新型苎麻剥麻机反拉脱骨装置设计与试验
——基于PLC
2020-10-19 06:42朱炯光郭克君满大为
农机化研究 2020年8期
朱炯光,郭克君,满大为,苏 宁
(1.国家林业和草原局哈尔滨林业机械研究所,哈尔滨 150086;2.南京林业大学,南京 210037;3. 中国林业科学研究院,北京 100091;4.国家林业和草原局林业装备工程技术研究中心,哈尔滨 150086)
0 引言
苎麻(Boehmeria Nivea (L.) Gaudich.)为荨麻科植物,属多年生宿根性草本作物,在国际上被称为“中国草”,是一种重要的韧皮纤维作物,可用于服装、装饰用品、工业用线、降落伞绳及农作物覆盖等[1-2]。栽麻1次,可收获多年,一般年收3次,且必须经过剥制才能获得粗制的纤维。目前,苎麻的剥制基本是手工刮麻,作业成本高(原麻4~5元/kg),用工占整个苎麻生产过程的60%以上[3]。因此,发展苎麻剥制加工机械化是提高苎麻收剥效率、降低人工劳动程度及生产成本的重要措施。
新型苎麻剥麻机可以实现对苎麻杆条的自动去骨和剥皮,且其反拉脱骨装置不粉碎麻骨,不仅减少人工作业量,高效利用资源,而且麻骨还可以被用于抗菌培养基[4]。为此,进行了新型苎麻剥麻机反拉脱骨装置的设计和试验。
1 苎麻剥麻机结构和原理
1.1 结构
反拉式新型苎麻剥麻机主要由劈麻部分和反拉部分组成。其中,劈麻部分由输送机构、导向机构、喂入机构、压紧机构及劈麻机构组成[5];反拉部分由夹麻装置、伺服电机、滚珠丝杠、齿条滑块导轨、Z轴组件及PLC控制系统组成,如图1所示。
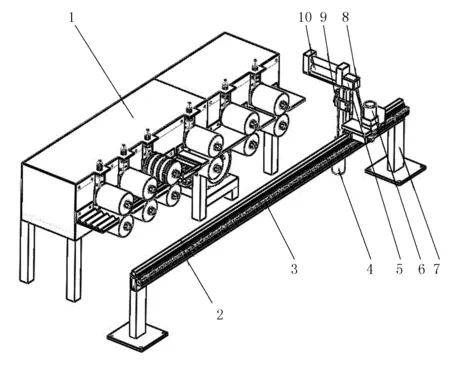
1.劈麻部分 2.反拉部分 3.导轨 4.400w伺服电机 5.200w伺服电机 6.400W伺服电机 7.反拉机架 8.Z轴组件 9.滚珠丝杠 10.夹麻装置图1 反拉脱骨装置的结构原理图Fig.1 Schematic diagram of the structure of the anti-bone bone device。
1.2 工作原理
苎麻秆条喂入劈麻部分后,沿轴线被单侧劈开,并被转动胶辊压平,其上方是麻骨,下方是麻皮。待苎麻秆条传送到夹麻装置处,通过夹麻口触碰到行程开关,行程开关是常开的,碰后闭合,传出信号给PLC;PLC开始运行,先夹麻,再垂直下拉将麻骨折断,与麻条分离,到垂直下限位后开始反拉;反拉到给定限位距离后,松开麻条,麻条掉落,夹麻装置返回原点,进行下一轮反拉。
2 控制系统的设计
反拉式新型苎麻剥麻机采用了PLC伺服控制,通过夹麻装置处的行程开关传递启动信号,接近开关传递限位信号;经PLC控制系统进行运行速度及距离的计算控制后发出高频脉冲,由伺服电机驱动器接收高频脉冲控制伺服电机转动,采用触控屏对夹麻和反拉的速度和距离等参数进行设定,从而实现对反拉速度和距离的精确调控。
2.1 控制系统硬件组成
剥麻机控制系统主要由 PLC 主控制器、触控显示屏、夹麻信号传感器、反拉限位检测传感器、夹麻、下拉及反拉伺服电机等组成。
2.1.1 主控制器
反拉式新型苎麻剥麻机控制系统采用了三菱FX2n-24MT型PLC作为控制核心。FX2n系列是小型PLC系列,为一体式结构。
FX2n-24MT型PLC具有8k的程序储存空间,有12个输入点与12个输出点,可输出4路100kHZ高速脉冲信号,同时对多个伺服电机进行控制,能够达到控制的速度要求;采用DC24V供电,晶体管输出(适应于高频动作,响应时间短)。DVP-RS232型通讯模块是 PLC 控制器与触控屏的连接纽带,提供 RS-232通讯方式,最高支持 38 400bps 传输速率,且各通讯口均采用光耦隔离,具有较强的抗干扰能力。A / D 转换模块、D / A 转换模块是 PLC 控制器常用的输入输出模块,能够解决对不同传感器等元件数字模拟信号的输入输出要求。
2.1.2 触控屏与交互界面
反拉式新型苎麻剥麻机控制系统采用 8寸的英威腾触控屏作为显示操作屏幕,型号为invt GD20-2R2G-4,通过 RS232 通讯方式与 PLC 主控制器进行通讯。针对苎麻剥麻机设计了剥麻操控交互系统,包含操作画面、状态显示及参数设置等交互界面,如图2 所示。

