采摘机器人AGV控制系统研究
——基于云平台分布式远程监控技术
2020-10-19 06:42冯亚丽张玉华
农机化研究 2020年8期
冯亚丽,李 敏,张玉华
(漯河食品职业学院 信息工程系,河南 漯河 462300)
0 引言
云计算是基于互联网的相关服务的增加、使用和交付模式,通常涉及通过互联网来提供动态易扩展且虚拟化的资源。随着云计算、 物联网等新一代信息技术的发展,云平台技术被应用到各种领域。云平台采用分布式存储方式和并行计算,可以有效提高计算资源的利用率,通过资源的共享降低计算和存储资源的成本。在采摘机器人自主作业的过程中,为了提高远程监测视频采集和处理的效率、提高定位导航的效率和精度,可以将云平台分布式技术引入到控制系统中,对于提高采摘机器人的自动化作业水平具有重要的意义。
1 基于云平台和AGV控制的定位导航和远程监测系统
采摘机器人作业过程中属于无人化作业,其自主定位导航过程需要对大量的环境信息进行采集和识别,这就离不开实时监控系统。实时监测系统基于云平台可以对海量的信息进行存储,并进行实时处理,包括目标的智能识别和追踪,以实现采摘机器人的自主定位和导航,最终完成路径的规划。在视频处理方面,云平台技术可以实时进行转码,保证了低宽带下的图像质量和传输的实时性,对于采摘机器人的远程监测具有重要的作用。
自动导引车(Automated Guided Vehicle)是一种使用在先进生产线的一种引导设备,如将其使用在采摘机器人引导设备上,可以有效提高采摘机器人的定位导航效率和精度。
为了提高采摘机器人的自动定位和导航效率,采用自动引导装置AGV系统对采摘机器人的自主行走系统进行设计,如图1所示。具体流程如下:首先,对采摘环境进行采集,采集过程采用前端摄像设备;然后,将视频传送到云平台系统进行实时存储和处理,将处理信息传送给AGV调度控制器;AGV设备通过无线接入点收到控制信息后,执行定位导航任务。

图1 基于云平台和AGV调度的自动引导车控制系统Fig.1 The Automatic Guided Vehicle Control System Based on Cloud Platform and AGV Scheduling。
2 基于云平台分布式远程监控技术的采摘机器人AGV控制系统
为了实现采摘机器人的远程监控,前端视频采集设备的设计非常重要,视频采集设备按照功能和用途大致可以分为3种类型,包括模拟摄像机、RTSP协议的网络摄像机及第三方平台。为了实现不同采集设备接入系统的兼容性,在设计接入端口时应该采取不同的措施,使前端方便接入本地平台,实现前端采集设备的管理和控制,如图2所示。

图2 远程监控视频采集模块Fig.2 The Video Acquisition Module of Remote Monitoring。
采用不同的协议方式可以将3种不同的采集设备接入系统,其中模拟摄像机和网络摄像机均采用RTSP协议,其他第三方平台采用SDK协议。视频采集完成后需要对视频进行处理,为了实现海量视频数据的存储,采用了基于云平台的分布式计算和存储服务器,并在Jobkeeper的综合调度下完成视频的实时处理,其基本框架结构如图3所示。
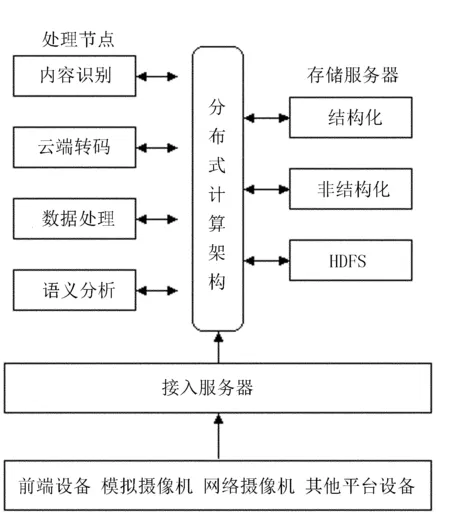
图3 基于云平台的分布式存储模块Fig.3 The Distributed Storage Module Based on Cloud Platform。
基于云平台的分布式模块可以实现存储服务器集群和处理服务器并行处理采集到的信息,视频信息可以实时保存到存储节点上,分布式服务器集群具有海量视频数据的存储能力,可以将采集和处理后的视频进行长期保存,并输出视频。基于云平台的分布式远程系统输出的视频为RTSP视频流,利用流媒体服务器对外提供服务,其框架如图4所示。

