
基于基本回路修正的AHP一致性调整方法研究
2020-10-24 02:21吴诗辉
运筹与管理 2020年4期
解 江, 吴诗辉
(1.西北政法大学 经济学院,陕西 西安 710063; 2.空军工程大学 装备管理与无人机工程学院,陕西 西安 710051)
0 引言
AHP法作为多属性决策的一种常用方法,在诸多领域得到了广泛应用,比如经济、社会、管理、军事等,其基本原理是由决策者(decision maker,DM)对需要排序的方案或指标进行两两比较,构建一个两两比较矩阵,即判断矩阵(pairwise comparison matrix,PCM),通过对PCM的分析得出最终排序结果。由于决策者认识局限性、主观判断失误等原因,很可能出现判断前后不一致的情形,因此,必须对PCM进行一致性检验,对于不能通过一致性检验的PCM必须首先进行一致性调整,才能保证决策结果的有效性。
一般来讲,根据PCM不一致形成的原因,可分为数值不一致和逻辑不一致两类:比如E1是E2的2倍,E2是E3的3倍,则E1应是E3的6倍[1],而实际上E1判断为E3的2倍,这就会导致数值上的不一致(这里指数值上不完全一致,即CR>0);如果E1判断为E3的1/2倍时,则出现了逻辑错误,因为E1至少应该优于E3,称为逻辑不一致。
现有针对AHP一致性修正的文献很多,可以归结为以下几类:一是只考虑由于数值不一致引起的PCM不一致[2~5],这类文献一致性修正的目标是使得CR<0.1,同时对PCM的修改量达到最小。Xu & Wei[2]设计了判断矩阵的迭代算法,使得一致性指标单调下降,从而得出具有满意一致性且改动量符合要求的判断矩阵,由于该算法追求修正幅度最小化,因此,对于存在逻辑不一致的PCM,修改后逻辑不一致将依然存在(因为要改变逻辑不一致,需要某些元素发生较大改动,如从6改为1/6)。因此,这类文献的方法主要适用于只存在数值不一致的PCM修正。二是主要考虑由于逻辑不一致引起的PCM不一致[6,7]。这类文献的常用方法是找到PCM中的三阶回路,并采取各种手段消除三阶回路[8],从而达到逻辑一致。Gass[9]利用图论的方法确定三阶回路的数量,并通过标准线性规划方法找出这些三阶回路,从而实现逻辑一致性修正。Siraj等[6]给出了找出逻辑不一致元素的方法,而对于如何修改该元素,则是采用了简单将其取倒数的方法,对PCM进行一致性修正,该方法虽然能够解决逻辑不一致问题,但是数值不一致可能依然存在,例如本文的例3。这类文献一致性修正的目标是使得CR<0.1,同时逻辑上满足一致性。
本文认为,AHP一致性调整的目标,是能够同时解决逻辑不一致和数值不一致问题,并保证除逻辑不一致元素外的其他元素修改量最小。基于此,本文提出一种基本回路分析算法,找出最不一致元素,然后对该元素构建优化模型得到最佳值,使得修正后的矩阵的一致性得到最大改善。此方法的优点在于不需要对逻辑不一致和数值不一致分开研究,而是可以同步实现逻辑不一致和数值不一致的修正。
1 相关定义
假设有n个方案(或指标)E1,E2,…,En的排序问题,在AHP中用两两比较元素aij表示两个方案的优劣程度。用符号→表示“优于”,用符号~表示“相等”。若决策者认为Ei优于Ej(Ei→Ej),则aij>1,若认为Ei与Ej同等重要(Ei~Ej),则aij=1,若认为Ej优于Ei(Ej→Ei),则aij<1。
定义1称判断矩阵A具有数值一致性(numerical consistency)[10],当CR(A)<0.1满足时;反之,当满足CR(A)≥0.1时,称A具有数值不一致性。