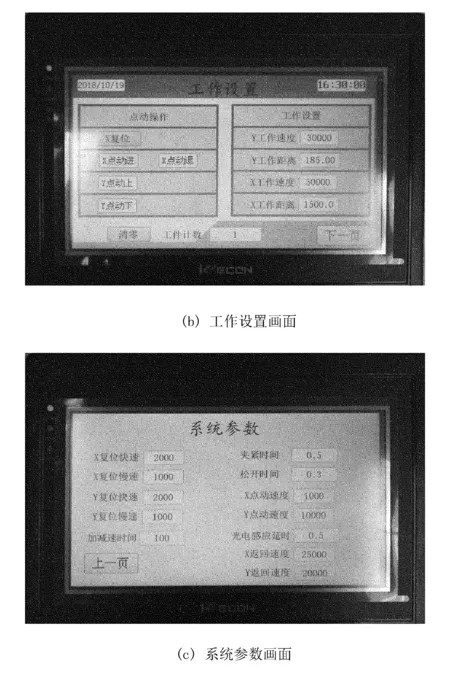
图2 触控屏操控界面Fig.2 Touch screen control interface。
通过触控屏,可以对反拉的距离和速度、响应脉冲频率、夹持时间等关键参数进行设置。另外,该系统配置有数据存储功能,可将实验数据实时存储在 USB 存储介质中。
2.1.3 传感器
采用限位开关传感器对夹麻位置进行检测。传感器在夹具的后面,安装位置如图3所示。


图3 限位开关传感器Fig.3 limit switch sensor。
具体参数如下:操动形式为铰链滚轮长杠杆型,操作速度为0.01~1mm/s;动作频率为240次/min;接点电阻1MΩ,绝缘电阻大于等于100MΩ;耐电压,非连续端子间1000VAC、50/60Hz持续1min,载电流与地间2000VAC、50/60Hz持续1min;周围温度-25~80℃;湿度85%RH以上;使用寿命20 000 000次以上。
2.1.4 伺服电机系统
共有3台伺服电机,其中2台是60st-M01330 400W B系列伺服电机,用来控制夹麻装置垂直升降和水平左右运动。垂直升降的伺服电机有抱闸装置,其他参数相同。具体参数:电压规格AC220V,额定输出为400W,额定转矩为1.274N·m,额定转速为3000 r/min,编码器为2500线增量式编码器。另1台是MHMF022L1U2M松下伺服电机,用来控制夹麻装置夹麻。具体参数:电压规格200V,额定输出200W,额定电流1.4A,无保持制动器,额定转矩0.64N·m,额定转速为3 000r/min,编码器规格为23 bit绝对式/增量式系统。
2.2 控制软件设计
控制软件使用GX work2软件编程,采用梯形图指令来完成。
2.2.1 控制流程
控制系统分为自动模式与手动调整模式两大部分:自动模式下,喂入苎麻条后,经过劈麻麻条呈扁平状,由滚锟压着苎麻条继续向前送,穿过夹具后触碰到限位开关,开始夹麻进行反拉动作,动作完成后夹麻装置返回原点,等待下次反拉;手动调整模式是对自动模式的优化,由于苎麻条的径向直径在10~20mm之间,长度也不统一,因此需要手动对夹具的速度和反拉的距离和速度进行调控。其控制流程如图4 所示。

图4 控制流程图Fig.4 Control flow chart。
2.2.2 关键参数
1)升降动作伺服电机的脉冲数和转速计算。根据60st-M01330 400w B系列伺服电机的参数,可知
(1)
(2)
P总=Pc×c
(3)
式中Pc—负载轴转1圈的指令脉冲数(p);
L—负载轴1转的移动量(mm),由于是伺服电机直连滚珠丝杠结构,1次移动量即为滚珠丝杠的节距8mm;
ΔL—1个指令脉冲移动量,0.001mm;
c— 移动节距数(个)。
预计最大移动总距离200mm,可得Pc=8000p,c=25,P总=200000p。
(4)
(5)
式中i—电子齿轮比,作用是调节电机转速,直连时i减=1;
Pt—编码器分辨率,Pt=10 000p/r;
f—输入脉冲频率100kHz;
n—预计最大转速(r/min)。



