半自动组合式大葱移栽机的设计与研究
2020-10-19 06:42:34张吉强李天华牛子孺李广华王后新侯加林
农机化研究 2020年8期
张吉强,李天华,牛子孺,李广华,王后新,侯加林
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018;2.山东省园艺机械与装备重点实验室, 山东 泰安; 3.青州华龙机械技术研发有限公司,山东 潍坊 262500)
0 引言
葱在人们的日常生活中必不可少,是厨房中不可或缺的调味品之一。大葱因含有丰富的维生素和矿物质,也被誉为“蔬菜之王”[1]。我国的大葱种植面积和产量均居世界前列,但种植过程中用工量大、劳动强度高、效率低,机械化种植水平低,大部分地区还需要人工种植[2]。国外大葱移栽机主要集中在日本,机型分为两类:一类是日本久保田公司生产的KN-P6大葱移栽机,结构简单,自走在已开好的垄沟内,但效率较低,仅在0.013~0.02 hm2/h之间;另一类是丰收公司生产OP290/2100大葱移栽机,结构较为复杂,基本实现了大葱栽植的自动化,效率较高,缺点是栽植深度和株距调节范围小、价格高且适应性差,不合适我国大葱种植的国情[3-4]。
为此,结合国内大葱种植模式,同时借鉴国外的先进技术[5],设计了半自动组合式大葱移栽机,并进行了相关试验,以期解决国内大葱栽植难题。
1 移栽机结构组成及工作原理
1.1 总体结构
半自动组合式大葱移栽机主要由机架、起垄旋耕装置、减速器、变速箱、栽植变速箱、水平摆苗装置、竖直夹苗装置、直立栽苗装置及覆土镇压轮等组成,如图1所示,主要性能参数如表1所示。

1.起垄旋耕装置 2.减速器 3.变速箱 4.人工座椅 5.栽变速箱 6.水平摆苗装置 7.葱苗存放盘 8.覆土镇压轮 9.直立栽苗装置 10.竖直夹苗装置 11.开沟器 12.传动链图1 半自动组合式大葱移栽机总体结构图Fig.1 Overall structure of semi-automatic combined spring onion transplante。
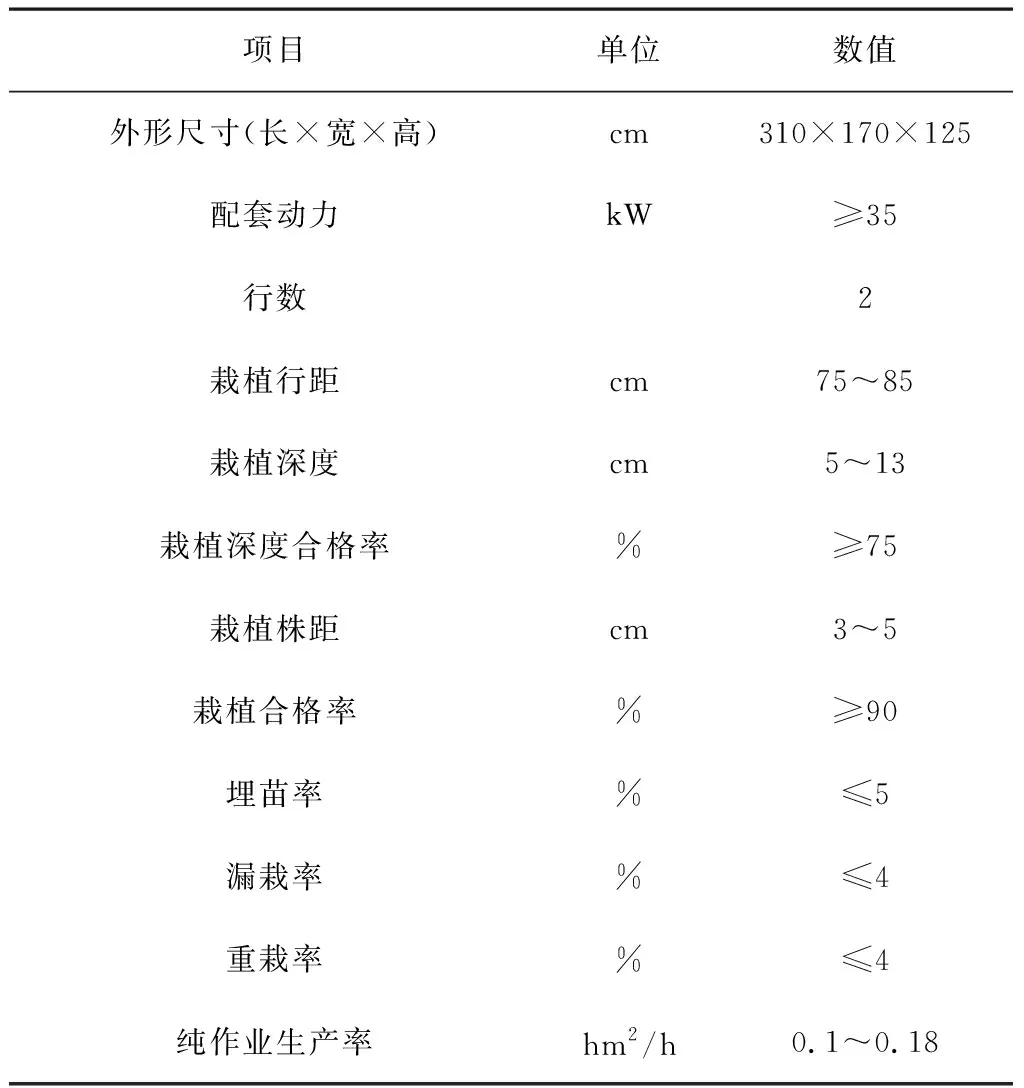
表1 半自动组合式大葱移栽机的主要性能参数Table 1 Main performance parameters of semi automatic combination spring onion transplanter。
1.2 工作原理
机具与35 kW以上的拖拉机配套使用,拖拉机的动力输出轴经万向节带动减速器[6-7],由减速器输出端的主动链轮通过链条带动旋耕刀主轴和旋耕刀转动旋耕土壤,由开沟器进行开沟和起垄。