定义2称判断矩阵A=(aij)n×n中三个元素(aij,ajk,aki)构成一个三阶回路[6],当Ei→Ej→Ek→Ei成立时,为描述方便,将该回路记为i-j-k-i。
注意,这里暂时不考虑Ei~Ej的情形,若出现aij=1,可借鉴文献Kou et al.[8]中的做法,令aij=1.01(当i
定义3称判断矩阵A=(aij)n×n具有逻辑一致性(logical consistency,或称为transitivity[2], ordinal consistency[11]),当A中不存在任何一个三阶回路时。反之,称A为逻辑不一致。
定义4称判断矩阵A=(aij)n×n具有满意一致性,当且仅当A同时具有数值一致性和逻辑一致性时。
定义5基本矩阵和基本回路。对于一个判断矩阵A而言,可将其分解为若干个三阶判断矩阵,把这些三阶判断矩阵称为基本判断矩阵(或基本矩阵),记为(i-j-k),即:
把分解的过程称为基本矩阵分解。对于一个基本矩阵,若是逻辑不一致的,则这个基本矩阵必然构成一个三阶回路,称为A的基本回路;若是数值不一致的(即CR>0.1),称为A的数值不一致基本矩阵。对于基本回路和数值不一致的基本矩阵,统称为不一致基本矩阵。

定义6最不一致基本回路(Most Inconsistent Loop,MIL),即所有基本回路中具有最大CR值的基本回路。
定义7最不一致元素(Most Inconsistent Element,MIE),即该元素位于基本回路中,通过修改它能够使得整个PCM逻辑一致性得到改善,同时数值一致性得到最大改善(即CR值下降最多)。
需要说明的是,这里定义的MIE,是指利用2.2节给出的方法确定的最不一致元素。从定义7可见,MIE仅存在于PCM中具有基本回路的情形,或者说PCM为逻辑不一致的情形。同时,根据定义,MIE必须同时满足两个条件,一是修改它能够使PCM逻辑一致性得到改善,比如基本回路数量由2个减少为1个,二是CR值减少最多,比如CR由2.1减少到0.9,由于这里强调减少最多的一个,因此MIE只可能存在唯一一个(由于存在互反性,aij与aji是成对出现的,只考虑上三角元素,即认为是一个)。
定义8称元素aij发生了反向,当aij由小于1修改为大于1,或由大于1修改为小于1时。
假设在一个回路i-j-k-i中,aij发生反向,则回路Ei→Ej→Ek→Ei将变为Ej→Ek→Ei,同时Ej→Ei,此时回路i-j-k-i将不存在。因此,aij反向可用于修正逻辑不一致。
定义9两个反映修改程度的指标[2]。假设原始判断矩阵为A=(aij)n×n,经过一致性修正后的判断矩阵为C=(cij)n×n,则总调整量定义为:
(1)
其中cij不包含发生反向的元素。
单项最大调整量定义为:
σ=max{|cij-aij|}
(2)
其中cij不包含发生反向的元素。
注意,式(1)和式(2)中提到了cij不包含反向的元素,因为这两个指标主要是用于描述数值不一致的修改程度的,反向的元素调整量过大,比如由6调整为1/6,这显然不属于微调(改动不超过2),它不是引起数值不一致的主要原因,如果把这些反向元素考虑进来,则无法比较哪种方法的修改程度更小。
根据文献[2],当总调整量ε<1,单项最大调整量σ<2时,认为修改量是可接受的,即修改后的PCM保留了足够的原始PCM判断信息。
文献[6]指出,随着PCM阶数的增加,数值一致而逻辑不一致的概率非常高,比如3阶矩阵这个概率仅为0.63%,4阶矩阵为8.35%,5阶矩阵为29.75%,6阶矩阵则高达66.67%。这意味着对高阶矩阵进行一致性修正时,仅考虑数值不一致是不够的,必须要考虑逻辑不一致问题。基本回路都是3阶PCM,且逻辑不一致,因此,根据文献[6]的实验结论,将有99.37%的概率存在数值不一致,即CR值非常大,因此,如果能够对最不一致基本回路MIL进行一致性修正,则可以在减少PCM中回路的同时,改善PCM的数值一致性。这也是本文修正模型的一个理论基础。