图4 视频数据输出系统Fig.4 The Output System of Video Data。
图4中,将采用流媒体分发系统可以对视频进行输出,输出网络一般分为两种:一是专用网络;二是公共网络。专用网络包括PC客户端、移动手机店和电视墙,对于PC机和电视墙,此类需求一般为高清码流,因此可以采用专用的局域网来布设网络。
云平台逻辑架构示意图如图5所示。图5中,采摘机器人AGV系统采用基于云计算的模式,利用海量分布式JobKeeper云调度架构,以集群的形式共同对外服务,最后将采集或者处理后的信息以流媒体的形式发放到应用终端。

图5 云平台逻辑架构示意图Fig.5 The Logical Architecture Diagram of Cloud Platform。
1)资源层:资源层主要是由前端设备构成,包括各种视频采集设备,还包括采集得到的原始视频数据信息等。
2)接入层:接入层主要是对视频数据业务进行整合,将不同的采集设备和视频资源,按照统一的标准接入平台。
3)数据存储层:数据存储层利用分布式存储原理,可以提供海量的存储空间,支持视频的回放和处理。
4)数据处理层:数据处理层利用分布式计算原理,可以提供高效的视频内容识别、转码和压缩处理等。
5)数据分发:视频数据处理完成后可以按照流媒体的形式进行分发,以供客户进行浏览和查阅,云平台提供高并发访问。
6)API层:提供API接口,支持各层次资源的相互访问,提供业务技术支持和开发。
7)调度控制层:主要负责整个平台的调度任务,以实现各层次之间协同工作。
8)应用层:应用层为用户提供可视化界面,可以方便地让用户进行视频的浏览、查阅和识别等操作。
3 采摘机器人远程监测AGV控制系统测试
为了实现采摘机器人自动引导车的自主行走,最重要的是前端采集设备对采摘环境进行识别,以规划自主行走路线,接入服务器中的视频信息,按照功能的不同可以划分为数据流和信息流,如图6所示。
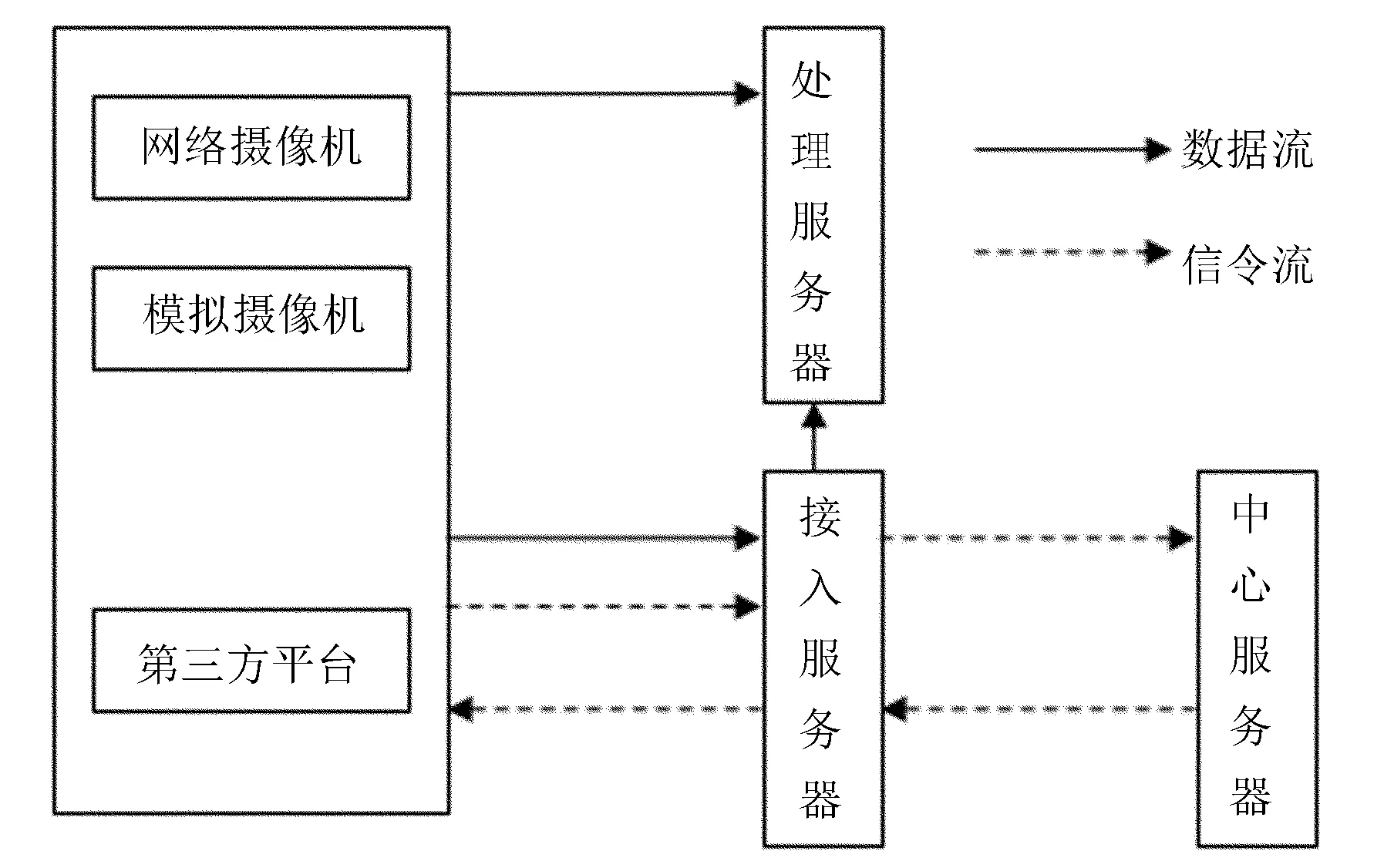
图6 视频采集系统框架图Fig.6 The Framework of Video Acquisition System。
为了降低前端摄像机的负担,视频流不会直接发送到流媒体服务器,而是先接入平台,以方便不同的客户对同一路流的访问。通过采摘环境的采集和云平台服务器的路线识别,采摘机器人自动引导AGV系统可以进行路径规划,从而实现自主行走,行走路线还可以在GIS地图上实时显示,远程监控系统根据采摘机器人的作业情况进行合理的调度。
AGV采摘机器人有引导车作为载体,在进行编队和调度时,可以由引导车进行自主导航,远程系统根据引导车设备的实时位置,进行合理的调度和规划,如图7所示。为了验证远程监控系统和AGV控制系统对采摘机器人的作业效果的影响,并测试监测和控制系统的可靠性,分别对监测控制系统的通信误差和控制精度进行了测算,并将使用和不适用监测控制系统的作业情况进行了对比。通信误差和控制精度的测试结果如表1所示。
图7 AGV采摘机器人自动引导设备监控调度系统Fig.7 The monitoring and dispatching system of AGV Picking robot automatic guidance equipment。