3 试验
2018年 10 月,在山东临沂东方五金厂制作了反拉式新型苎麻剥麻机的样机,并从江西汾宜运来苎麻秆条进行试验。试验现场图如图5所示。


图5 反拉式新型苎麻剥麻机的试验Fig.5 Test of a new type of pull-back ramie stripping machine。
为检测不同的距离和速度对夹麻反拉效果的影响,采用 5种不同速度进行了试验。检测剥麻成功率时,以苎麻皮脱离麻骨的程度来算,试验统计结果如表1、表2所示。
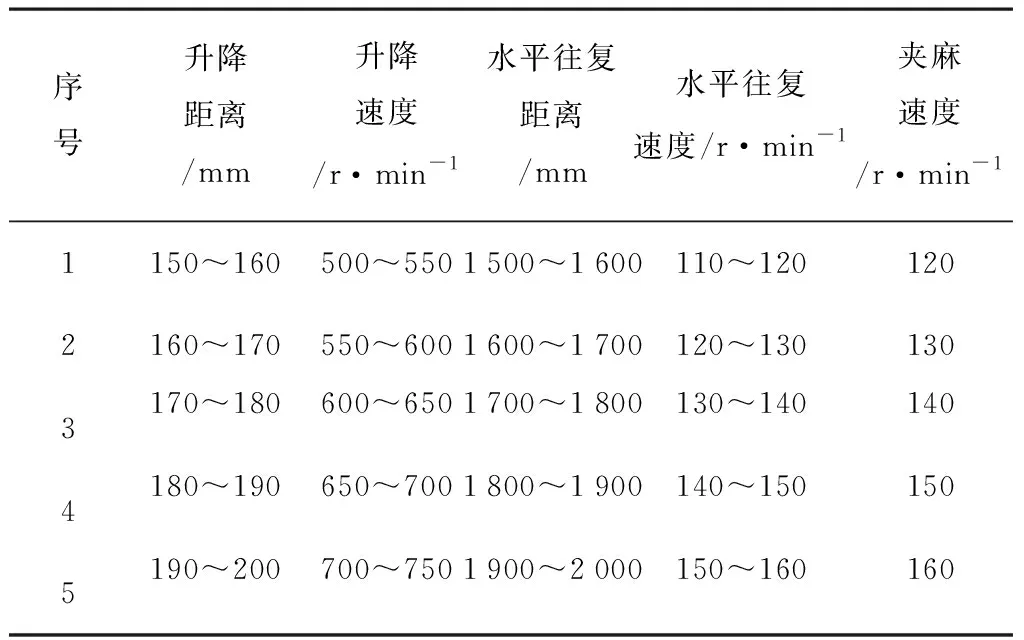
表1 反拉式苎麻剥麻机作业试验参数Table 1 Test parameters of the pull-back type ramie stripping machine。

表2 不同长度麻条在不同参数下的剥麻成功率Table 2 The success rate of stripping of different lengths of hemp under different parameters。
由表2可知:总体成功率均在80%以上,基本能实现剥麻需求。剥麻成功率受麻条长度、升降距离、水平往复速度影响较大,呈正相关性。麻条长度为1 000~1 100mm时,在第1类试验参数下,达到最大成功率95%。麻条长度为1 100~1 200mm时,在第2类试验参数下,达到最大成功率95%。同类别参数中选最大参数,则成功率较高。
水平往复距离远大于麻条长度,对剥麻成功率影响较小,固定设定为1 800mm。为保证响应速度,夹麻速度固定设为最大值160r/min。
4 结论
1)设计了新型苎麻剥麻机反拉脱骨装置,建立了基于 PLC 的伺服控制系统。该控制系统采用传感器对喂入麻条头部进行检测,配置可调整速度、高度及升降控制频率等参数的触控显示屏,以PLC 为主控制器,通过脉冲控制升降与旋切伺服电机,实现自动反拉,同时可实现对反拉剥麻运行参数的监控及数据存储。
2)剥麻试验表明:采用反拉式剥麻更为可靠稳定,验证了剥麻成功率与麻条长度、升降距离、水平往复速度呈正相关性。在相关性高的试验参数下,剥麻成功率可达到95%,满足剥麻作业要求。
猜你喜欢
当代水产(2022年6期)2022-06-29
中国生殖健康(2020年8期)2021-01-18
微特电机(2020年11期)2020-12-30
中国生殖健康(2018年3期)2018-11-06
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
动物营养学报(2017年2期)2017-02-28
工业设计(2016年6期)2016-04-17
中国麻业科学(2015年5期)2015-12-28
中国麻业科学(2015年5期)2015-12-28