2 基于基本回路修正的一致性调整模型
2.1 基本原理
定理1存在基本回路的PCM必然是逻辑不一致的。
证明由于基本回路中存在逻辑不一致,不妨假设基本回路为i-j-k-i,则意味着在这个基本回路的判断中存在逻辑不一致,说明决策者在判断三者关系时存在判断错误。该判断错误(或三阶回路)在整个PCM的中仍然存在,根据定义3,该PCM具有逻辑不一致性;相反,如果一个PCM没有基本回路,则意味着该PCM中不存在三阶回路,PCM在逻辑上是一致的。
定理2如果所有基本矩阵都是逻辑一致的,则PCM一定为逻辑一致性矩阵。
证明显然,如果每个基本矩阵都逻辑一致,则必然在PCM中不存在三阶回路,而一个没有三阶回路的PCM必然是逻辑一致的。
定理1和定理2实质是建立起了基本回路与PCM在逻辑不一致方面的相互关系,可作为本文后续研究的理论基础。
2.2 确定MIE
判断哪个元素是最不一致元素MIE(即决策者可能判断失误的元素),是本文算法能够成功的关键。这里给出确定MIE的两种方法。
2.2.1 CR和最大法
基本原理:不一致元素会带来包含它的基本矩阵的数值不一致(CR>0.1)和逻辑不一致(文中称基本回路),统称为不一致基本矩阵。计算包含该元素的所有不一致基本矩阵的CR之和,选出其中最大的一个作为MIE。这意味着修改它可同时解决多个不一致基本矩阵的不一致问题。具体步骤如图1所示。
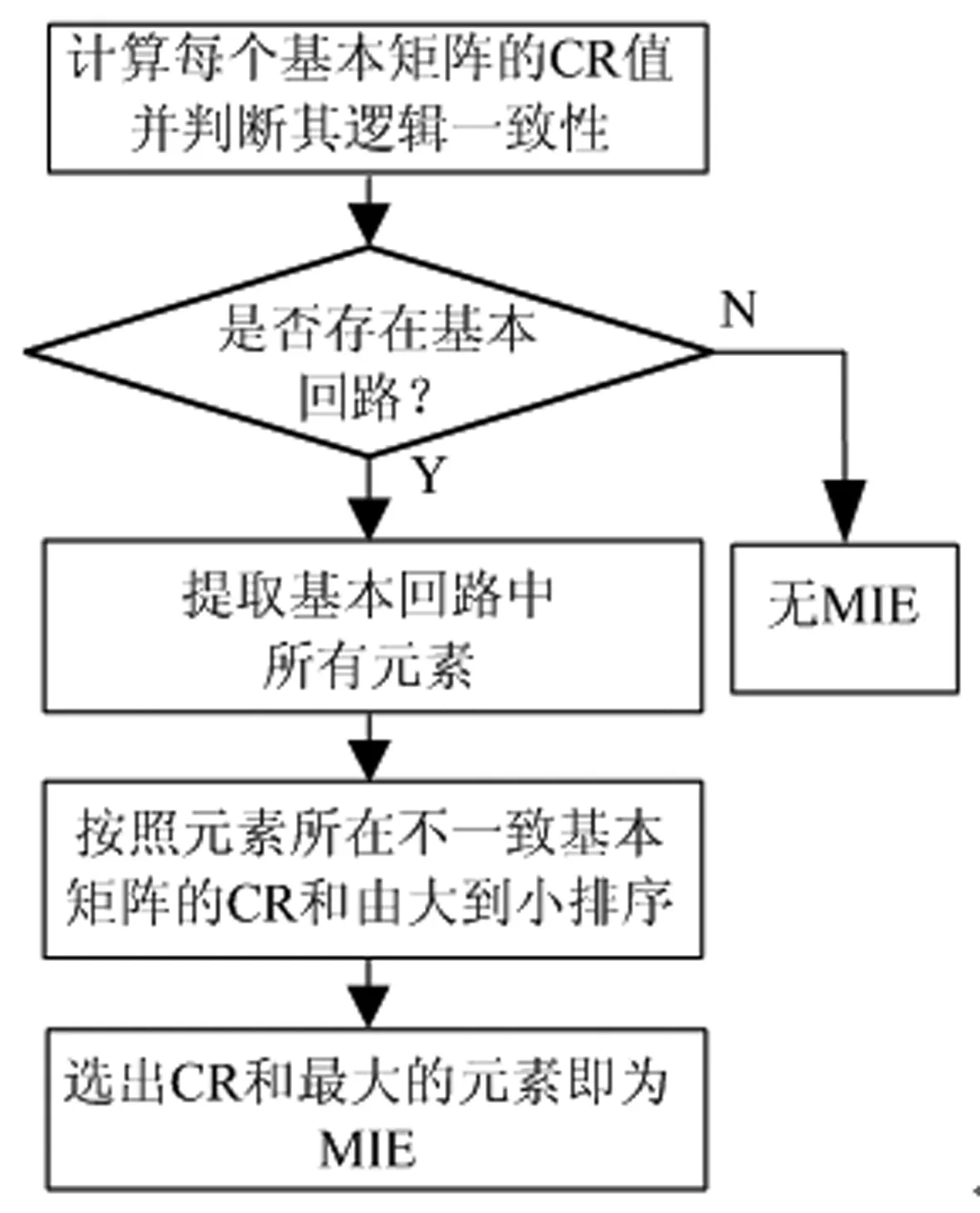
图1 CR和最大法确定MIE的步骤
当然,如果只存在一个不一致的基本矩阵,则将其对应的3个元素同时选为MIE。
2.2.2 优化法
基本原理:先从所有基本回路中找出MIL,分别对其中的三个元素利用2.3节优化模型进行修正,找出使得修正后的PCM对应CR最小的一个,作为选定的MIE。具体步骤如图2所示。
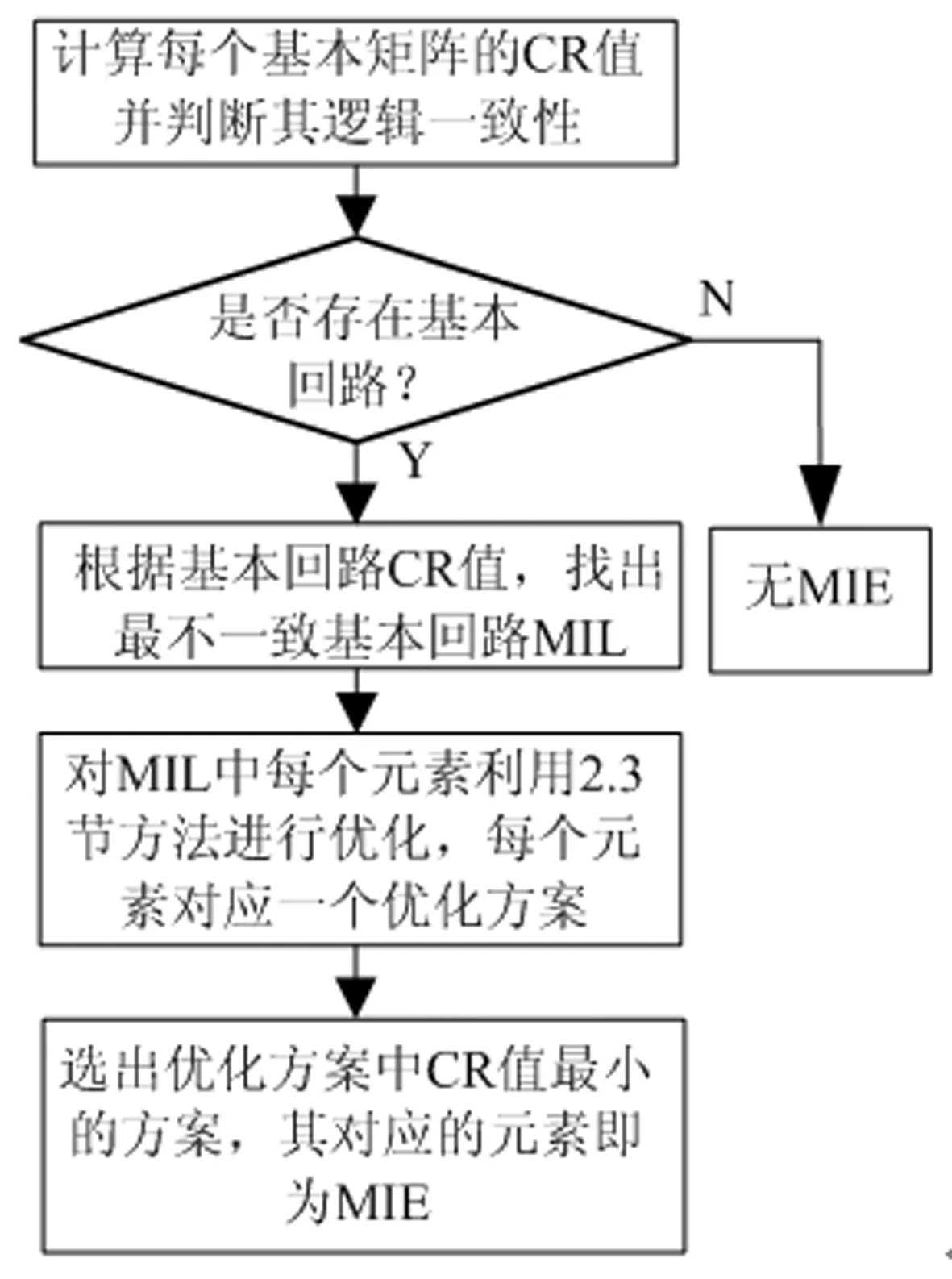
图2 优化法确定MIE的步骤
一般来讲,CR和最大法和优化法得到的MIE是相同的,这是因为,MIL对应的CR值往往是最大的,则MIE属于MIL的可能性很大,这是优化法的理论基础。但是,一旦两种方法得到不同的MIE,此时,要根据修改该元素对原始判断矩阵CR值的下降幅度来最终判断,即选择能够使得CR值下降最多的元素作为MIE。
2.3 构建优化模型
通过修改最不一致基本回路中的某个元素yi,使得修改后的PCM达到最佳的一致性水平:
(3)
其中,yi代表MIL中的1个元素的修正值,它可以在整个取值区间[1/9,9]上取值。
事实上,该优化问题可看做一个遍历寻优问题,只需要在[1/9,9]上每隔0.0001选择一个值,依次计算出修改后PCM的CR值,选出CR最小值对应的修正值即可。
值得注意的是,笔者曾尝试以修改最不一致回路(MIL)中某个元素使该MIL成为完全一致的三阶判断矩阵为优化目标,即式(3)中的优化目标为MIL对应的三阶判断矩阵的CR最小(而不是修改后PCM的CR最小),且对于一个不一致的三阶判断矩阵而言,修改一个元素值必然可使其CR=0,即达到完全一致。由于一个元素的改动尽管使得MIL完全一致,但是同时也会使包含它的其他基本矩阵的CR增加,从而导致整个PCM的CR值不降反增(模型进入永久循环),从而达不到数值一致性优化的目的。
2.4 建模步骤
整个建模步骤如图3所示。

图3 优化决策模型实施步骤
