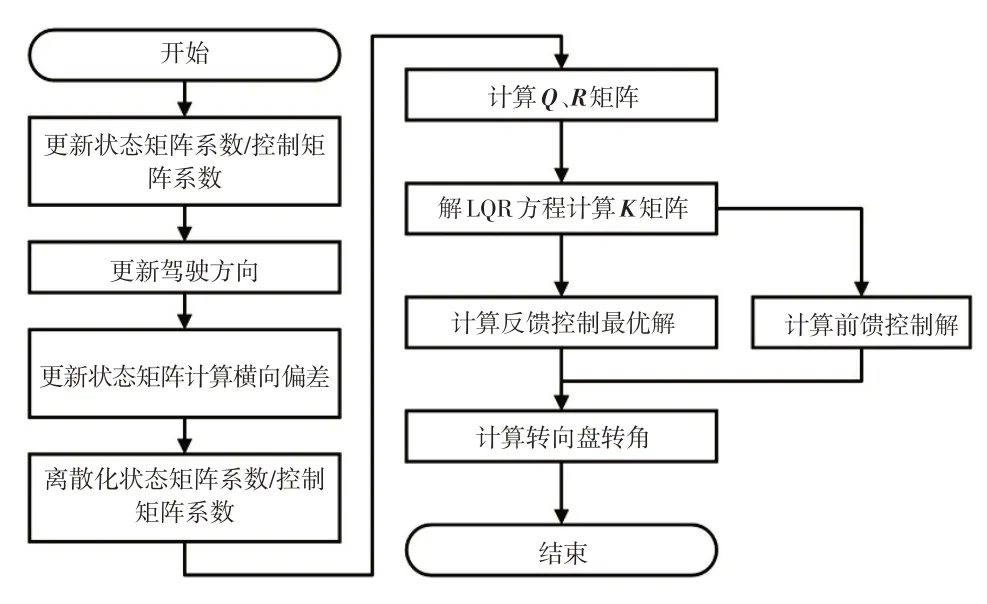
图11 横向控制流程
4.2 无人化自动驾驶纵向控制
纵向控制主要由速度-加速度闭环PID 控制器实现。输入期望车速与当前车速偏差,计算加速度,再根据IMU 反馈的X、Y、Z方向加速度作为补偿量,最终计算出实际执行的加速度并输入底盘域控制器,纵向控制原理如图12所示。

图12 纵向控制原理
4.3 自动驾驶环境感知
根据系统使用环境和路面特点,采用多传感器融合进行环境感知,感知逻辑流程如图13所示。
融合部分分为5 个部分,分别是激光雷达+毫米波雷达+视觉传感器、激光雷达+视觉传感器、毫米波雷达+视觉传感器、单独激光雷达、单独视觉传感器,其中激光雷达+视觉传感器融合逻辑为当二者探测的目标物距离相差<5 m 时,确定该位置存在障碍物,并取激光雷达探测距离数据执行相应控制逻辑,单独视觉传感器在使用过程中的限制条件为探测障碍物纵向距离>49 m,若条件限制不满足则需要依据激光雷达探测结果,保证车辆安全制动。

图13 环境感知流程
由于路面不平整度较大,在部分路面需关闭毫米波雷达,否则误识别率极高,无法正常行驶。各路段感知融合状态开关如表3所示。
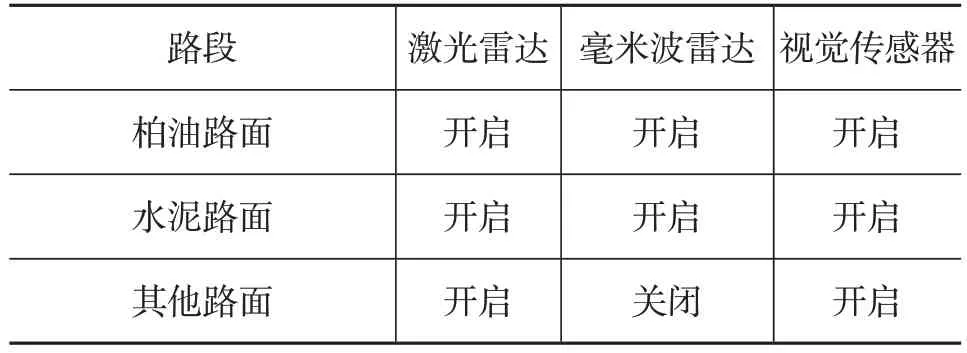
表3 不同路面传感器使用情况
5 无人化测试系统运行结果分析
本文基于搭载无人化测试系统的某纯电动汽车在某试验场进行了一定里程的强化坏路试验。强化坏路试验规范要求的车速偏差为±2 km/h,车辆横向偏移在±0.3 m 以内,且须长期保持一致性。经统计,人工驾驶的车速偏差至少在20%以上,无法保证试验精度要求。经测试,无人化系统即使在高速急弯路段,横向平均偏移也可控制在±0.2 m以内,纵向行驶速度偏差可控制在±0.2 m/s 以内,无人化测试系统横向偏差如图所示,无人化测试系统与人工驾驶的速度对比如图14所示。

图14 自动驾驶横向偏差
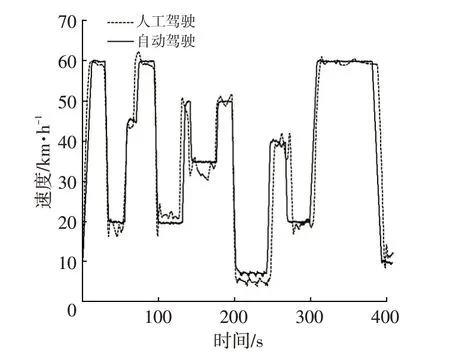
图14 自动驾驶与人工驾驶的速度曲线对比
6 结束语
本文提出了整车坏路可靠性试验的无人化测试方案,以某纯电动汽车为试验对象进行了系统搭建。试验结果表明,无人化测试系统可用于场地可靠性试验,且在规范执行、精度控制等方面均有显著优势。
本文重点研究了无人化测试系统代替人工驾驶的技术及可行性,但车辆点检及问题暴露等方面工作仍需试验员辅助完成,目前已实现轮胎压力、车门状态等少数状态量的实时自动获取,需要在后续开发中加快应用智能传感、云平台远程控制等先进测试技术,提升故障检测能力,快速推进全试验链的无人化进程。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
学生天地(2020年5期)2020-08-25 09:09:08
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
电子测试(2018年10期)2018-06-26 05:53:36
汽车博览(2016年9期)2016-10-18 13:05:41
交通建设与管理(2015年15期)2015-03-20 15:19:15
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17