人工将葱苗放入水平摆苗装置的输送带上, 相邻两个限位凸起间放1根葱苗,由栽植变速箱带动水平摆苗装置输送带及从动轴转动;从动轴在轴承的内圈内转动,配合从动轴上的被动转辊对输送带起到支撑张紧作用;葱苗经水平摆苗装置输出端输送至竖直夹苗装置内,并沿竖向输送至直立栽苗装置的两挠性圆盘之间,由位于支架一侧的驱动轴通过齿轮传动连接栽植轴,通过圆锥直齿轮和圆柱直齿轮与栽植轴完成动力的传输;由栽植轴带动弹性滚轮夹持装置转动,弹性滚轮将夹有葱苗的挠性圆盘夹紧并进行转动,葱苗由水平运动转为绕挠性圆盘中心的旋转运动;在葱苗与地面垂直时,挠性圆盘张开,葱苗在重力作用下落到栽植沟内,最后由覆土镇压装置将回土流压实,完成栽植过程。
2 关键部件设计与参数确定
2.1 机械传动设计
半自动组合式大葱移栽机的系统结构及组成如图2所示。工作时,其动力输入轴与拖拉机输出轴连接,由输入轴连接减速器工作,由减速器的第1输出轴通过链轮链条传动带动旋耕机主轴和旋耕刀转动进行旋耕,由减速器第2输出轴通过变速箱和双排链轮传动带动栽植变速箱工作。栽植变速箱共分布5个输出转辊和1个栽植轴,第1输出转辊和第3输出转辊分别连接两竖直夹苗输送带的主动轴,第2输出转辊和第4输出转辊分别连接两竖直夹苗输送带的被动轴,由第5输出转辊作为水平摆苗装置的主动轴,由栽植轴为直立栽苗装置提供动力输入。栽植变速箱结构示意图如图3所示。

图2 系统结构及组成Fig.2 System structure and composition。

1.第1输出转辊 2.第2输出转辊 3.第3输出转辊 4.栽植轴 5.第5输出转辊 6.第6输出转辊图3 栽植变速箱结构示意图Fig.3 Schematic diagram of transmission structure planted。
2.2 水平摆苗装置设计
为了解决人工摆苗的随机性问题及减轻整机质量,设计了水平摆苗装置。水平摆苗装置采用等间距的限位凸起设计,保证了放入后的葱苗间距相等,克服了人工摆苗的随机性;同时,输送带间隔板上分布42个减轻孔,在达到隔离输送带目的的同时减轻了间隔板质量,最大程度上减轻了整机质量。另外,设有张紧装置,可以使水平输送带产生一定的预紧力,防止水平输送带在被动转辊上打滑,同时控制输送带挠度,以减小输送阻力。
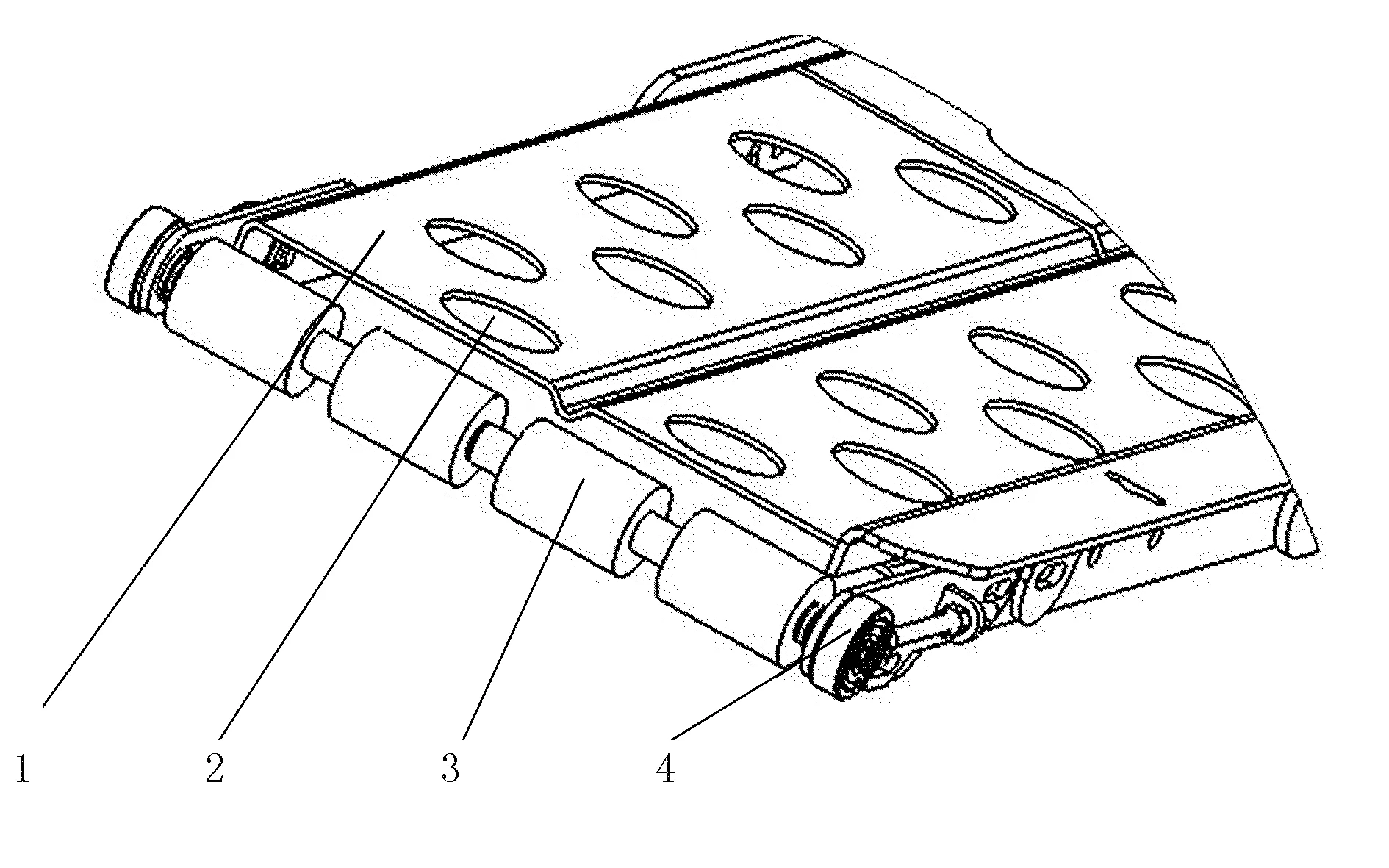
水平摆苗装置主要由输送带、主动轴、被动转辊、张紧装置、限位凸起和间隔板等6部分组成,如图4所示。水平摆苗装置的动力输入由栽植变速箱的第5输出转辊提供,从动轴安装在水平摆苗装置的输出端,在从动轴的首尾两端各安装有60000-2RS深沟球轴承。从动轴采用阶梯轴设计,最大直径为12mm,最小直径为8mm,且从动轴上均布4个转辊,转辊外圈直径为28mm,转辊结构图如图5所示。