Step1专家进行决策,给出判断矩阵A=(aij)n×n;

Step3按照2.2节方法确定MIE(一般情况下,CR和最大法和优化法确定的MIE是一致的,如例1和例2,但也可能存在不一致,此时应从优化结果和修改量两方面判断哪种方法更好,具体说明详见例3)。判断MIE是否存在,如果不存在,说明PCM中不存在基本回路,则转到Step5,进行数值一致性修正;否则,利用2.3节方法对MIE进行修正,假设修正后的矩阵为A*,令A=A*,进入下一步;
Step4判断逻辑一致性。如果修改后矩阵A*不能达到逻辑一致性,则返回Step2;否则,继续判断修改后矩阵A*的CR值是否小于0.1,即数值一致性是否满足,如果满足,则根据定义4,认为达到满意一致性,退出算法,输出最优解,如果不满足,则进入Step5;
Step5逻辑一致而数值不一致时的修正。利用文献[4]的边际优化法,实现最小改动情况下的数值一致,即对A中的元素进行小幅度微调,使得CR值降低到0.1以下。
3 实例分析
例1[6]已知5阶判断矩阵如下。

12345117/43/45/27/424/713/49/49/434/34/313/43/442/54/94/315/854/74/94/38/51
该PCM的CR=0.083<0.1,可见满足数值一致性,但是,我们对其进行基本矩阵分解,得到如表1所示结果。可见,其中存在4个基本回路S1~S4:1→4→3→1, 2→4→3→2, 2→5→3→2, 1→5→3→1,如图4所示。显然,根据定义6,MIL为基本回路1→4→3→1。下面分别利用两种方法确定MIE,并对PCM进行调整。
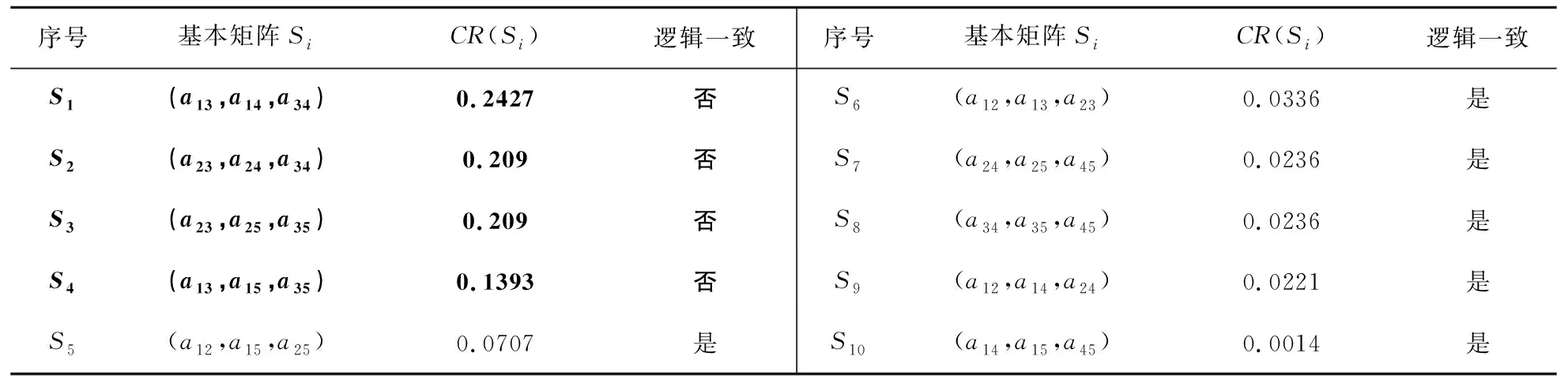
表1 基本矩阵分解(加粗项为不一致基本矩阵)
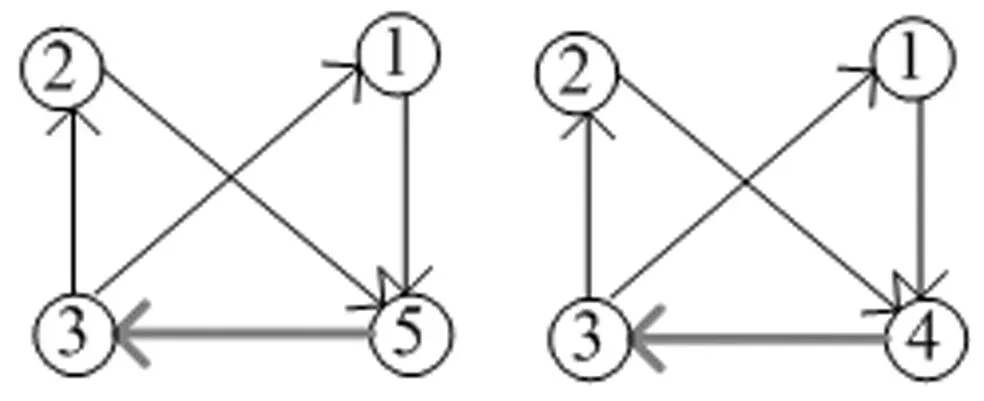
图4 4个基本回路
(1)方法一:按照2.2.1节方法确定MIE。由于只有S1~S4的CR>0.1,因此不一致基本矩阵即为4个基本回路。将基本回路中元素按照所在不一致基本矩阵的CR和由大到小进行排序,如表2所示,显然,按照CR和最大法,确定MIE为a34。
然后按照2.3节的优化模型,对a34进行修正,结果如表3和图5所示,可见,当a34修改为2.2561时,CR值由0.0829下降为0.0486,同时修正后PCM的基本回路由4个减少为2个。
表2 各元素的所有基本回路及CR总和

表3 按照CR和最大法确定的MIE及优化结果
接下来对修正后的PCM进行基本矩阵分解,如表4所示,可见,存在2个基本回路:, 2→5→3→2, 1→5→3→1。显然,MIL为2→5→3→2。
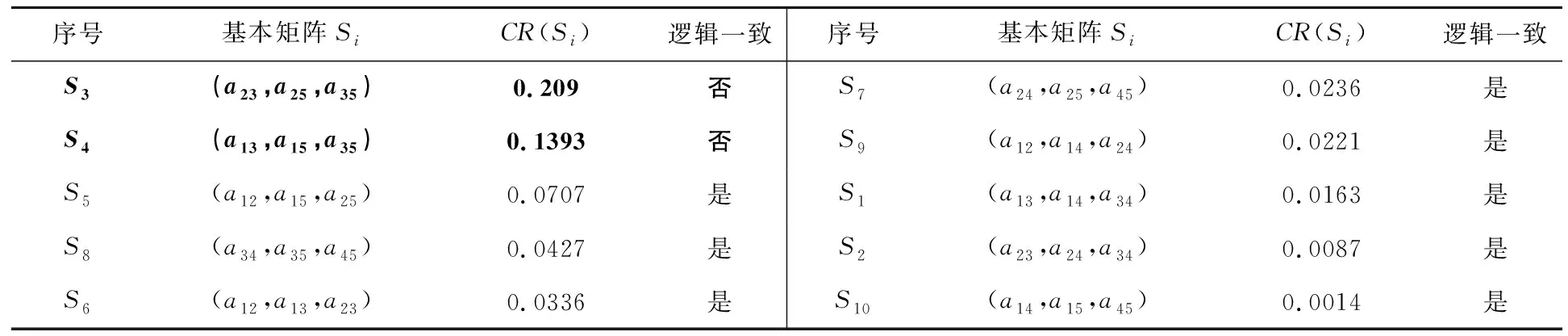
表4 基本矩阵分解(加粗项为不一致基本矩阵)
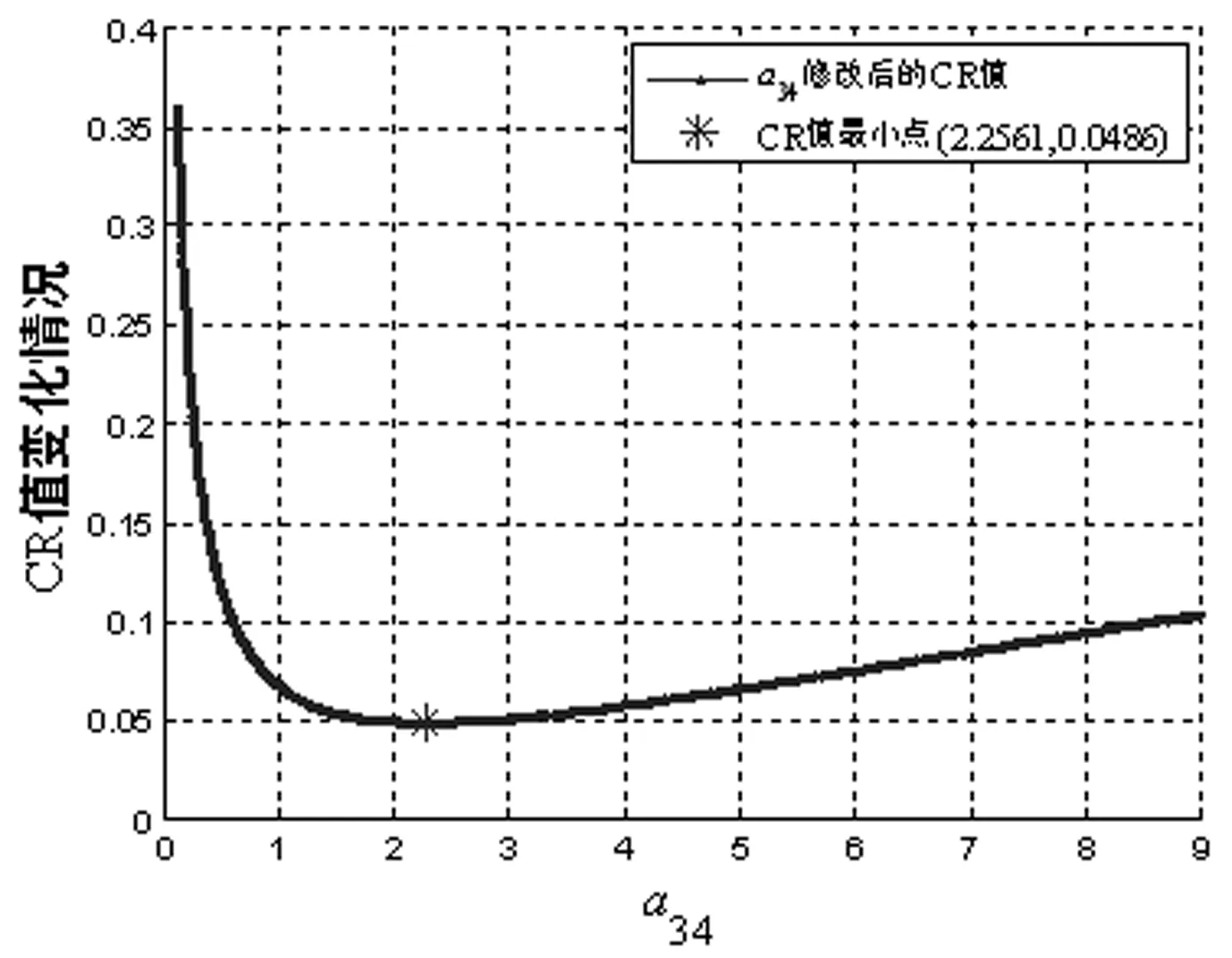
图5 CR值随a34的变化曲线
类似的,按照2.2.1节方法确定MIE,如表5所示,显然,a35对应的CR和最大,因此确定MIE为a35。
然后按照2.3节的优化模型,对a35进行修正,结果如表3和图6所示,可见,当a35修改为2.1521时,CR值由0.0486下降为0.0175,同时修正后PCM的基本回路由2个减少为0个,即修正后PCM同时满足逻辑一致性和数值一致性,找到最优解:修改a34=2.2561,a35=2.1521,此时CR=0.0175,满足一致性要求。
