基于光电子信息处理的智能灌溉监控系统研究
2020-10-19 06:42韩洪杰
农机化研究 2020年8期
钱 彬,韩洪杰
(河北能源职业技术学院,河北 唐山 063000)
0 引言
我国是农业大国,农业用水量巨大;但是我国的水资源匮乏,农业方面的可用水量占我国淡水总量的75%,水资源利用率仅为45%,远低于发达国家的75%~80%的用水率[1-2]。目前,我国仍然有很多的地区采用人工控制灌水阀进行漫灌,一方面土地湿度与农作物不匹配,另一方面一旦忘记关阀门,将会造成经济损失和水资源的极大浪费。因此,可以依托发展的计算机和信息技术,将传统的灌溉方式转变为智能灌溉控制方式[3-4]。
智能灌溉监控系统结合了计算机技术、信息技术、无线传感网络技术等[5-6],采用多个传感器节点监测灌溉用水量,自动开启和关闭阀门,实现智能节水灌溉。通过远程监控系统对农田灌溉区域进行实时监控,根据监控结果实时调节水量,既能保证农田的灌溉效率,提高水资源利用率,进而提高农作物产量,而且还能降低灌溉成本。因此,研究智能灌溉监控系统具有重要意义。
光电子技术集合了微电子技术、光伏技术、蓄电池等技术,可以实现光能和电能的转换。目前,光电子技术在医疗、通信、农业等领域均有较广泛的应用。通过光电子技术将光能转化为电能,可为灌溉系统提供能量,多余电量还可输出电网。在目前节能减排的环境下,该技术成为解决能源危机的一种手段[7]。本文将光电子技术应用于智能灌溉监控系统,既可实现能源的充分利用,又可实现灌溉系统智能控制和远程监控。
1 硬件设计
1.1 总体结构
智能灌溉监控系统的总体设计方案如下:①系统的主要组成为数据采集模块、中央控制中心、光伏电池、用户界面模块和执行模块;②系统采用无线传感网实现数据的采集、传输及对智能灌溉系统的实时监控;③系统的各模块所使用的电能通过光伏电池提供。系统的总体结构流程图如图1所示。
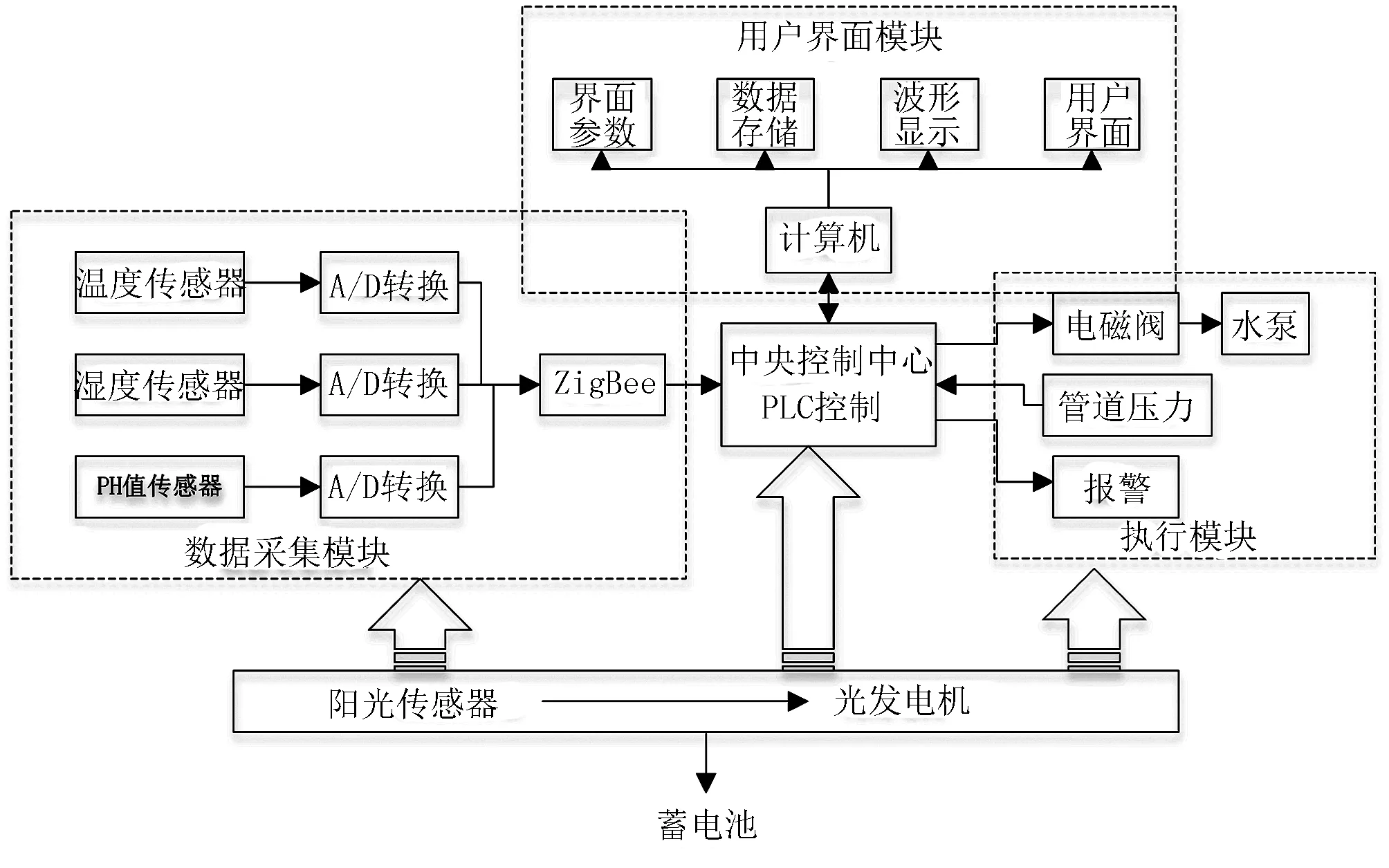
图1 智能灌溉监控系统总结结构流程图。
1.2 光伏电池
光伏电池由阳光传感器、光收发机和蓄电池组成,通过光电子技术将光能转化为电能。阳光传感器用于跟踪太阳光线,随着时间的变化,太阳的光照角度、光照强度不断变化,阳光传感器则负责捕捉光照信号,使电池充电效率保持最高;光收发机则用于将光能抓换为电能;蓄电池采用24节电池串联,一方面将电能输出,另一方面用于储存多余电量,在无光照时将储存的电量释放供电。
电池组的电压为24V,但阳光传感器电路电压为12V电压,数据采集模块为5V电压,为满足负载电压要求,需要对电路进行降压。电路设计均采用降压电源控制器控制,其电路如图2所示。