深沟球轴承外圈设有六角螺母C级M5,利用张紧杆调节深沟球轴承及从动轴在调节孔道内的位置,来实现对输送带的张紧。间隔板位于机架的中间位置,主要作用是隔离上下水平输送带,上面分布42个减轻孔,孔径为44mm,设置贯穿孔的目的是减轻间隔板质量。输送带采用柔性PVC材质,可降低葱苗在传输过程中的损伤率,两限位凸起截面形状为倒梯字型,上底为20mm,下底为30 mm,上底到下底的垂直高度为15mm,此截面形状尺寸设计可满足我国大部分地区葱苗直径的种植农艺要求。

1.从动轴 2.张紧杆 3.固定板 4.输送带 5.限位凸起 6.主动轴 7.机架 8.张紧螺母 9.调节孔道图4 水平摆苗装置结构示意图Fig.4 Schematic diagram of the horizontal swinging device。
1.间隔板 2.减轻孔 3.被动转辊 4.轴承图5 水平摆苗装置结构局部示意图Fig.5 Local structure diagram of horizontal pendulum seedling device。
葱苗茎秆的运动是水平输送带运动和机器前进运动的合成,运动轨迹方程为
(1)
式中Va—水平输送带传输速度(m/s);
Vb—机器前进速度(m/s)。
由式(1)可以看出:葱苗茎秆的运动轨迹是一条斜率为Vb/Va的直线。在实际摆苗作业中,机器前进速度与水平输送带的速度的比值会影响输葱苗茎秆的运动轨迹。
2.3 直立栽苗装置的设计
直立栽苗装置作为移栽机的关键部件,其性能要求如下:能够实现高密度栽植、高直立度栽植和较低的葱苗漏栽率。其中,栽植株距为3~5cm,直立度达到75%以上,漏栽率≤4%。
直立栽苗装置由机架、挠性圆盘、栽植轴、限位叉、弹性滚轮夹持装置和栽植轴等组成,如图6所示。工作时,由位于机架一侧的栽植轴为直立栽苗装置提供动力输入,通过齿轮传动连接挠性圆盘轴,齿轮传动部分包括直齿圆柱齿轮(GB/Z 18620.2-2002)和圆锥齿轮(GB11365-89);由挠性圆盘轴带动弹性滚轮夹持装置转动,且分别通过固定座安装在两个挠性圆盘的外侧;限位叉起支撑挠性圆盘的作用,防止其在作业过程中跑偏。
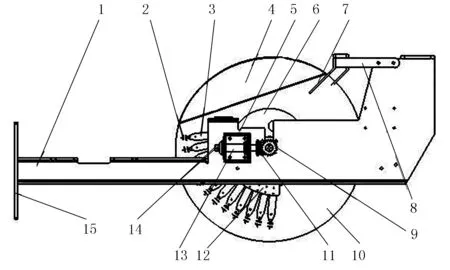
1.机架 2.挠性圆盘 3.弹性滚轮支架 4.弹性滚轮 5.轴承支撑座 6.固定盘 7.限位叉 8.支撑架 9.圆柱直齿轮 10.挠性圆盘轴 11.圆锥直齿轮 12.弹性滚轮夹持装置 13.栽植轴 14.轴承 15.固定板图6 直立栽苗装置结构示意图Fig.6 Schematic diagram of the structure of the erect seedling device。
2.3.1 确定葱苗茎秆上各点的运动轨迹方程