图7描述了基本矩阵S1~S10的CR值在MIE修改前后的变化情况,可见,在修改了a34后,基本回路S1,S2的CR值下降显著,其余基本矩阵CR值基本不变;当修改了a35后,基本回路S3,S4的CR值下降显著,此时,所有基本矩阵的CR值均低于0.1,整个PCM的一致性较好。
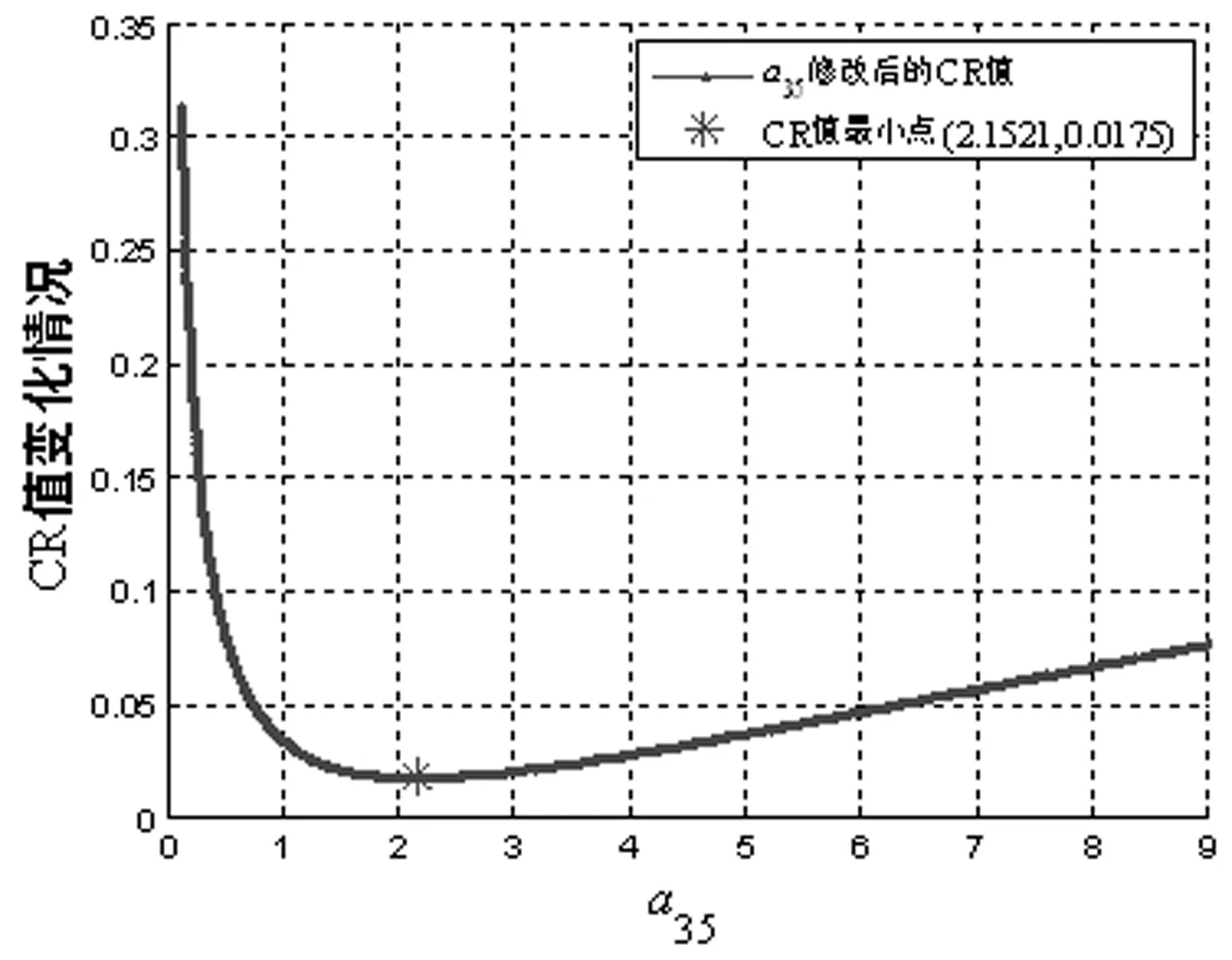
图6 CR值随a35的变化曲线
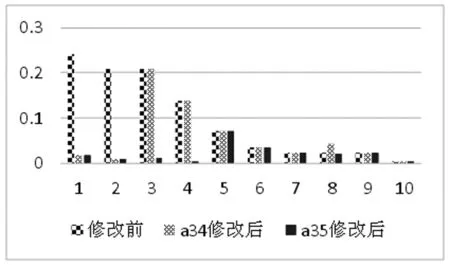
图7 基本矩阵CR值在MIE修改前后的变化情况
值得说明的是,从图7和表4可以看出,基本矩阵S8:(a34,a35,a45)在a34修改后由原来的0.0236增加到了0.0427,那么是否存在一种可能,即修改MIE后,某个基本矩阵(假设为S8)的CR值超过0.1?根据文献[6]的仿真实验结果,对于三阶判断矩阵(即这里的基本矩阵),CR<0.1时,依然是逻辑不一致的概率仅为0.63%,也就是说如果修改后基本矩阵的CR值增大为超过0.1,则极大可能性(99.37%)将使得该基本矩阵变为逻辑不一致,成为一个新的基本回路,这意味着修改MIE并没有使得整个PCM逻辑一致性得到改善,而是新增了一个三阶回路。对于CR和最大法,假如修改后S8的CR值大于0.1,则相当于a34修改后仍然在一个基本回路中,且包含a34的CR和仍然较大,这与CR和最大法的初衷是相违背的。对于优化法,修改MIE将使得PCM的CR值得到最大降低,一般来讲,优化法只可能减少三阶回路的数量(如果存在的话),这意味着不可能再新增新的基本回路。因此,修改MIE后,某个非基本回路的基本矩阵的CR值超过0.1的可能性是极低的。
(2)方法二:按照2.2.2节方法确定MIE。首先,由于MIL为基本回路1→4→3→1,则分别对MIL中三个元素a13,a14,a34按照式(3)进行优化,得到结果如表6和图8所示,显然,当a34修改为2.2561时,CR值由0.0829下降为0.0486,同时修正后PCM的基本回路由4个减少为2个,相比a13,a14的CR下降幅度最大,且能够使得整个PCM逻辑一致性得到改善(其中,a14的修改值未能改善逻辑不一致问题)。因此,确定MIE为a34。
接下来对修正后的PCM再次执行以上操作,找到MIL为基本回路2→5→3→2(参见表4),分别对MIL中三个元素a23,a25,a35按照式(3)进行优化,得到结果如表7和图9所示。
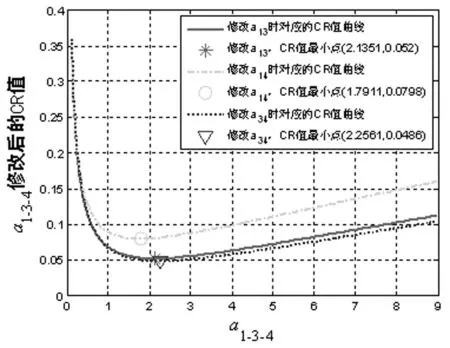
图8 回路(1-3- 4)中元素修改对应的CR值变化曲线
显然,当a35修改为2.1521时,CR值由0.0486下降为0.0175,同时修正后PCM的基本回路由2个减少为0个,相比a23,a25的CR下降幅度最大,且能够使得整个PCM逻辑一致性得到改善。因此,确定MIE为a35。由于修改a35后的判断矩阵同时满足逻辑一致性和数值一致性,即找到最优解:修改a34=2.2561,a35=2.1521,此时CR=0.0175,满足一致性要求。
综合分析以上两种方法,发现它们得出了相同的修正结果,这和我们在2.2节的分析结论是一致的:一般而言,两种方法结论是相同的,这是因为,基本回路由于逻辑不一致,其CR值往往也是最大的,这从表1和表4也可看出。
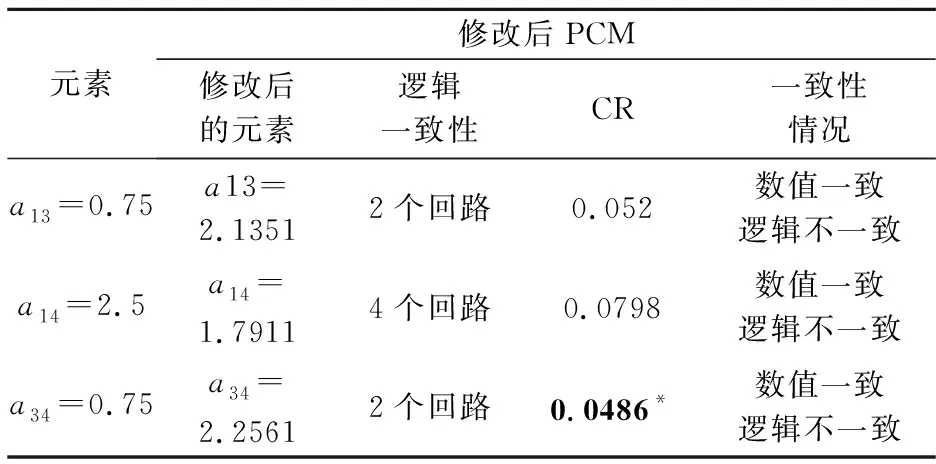
表6 MIL中元素的最优化值及其对应的CR值
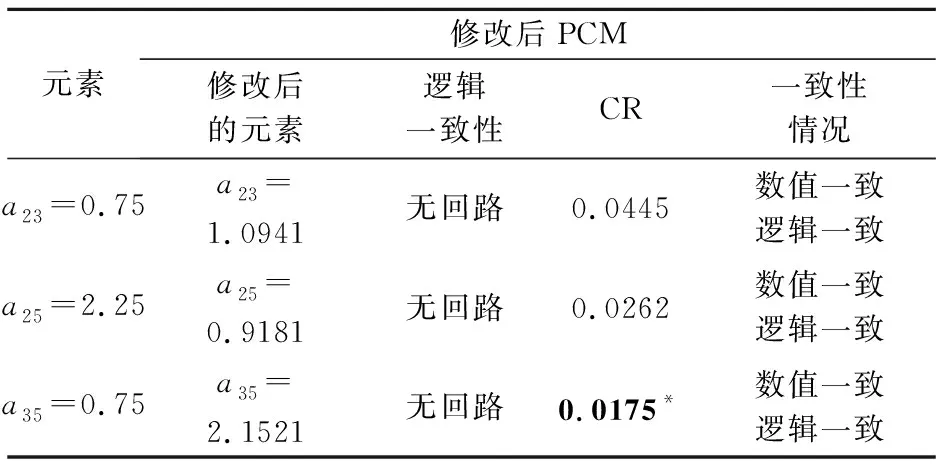
表7 MIL中元素的最优化值及其对应的CR值

图9 回路(2-3-5)中元素修改对应的CR值变化曲线
