
基于超声波模块的四旋翼无人机在编队中的定位方法
2020-10-20 03:23栗乾瀚李泽阳李路昌
商情 2020年38期
关键词:无人机
栗乾瀚 李泽阳 李路昌

【摘要】在无人机进行编队飞行时,在领航-跟随的编队策略下,针对如何进行长机僚机之间的定位问题提出了超声波定位的解决方案。在建立的模型当中,进行了定位计算。可以使无人机在编队飞行当中以固定队形飞行。
【关键词】无人机;编队飞行;超声波定位
引言:四旋翼无人机是一种新型飞行器,从结构上来说,它是一种四轴给旋翼提供动力的飞行器。四旋翼飞行器的工作原理是飞行时调节电机旋转速度,带动桨叶转动,产生竖直向上的升力,使飞行器能够在空中处于一个平稳的飞行状态。相比于固定翼无人机来讲,四旋翼无人机有机械结构简单,飞行灵活,适合空中悬停和体积小等特点。相比单架无人机,多无人机编队更易于完成复杂任务,提高了容错率,使得编队飞行控制成为现下研究热门课题。使用超声波模块进行定位获得的数据精度较高,可达到厘米级,且结构简单。无论是在容错率高还是在续航,检修,控制等方面都有较大的优势。
1、编队策略
1.1 编队形式。飞行器的编队飞行就是两架及以上的四轴飞行器从任意的初始位置按照事先预定好的队形进行飞行,并且在飞行的过程中在各个飞行器之间的距离和高度保持初始的飞行状态。无人机的编队控制有多种方法,主要的控制方法有领航-跟随法,虚拟结果法,基于行为的方法。现在存在多种编队形式,但由于无人机搭载芯片的性能限制和无人机在空中飞行时所实时采集的姿态、位置等多种数据,为防止运算速度低下,实时运动改变不及时。采用地面基站—长机—僚机编队策略。即地面基站为机队提供飞行数据,目标坐标。长机为机队中的参照物,僚机检测自身位置,核对目标点,并进行自身的姿态调整。
1.2 长机僚机结构模型。在编队过程中,长机根据预先预定的航迹飞行,僚机的编队则是主要控制距离的控制过程。在水平面上,输出的指令信号都是关于速度和方向上的,通过反馈水平面双机的距离信息来实现跟踪距离控制的功能,在垂直面上,僚机根据高度的测量值来实现高度的控制。
2、定位方法
2.1应用测距原理。由于编队性质,采用单向一对一测距法。单向测距法中由应答器和主测距器组成,主测距器放置在被测物体上,在处理器的指令信号的作用下向位置固定的应答器发射同频率的无线电信号,应答器在收到无线电信号后同时向主测距器发射超声波信号,得到主测距器与各个应答器之间的距离。单向测距可以实现两点测距,当同时有三个或三个以上不在同一直线上的应答器做出回应时,就可以计算出被测物体所在的位置。在相同的测量距离下,反射式测距法空气对超声波吸收较单向测距法大,因此反射式测距范围较单向式测距范围小。若以测得距离,根据算法便可得到待测物体的位置,实现定位。这样就能实现一对多的控制。
2.2 领航机的定位。采用目视定位法,既人为控制领航机的位置和运动轨迹,使得机队能够以领航机为参考系进行编队飞行动作。从单对多转变成单对单的控制极大降低了控制成本,将更多的控制运算压力转移到各个跟随机上,减少了地面控制台的负担。
2.3 跟随机的定位