表1 通信误差和控制精度统计结果Table 1 Statistical results of communication error and control accuracy。
通过多次测试的统计结果可以看出:采用远程监测和控制系统的通信误差较低,最大误差按丢包率计算不超过0.5%,采摘机器人自动引导车的导航精度在95%以上,满足采摘机器人自动引导设备的设计需求。
表2为使用和不使用远程监测和AGV控制系统得到的采摘机器人定位导航效率的对比结果。由表2可以看出:采用远程监测和控制系统的采摘机器人导航效率较高,从而验证了方案的可行性。

表2 定位导航效率对比Table 2 The efficiency comparison of location and navigation。
4 结论
为了提高采摘机器人自动定位导航效率和精度,提高远程监测视频采集、处理和传输的效率,将云平台分布式技术和AGV控制系统引入到了采摘机器人的设计上,通过提高视频的转码、识别效率,有效提高了监测和控制系统的效率,解决了流媒体服务器负载过重、容灾能力弱及扩展能力弱等缺点。对系统的通信误差和控制精度进行了测试,结果表明:系统的通信误差较小,控制精度较高,可以满足采摘机器人远程系统的设计需求。最后,对定位导航效率进行了测试,结果表明:基于云平台分布式技术的AGV控制系统定位导航效率较高,对于采摘机器人自动控制系统的设计具有重要的作用。
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
成都信息工程大学学报(2021年6期)2021-02-12
学生天地(2018年19期)2018-09-07
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
雷达与对抗(2015年3期)2015-12-09
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28