作业时,圆性挠盘在绕自身传动轴作圆周运动的同时,沿机组做水平移动的匀速转动,因此圆性挠盘栽苗的运动是机组水平移动运动和自身圆周运动的合运动。由于葱苗各点距圆性挠盘中心的长度不同,所以葱苗各点的运动轨迹和速度是不同的。葱苗茎秆上各点的运动轨迹方程为
(2)
M=dω/v
(3)
式中v—牵引装置拖拉机的前进速度(m/s);
ω—圆性挠盘转动的角速度(rad/s);
t—时间(s);
D—圆盘中心距沟底的高度(m);
d—葱苗各点距挠盘中心线的距离(m);
M—特征参数。
2.3.2 零速度栽苗分析
直立栽苗装置要达到零速度栽苗的要求,即直立栽苗装置在投苗时的水平速度Vx=0。
将式(1)葱苗上各点的运动轨迹方程对时间t求导,可得直立栽苗装置在水平和垂直方向的速度分量Vx、Vy为
(4)
对于直立栽苗装置,葱苗上最多只有1点的绝对速度为零,在绝对速度为零的位置落下才能够保证最大的直立度。葱苗体在长度方向的速度解析图如图7所示。

图7 葱苗体在长度方向的速度解析图Fig.7 Velocity analysis of onion seedling body in the direction of length。
2.3.3 弹性滚轮夹持装置的设计
弹性滚轮夹持装置作为直立栽苗装置中的关键部件,其工作状态直接影响葱苗夹持点和释放点位置,继而影响葱苗直立度。因此,弹性滚轮夹持装置的设计是确保葱苗直立栽植的关键一步,主要由固定座、弹性滚轮支架和弹性滚轮等3部分组成,如图8所示。其固定座采用圆弧形状设计,并在一端设有与固定盘固定的固定支架,固定座上固定有沿固定盘径向均布设置的滚轮支架,共12个,其弹性滚轮支架与地面的夹角β=8°,如图9所示。滚轮支架的端部安装有可在挠性圆盘表面滚动的弹性滚轮,弹性滚轮采用柔性橡胶材质。

1.固定座 2.弹性滚轮 3.弹性滚轮支架图8 弹性滚轮夹持装置结构示意图Fig.8 Structure diagram of elastic roller clamping device。
图9 弹性滚轮支架与水平地面的夹角示意图Fig.9 Diagram of the Angle between the elastic roller support and the horizontal floor。
3 样机性能试验及分析
3.1 试验目的
对大葱移栽机进行性能及生产指标考核试验,验证大葱移栽机在正常情况下的作业效果,以及样机在本地区是否具有先进性、是否符合本地区大葱种植农艺要求。
3.2 试验基本条件
田间性能试验在山东农业大学南校区大葱试验田进行。试验地属于一年两熟地区,土壤为壤土,年平均降水量500mm左右,粘度适中;坚实度247.5×104Pa,土壤含水率9.3%(0~5 cm)、11.7%(5~10cm)[8-9]。试验地平整,覆土严实,能够满足试验要求。