文献[6]的改进结果为:当修改a34=1/0.99,a35=1/0.99,此时的CR=0.055;当a34和a35都改成4/3时,CR=0.0371。将本文结果与文献[6]进行比较,如表8所示,可见本文方法得到了与文献[6]相同的调整反向方案,但是本文改进后判断矩阵的CR值更低,说明一致性更好。
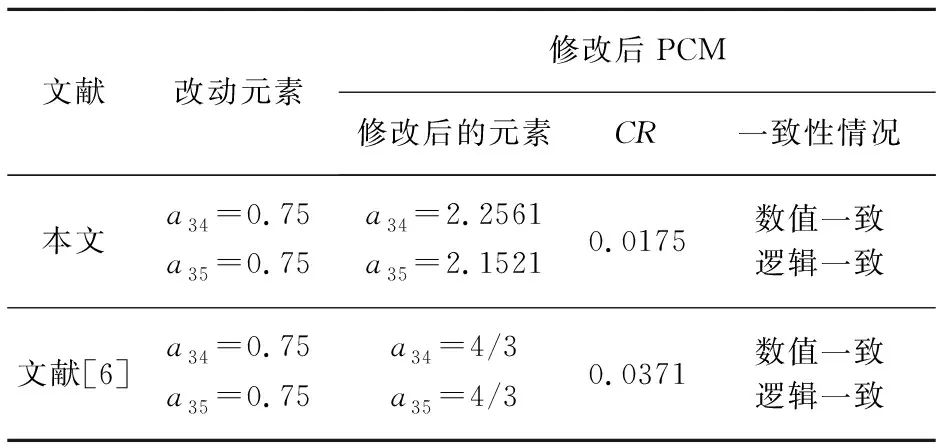
表8 一致性修正结果及与文献的对比
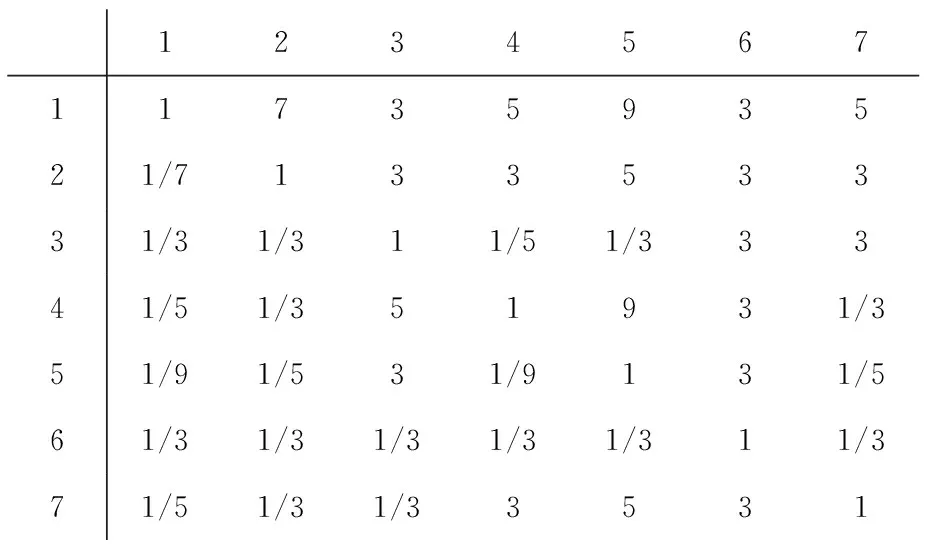
例2[2,3,12,13]已知8阶判断矩阵如下。
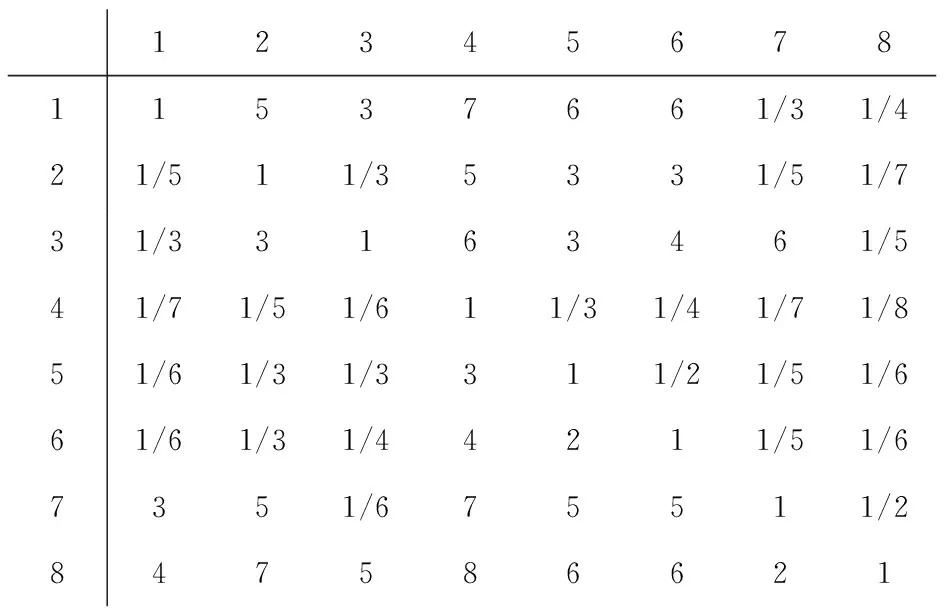
1234567811537661/31/421/511/35331/51/731/33163461/541/71/51/611/31/41/71/851/61/31/3311/21/51/661/61/31/44211/51/67351/675511/2847586621
该PCM的CR=0.1691>0.1,可见不满足数值一致性。同样,对其基本矩阵进行分析,共有56个基本矩阵(限于篇幅,这里不一一列出),其中只有一条基本回路:1→3→7→1,即S1=(a13,a17,a37),CR(S1)=1.9657。根据定义6,MIL为基本回路1→3→7→1。
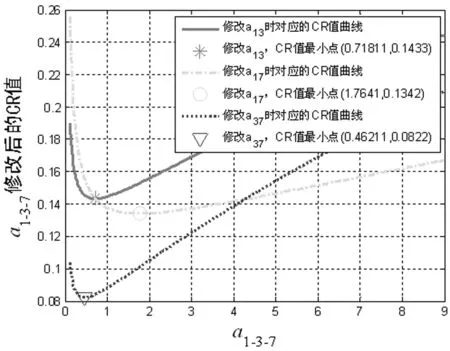
图10 回路(1-3-7)中元素修改对应的CR值变化曲线
(1)方法一:按照2.2.1节的方法确定MIE。首先提取基本回路中的所有元素,列出包含该元素的所有不一致基本矩阵的CR之和,其中a37出现在6个不一致基本矩阵中,CR总和为4.8627;其次是a17,出现在5个不一致基本矩阵中,CR总和为2.5824。显然,a37对应的CR和最大,因此确定MIE为a37。
然后按照2.3节的优化模型,对a37进行修正,当a37由原来的6修改为0.46211时,CR值由0.16909下降为0.0822,同时修正后PCM的基本回路由1个减少为0个,即修正后PCM同时满足逻辑一致性和数值一致性,找到最优解:修改a37=0.46211,此时CR=0.0822,满足一致性要求。
(2)方法二:按照2.2.2节方法确定MIE。首先,由于MIL为基本回路1→3→7→1,则分别对MIL中三个元素a13,a17,a37按照式(3)进行优化,得到结果如图10所示,显然,当a37修改为0.46211时,CR值由0.16909下降为0.0822,同时修正后PCM的基本回路由1个减少为0个,相比a13,a17的CR下降幅度最大,且能够使得整个PCM满足逻辑一致性。因此,确定MIE为a37。
由于修正后PCM同时满足逻辑一致性和数值一致性,即找到最优解:修改a37=0.46211。显然,该结果与方法一相同。
从例1和例2可以看出,不一致的基本矩阵,CR值必然较大,特别地,基本回路由于是逻辑不一致的,其CR值往往最大。若包含该元素的不一致基本矩阵的CR和越大,说明该元素最不一致。这是两种确定MIE方法能够得出相同结果的主要原因。但在少数情况下,比如数值不一致程度非常高时(即原始PCM的CR值过大),两种方法将可能得出不一致的结论,详见例3。

表9 一致性修正结果及与文献的对比
例3[14]已知7阶判断矩阵如下。
12345671173593521/713353331/31/311/51/33341/51/351931/351/91/531/9131/561/31/31/31/31/311/371/51/31/33531