图2 降压电路电路图。
1.3 数据采集模块
数据采集模块由采集温度、湿度和pH值传感器、ZigBee无线传感网、A/D转换器组成。其中,温湿度和pH值传感器节点负责采集土壤区域的温湿度和pH值。由于采集到的数据不可识别,需要A/D转换器将接收到的数据转化为可识别值,再通过网络传递。ZigBee无线传感网具有成本低、能耗低、复杂度低且可以双向传递数据的优点[8],因此作为该智能灌溉监控系统的数据传输方式。
1.4 执行模块
执行模块由电磁阀、阀门及水泵组成,用于进行自动灌溉。中央控制中心向执行模块下达是否灌溉的指令,通过继电器控制水泵的电磁阀阀门。电磁阀电路图如图3所示。通电时,继电器闭合,此时电磁阀开始工作,灌溉系统启动灌溉;断电时,继电器处于断路状态,此时电磁阀停止工作,灌溉系统停止灌溉。

图3 电磁阀电路图。
1.5 用户界面模块
用户界面模块集界面参数、数据存储、波形显示和计算机于一体,计算机接收到土壤数据后,实时显示数据变化趋势,并自动存储以便随时查看历史数据。
1.6 中央控制中心
中央控制中心是智能灌溉监控系统的核心,主要由PLC进行控制。对采集到的数据和设定值进行比较,将分析结果传达给执行模块,执行是否灌溉的指令;用户界面实时显示数据和分析结果,以达到智能灌溉和实时监控的目的。
2 软件设计
可靠的数据传输是保证智能灌溉系统实时监控的前提。一般无线传感网络的数据传输采用等间隔的Huffman算法进行数据传输,但该算法在数据传递时由于较多的采集点导致汇聚点数据过多而发生碰撞,能量消耗过多;在数据存储时,存在相似的冗余数据,造成存储空间的浪费。因此,采用非均匀间隔的Huffman算法进行数据传递。
本算法以温度和湿度的控制作为研究对象,首先利用多阈值判断的方法去除环境中的冗余数据,再利用Huffman算法进行压缩,从而得到压缩后的环境信息。这样既保证了数据传输的正确性,又保证了数据发送量最小,降低能耗。算法的步骤如下:
1)处理温度数据。以T为周期采集温度数据,并设定初始温度变化极限的阀值为ΔTmax,计算相邻时刻采集到的温度差,则
ΔT=|T(t)-T(t-1)|