采用高度L=250mm、直径D=10mm的葱苗,质量在30~40g,一次试验移栽40棵葱苗,每组试验重复3次;分别记录每次试验所用的时间、大葱移栽的总株数、栽植深度、埋苗和伤苗的个数等相关数据。
在整机行进速度为0.2km/h的情况下,主要对栽植深度合格率、埋苗率、伤苗率和纯作业生产率4个技术指标进行测试[10-13],结果如表2所示。

表2 测试结果Table 2 Test results。
试验过程中,整机运转平稳可靠,关键功能部件能够有效完成开沟、起垄、移栽和覆土镇压作业,工作过程协调稳定,能够实现各项作业功能。移栽机在试验过程中还发现存在以下问题:
1)在开沟起垄过程中,由于设置有较深的旋耕深度,因此旋耕刀所受阻力较大,旋耕刀面强度需要提高。在接下来的优化设计中,应该深入分析旋耕刀的工作参数,提高其结构强度,同时在保证葱苗栽植质量的前提下采用较大功率的拖拉机进行牵引工作。
2)在进行葱苗摆放时,需要3~4人进行人工将葱苗摆放到水平摆苗装上,人工强度较大且效率低。解决的办法是设计装置能够实现自动将葱苗从存放盘摆放到水平摆苗装置上,从而节省劳动力,降低栽植费用。
3)直立栽苗装置进行栽苗时,圆性挠盘会不定时出现左右摆动的情况,影响栽苗直立度和栽植深度,解决的方案是在圆性挠盘上侧加一个桁架固定在机架上。
4 结论
1)根据国内大葱的栽植模式,设计出了半自动组合式大葱移栽机,可一次栽植2行,能够同时实现旋耕、开沟、起垄、移栽和镇压等功能。
2)针对配套动力轮距与大葱种植垄距不匹配的问题,在原方案的基础上增加旋耕开沟起垄机,使开沟起垄机与移栽机于一体,成功解决了配套动力轮距与垄距不匹配的问题。
3)葱苗水平输送采用带有等间距槽型的柔性PVC带,垂直输送带采用小间距槽型具有柔性的PU带,这两种输送带有力保证了葱苗无损伤等距输送,满足栽植等株距、不倒伏、高垂直度等指标要求。
猜你喜欢
吉林蔬菜(2022年3期)2022-11-16 12:28:33
学苑创造·B版(2022年2期)2022-01-28 12:46:16
农机化研究(2020年12期)2020-10-19 01:54:06
今日农业(2018年2期)2018-01-16 08:47:30
制造技术与机床(2017年3期)2017-06-23 08:11:51
制造技术与机床(2017年3期)2017-06-23 08:11:25
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
机械工程师(2014年9期)2014-07-08 02:15:56
制造业自动化(2013年1期)2013-08-22 07:34:44
科技创新与品牌(2013年5期)2013-04-29 21:06:08