将本文结果与文献[2,3,12,13]进行比较,如表9所示,文献[2,3]尽管进行了修正,使得CR值小于0.1,但是由于MIE元素a37并未进行反向改动(由大于1改为小于1),因此逻辑不一致依然存在。而文献[12,13]实现了一致性修正,但本文方法比文献[12]和[13]都要简单,易于计算机实现,结果精度更高。
该PCM的CR=0.30609>0.1,可见不满足数值一致性。同样,对其基本矩阵进行分析,共有35个基本矩阵,其中只有两条基本回路:3→4→7→3和3→5→7→3,即S1=(a34,a37,a47),S2=(a35,a37,a57),CR(S1)=1.7673,CR(S2)=1.7673。根据定义6,MIL为基本回路3→4→7→3和3→5→7→3。
(1)方法一:按照2.2.1节的方法确定MIE。计算过程与例1类似,这里直接给出结果,如表10所示。可见,经过5次迭代后,PCM达到了满意的一致性,找到最优解:修改a37=0.3591,a13=8.9991,a16=8.9991,a45=1.5401,a34=0.6541,此时CR=0.0983,满足一致性要求。
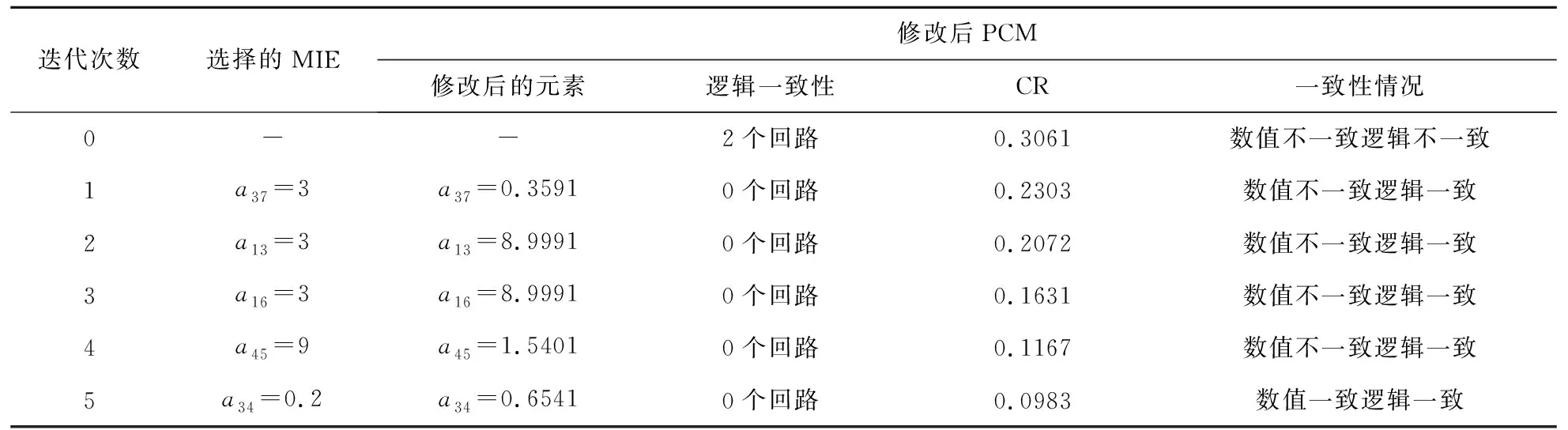
表10 按照CR和最大法确定的MIE及优化结果
(2)方法二:按照2.2.2节方法确定MIE。计算过程与例1类似,这里直接给出结果,如表11所示。

表11 MIL中元素的最优化值及其对应的最优CR值
当修改a37=0.3591后,此时已满足逻辑一致性要求,只需对其进行微调,使得数值一致即可。利用边际优化法进行微调[4](边际优化法的主要作用是通过元素的最小微调,实现CR<0.1的目标,主要解决数值不一致问题),得出优化后矩阵为:
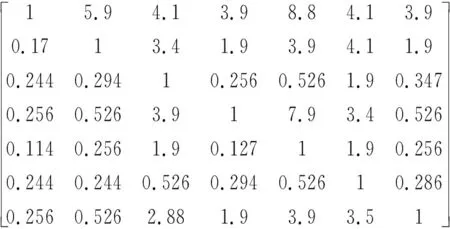
修改后矩阵的CR值为0.0951。
注意,例3中出现了两种方法对应结果不同的情况(方法一选出了5个MIE,方法二只选出1个MIE),这多出现于数值不一致问题非常突出的情形,也就是说,不一致主要由数值不一致引起,单纯修改逻辑不一致元素难以实现满意一致性。
利用文献[2]中的两个指标:总调整量ε和单项最大调整量σ,对PCM的修改量进行评价。对于方法一,修改后PCM的CR=0.0983,在不考虑反向的元素a37的情况下,根据式(1)和(2),算得ε=1.692,σ=7.4599(最大单项调整元素a45由9调整为1.5401);对于方法二,修改后PCM的CR=0.0951,在不考虑a37的情况下,ε=0.643,σ=1.1。两种修改方法对应的CR值均达到满意值(小于0.1),但方法二的各项调整量显然小一些,根据定义9,第二种方法的修改量是满足要求的,而方法一的修改量过大(总调整量ε>1,单项最大调整量σ>2,两个修改程度指标均不可接受)。通过比较两种方法,虽然都达到了逻辑和数值一致性,但方法二中对微调元素的修改量满足要求,方法一则微调过大,本例中应使用方法二。
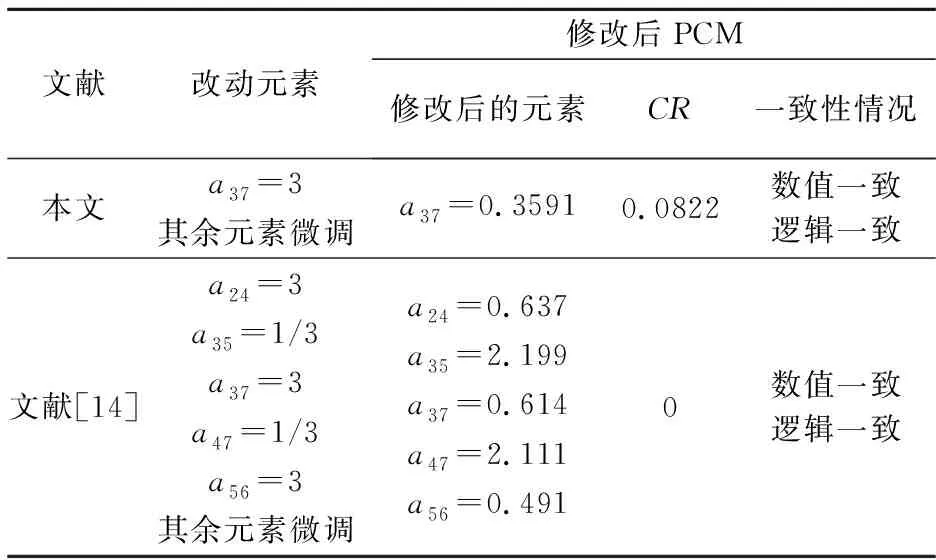
表12 一致性修正结果及与文献的对比
将本文结果与文献[14]进行比较,如表12所示,文献[14]方法的修改量显然过大,需要对5个元素进行反向,在不考虑反向元素的情况下,其余微调元素的调整量为ε=1.1671,σ=4.983(根据定义9,总调整量ε>1,单项最大调整量σ>2,认为修改量是不可接受),而本文仅需要对一个元素进行反向,在不考虑反向元素的情况下,其余微调元素的调整量可接受(ε=0.643,σ=1.1),显然要优于文献[14]。
对于例1~例3,利用本文给出的两种方法都可以实现一致性修正。那么是否可能存在用本文方法不能解决的情况呢?