采用多点定位法,既在领航机上安装位置不同的四个超声波定位装置,跟随机上安装两个位置不同的超声波定位装置。根据不同传感器之间测得的距离参数,就能算出跟随机相对于领航机的空间位置参数。再将测得相对坐标和编队预定编队坐标比对,得出需要的飞行轨迹,再配合无人机姿态控制实时刷新纠正,保证编队稳定性和可靠性。
3、模拟仿真与结论推导
3.1 领航机参考系的建立
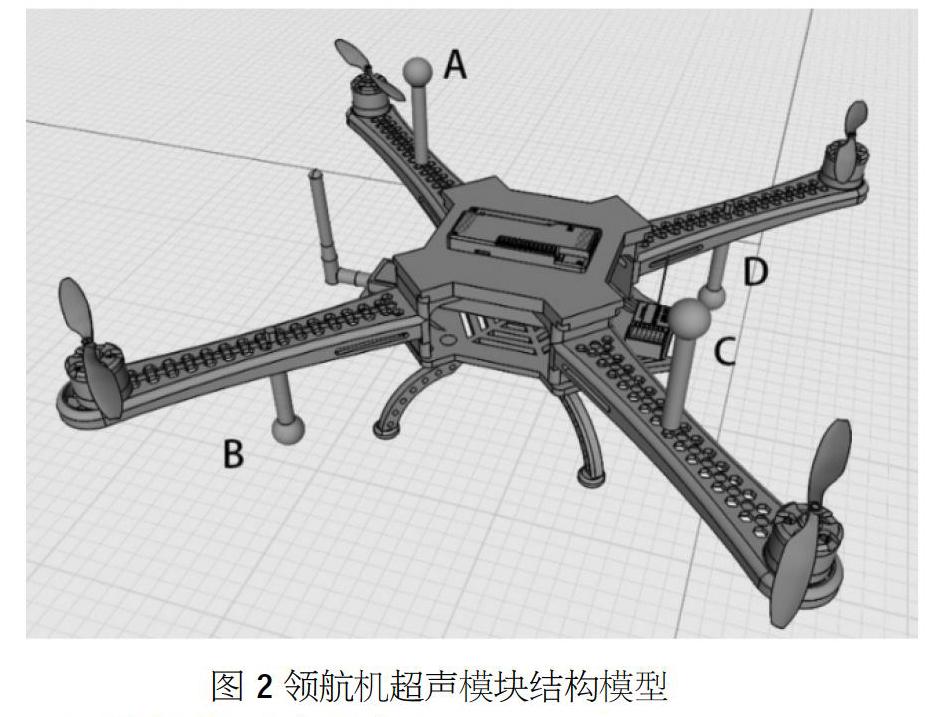
在无人机领航机上安装四个超声波测距模块,分别位于四个臂上,其距离机体臂横剖面中心均为200mm。两两一组分别位于机臂上下两侧,其分布方式如图所示。将其命名为ABCD。以机体臂为基准面,机体臂横剖面中心点为原点建立坐标系,就可以得到四个点的坐标A(-200,0,100) B(0,-200,-100) C(0,200,-100) D(200,0,100)。
3.2跟随机的坐标的确定
相比于领航机的超声波模块的安装方式,跟随机只需保留AC两个位置的模块即可,记作EF。通过E模块和F模块分别于ABCD进行测距运算即可实时得出本机的相对位置和飞行方向。
设EF在相对坐标系中的位置为E(x1,y1,z1)F(x2,y2,z2)解得:
E点:
F点同理。
姿态控制:
根据给定坐标和即时坐标,计算出在偏航,俯仰,横滚三个方向所需角度α,结合飞控调整姿态,以达到自动跟踪的目的。
4总结
目前研究的成果如下:
超声波的距离测量工作:
通过时间差定位,计时从超声波发射超声波开始,遇到障碍物时反射超声波,接收器接收到立即停止计时,从开始到结束的时间差是波传播的时间。障碍物和超声波发射器之间的距离根据超声波在空气中的传播速度和时间来确定。超声波在空气中的传播速度受到温度的影响较大,在计算过程中需要对温度的影响进行考虑。温度和速度的计算公式可以近似看作:
其中c为超声波在空气中的传播速度,一般取值为340m/s, t为发射和接收超声波的时间差。
协同飞行的工作模拟:
这次采用的是长机-僚机的模式,即地面基站为机队提供飞行数据、目标坐标。长机为机队中的参照物,僚机检测自身位置,核对目标点,并进行自身的姿态调整。运用超声波测距的原理,通过空间直角坐标系的建立,在理论上确定四旋翼无人机编队的定位控制方法。根据领航机和跟随机上不同传感器之间测得的距离参数,计算出跟随机相对于领航机的空间位置参数,与预定空间坐标进行对比,从而达到对无人机编队的调整和控制。
参考文献:
[1]郭勇,汪大伟,邓宇.四旋翼飞行器建模及其运动控制[J].传感器与微系统,2017,36(11):38-41.
[2]傅君,刘子龙.基于视觉的四旋翼室内悬停与定位控制[J].软件导刊,2018,17(10):144-147+152.
[3]周慧,宋义.一种基于Matalb的四旋翼飞行器姿态控制设计与仿真[J].科技资讯,2016,14(20):62+64.
基金项目:中国民航大学大学生创新创业项目(项目名称:多旋翼无人机编队动态飞行,项目编号:IEYCAUC2019223)。
作者簡介:栗乾瀚(1999-),男,本科在读,研究方向:飞行器动力工程。李泽阳(1999-),男,本科在读,研究方向:飞行器动力工程。李路昌(1999-),男,本科在读,研究方向:飞行器制造工程。
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