2)处理湿度数据。湿度计算方法与温度计算方法近似。以T为湿度采集周期,设置初始温度变化阀值ΔHmax,计算t时刻和(t-1)时刻温度差ΔH,则
ΔH=|H(t)-H(t-1)|

3)统计字符频率。将需要压缩的一帧数据输入缓冲区,整体扫描,统计数据帧中的n个字符出现的频率。
4)构件霍尔夫曼树。确定n个字符的权重,根据权重构造n棵二叉树,规定最小权重的二叉树根节点分别为0和1,并分别与其相邻两棵树构造新的二叉树,其根节点值分别为子树的权重和,原来的子树则自动删除。以该方法重复构造二叉树,直到只剩下1棵树时,即为霍尔夫曼树。原来的子树成为树上的叶子,并按照删除顺序形成0、1序列代码。
5)发送编码。将对应叶子的编码输入缓冲区。
6)解压缩。将压缩后的数据帧编码发送至服务器后,通过读取编码表,可以重建霍尔夫曼数,解压缩后即可得到原始数据。该算法的总体流程如图4所示。
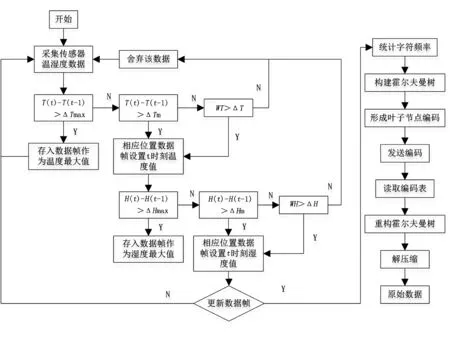
图4 非均匀间隔的Huffman算法总体流程图。
3 试验
3.1 充电分析试验
试验选择在春季9:00-16:00的时间段,测试光线强度并对数据进行统计。电池的初始电压为40V,测试光伏电池电压。由于阳光传感器和数据采集模块的电路电压要求不同,因此测试同时段的各处电压。测试结果如表1所示。

表1 光线强度和各处电压值。
由表1可知:随光线强度的增加,电池电压升高,电量除供给系统工作,多余电量储存在蓄电池;下午时,光线强度降低,产生电量降低,电压充电速度较慢,至15:00电池充电完成。阳光传感器和数据采集模块电路的电压始终能够维持恒定,说明电池能够为电路提供恒定电压。
3.2 监控试验
选择1块30m×30m的方形农田,对其进行灌溉和监控试验,测试时间为9:00-16:00。设置当湿度低于40%时,灌溉系统自动启动;湿度达到55%时,则灌溉系统自动停止。人工测试农田温度、湿度和pH值,并与传感器传输给用户界面模块的数据结果对比,结果如表2所示。

表2 人工测试与数据传递结果对比。

续表2。
由表2可知:人工测试结果和传输结果的误差很小,温度的最大误差为0.5℃,湿度的最大误差为2%,pH值的最大误差为0.5。这说明,系统可以实现数据的完整传输,能够满足对智能灌溉系统的监控。
4 结论
1)针对智能灌溉监控系统进行了设计,系统的主要组成为数据采集模块、中央控制中心、光伏电池、用户界面模块和执行模块。
2)通过光电子技术实现灌溉和系统能源的供给,通过非均匀间隔的Huffman算法进行数据的传输,实现对灌溉系统的监控。
3)试验结果表明:光伏电池可以为系统提供稳定的电压,监控系统能够完成灌溉数据的实时传输,保证对灌溉的实时监控。
猜你喜欢
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
科学大众(2021年21期)2022-01-18
小学科学(学生版)(2021年12期)2021-12-31
云南农业(2021年10期)2021-10-22
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
云南农业(2021年3期)2021-04-24
湖北农机化(2020年4期)2020-07-24
电子制作(2018年23期)2018-12-26