(1)首先,逻辑不一致问题显然是可以通过对部分元素进行反向来解决的,根据图论的知识,三阶回路通过部分元素反向后可以全部消除[6],如例3中a37由3修改为0.3591,这用本文的两种方法都可以首先解决。
(2)其次,在逻辑一致的前提下,数值不一致问题一定可以通过优化法对各元素进行“微调”,使其CR值达到小于0.1。假设我们考虑最极端的情况,在不反向的情况下,如果允许元素在整个可行域[1/9,1]或[1,9]上进行修改,显然是可以实现的,但是可能的代价是“微调”的修改量过大,即不满足“总调整量ε<1,单项最大调整量σ<2”。
对此,笔者设计了例4进行说明。
例4已知4阶判断矩阵如下(为笔者随机生成)。
12341178221/715531/81/51641/21/51/61
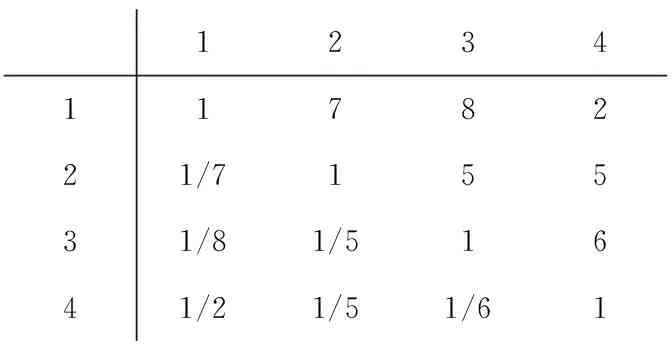
该PCM的CR=0.6356>0.1,可见不满足数值一致性。同样,对其基本矩阵进行分析,共有4个基本矩阵,均为数值不一致基本矩阵,如表13所示,由于不存在三阶回路,没有基本回路,即PCM是逻辑一致的。
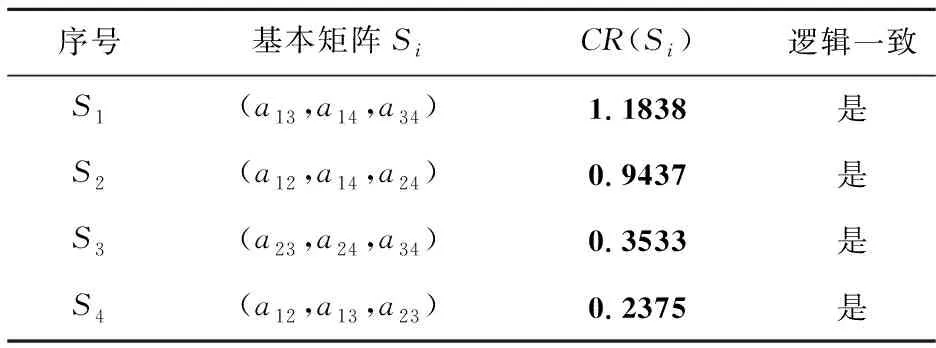
表13 基本矩阵分解(加粗项为不一致基本矩阵)
如例3中所述,对于数值不一致问题非常突出的情形(这里的CR达到0.6536,非常不一致),此时,不一致问题完全由数值不一致引起。此时,CR和最大法将不宜使用,因为此时不存在逻辑不一致元素,故不需要对元素反向,而CR和最大法的原理是在整个可行域上寻找最优,例如表10中a45由9调整为1.5401,往往导致PCM的总修改量非常大(比如表10单项最大调整量σ=7.4599),修改程度指标将不可接受。
对于优化法确定MIE,由于不存在基本回路,也就没有MIL,因此认为没有MIE。根据图3的决策步骤,直接利用边际优化法[4],得到修改后矩阵如下:
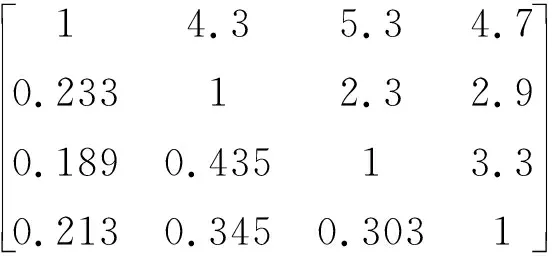
修改后矩阵的CR=0.0958<0.1,总调整量ε=1.6017,单项最大调整量σ=2.7,显然超出了可接受的修改程度。
这说明PCM的数值不一致性过大,用本文的两种方法都不能解决。此时,应建议决策者重新检查PCM,找出存在问题的元素进行修改后,再按照本文方法进行修正。
比如,根据表13,利用第2.2节的方法找到最不一致元素为a14,建议决策者进行修改。假设决策者将其修改为9,得到决策者修改后矩阵为:
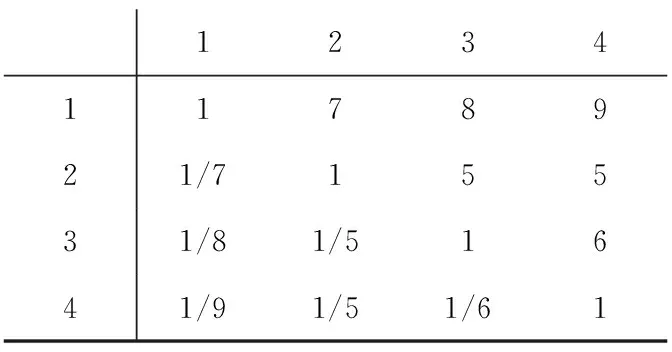
12341178921/715531/81/51641/91/51/61
再次利用第2.2节的方法,找到最不一致元素为a34,对a34按照2.3节模型进行优化,得到修改后结果为:
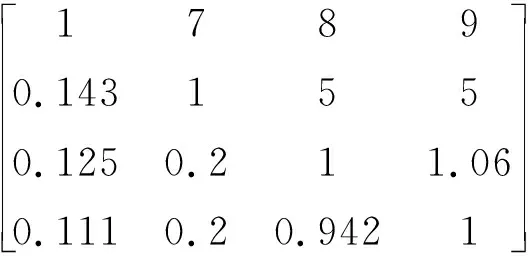
修改后矩阵的CR=0.098<0.1,此时数值和逻辑上均满足了一致性要求。注意到,此时a34由6修改为1.06,显然超过了“微调”允许的单项调整量,此时应将结果反馈给决策者,以征求其同意。
4 结语
本文从造成PCM不一致的基本单元,即基本回路入手,对AHP一致性调整的方法进行了研究。提出利用基本回路分析实现一致性修正,并设计了两种确定最不一致元素MIE的方法:CR和最大法和优化法。利用优化模型对MIE进行修正,从而实现对原始判断矩阵的一致性修正。对于修正后仍无法解决数值不一致的情况,借鉴文献[4]的边际优化法进一步优化,若边际优化法的修改量过大,则应考虑决策者参与进来,并建议其对最不一致基本矩阵或最不一致元素重点修改,然后再按照本文方法进行修正(具体可参考例4)。由于基本矩阵数量通常达到几十个,若手动分析比较则计算量过大,但本文方法的逻辑性强,方便利用编程实现,我们利用Matlab编程实现了算法,能够快速完成基本回路分析,MIE的选择和优化调整,计算结论准确、有效。通过与已有文献方法的对比,本文提出的算法能够有效解决AHP一致性调整问题(包括逻辑和数值一致性),且能够使得总调整量最小,从而保留尽可能多的原始比较信息。
下一步,可考虑基于基本回路分析思想在残缺判断矩阵、模糊判断矩阵等一致性调整方面的应用,同时,可针对群决策的一致性问题是否适用基本回路分析方法进行进一步研究。
猜你喜欢
公民与法治(2022年5期)2022-07-29
数学物理学报(2022年2期)2022-04-26
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
制导与引信(2016年3期)2016-03-20
