
履带拖拉机双功率流转向装置动态仿真—基于图像处理和模拟软件
2020-10-17 01:02张定国
农机化研究 2020年5期
张定国
(四川交通技师学院 信息工程系,成都 611130)
0 引言
双功率流转向机构是一种新型的转向机构,在国外的大中型履带式拖拉机、装甲车和推土机上已经得到了广泛的应用。双功率流转向机构将发动机的功率流分成两路:一路流向变速箱,一路流向变量泵、定量马达及控制原件组成的液压闭式回路。两路功率流分别通过左右行星排的齿圈和太阳轮进入行星排,由左右行星架输出,通过两路功率流的大小和方向的不同组成完成车辆的转向,从而提高转弯性能。特别是履带式拖拉机,双功率流转向装置可以降低履带转弯时的磨损和对地面的破坏作用,对于提高拖拉机的综合性能具有重要的意义。
1 履带式拖拉机双功率流转向装置及机构仿真介绍
履带式拖拉机在行走过程中特别是转弯过程和轮式拖拉机具有明显的不同,如图1所示。履带式拖拉机没有前后轮支撑,因此在转向时还需要辅助换向机构,不能直接通过导向轮引导转向。在进行转弯时,履带式拖拉机的两侧履带由于速度不同,慢边会在接触面上产生较大的横滑,由此产生较大的阻力,对履带和地面破坏都较为严重。

图1 履带式拖拉机转弯示意图
近年来,国外的一些大中型履带拖拉机已经开始使用双功率流差速转向机构,可以通过两条途径将发动机的功率传递给驱动轮,从而提高转弯性能。为了验证双功率流在履带拖拉机上使用的可行性,本次采用动态仿真的方法对其转弯性能进行测试,并与单功率流转向性能进行对比,主要流程如图2所示。
在进行动态仿真时,首先要对转向机构的结构进行分析,然后将结构进行简化以利于建模和动态仿真。建模主要采用Pro/E软件,建立好的模型导入到ADAMS软件进行动态仿真。由于换向机构存在杆件,需要对其进行柔性分析,还需要结合ANSYS软件进行模态分析,通过几种软件的综合应用得到合理的计算机结果,最后利用图像处理技术得到相关的曲线,以便于结果的查看。

图2 双功率流转向装置动态仿真流程
2 履带式拖拉机双功率流转向装置原理和性能分析
履带式拖拉机的双功率和单功率流转向装置相比,除了使用差速直驶机构外,还有一套单独的转向机构,该机构和差速直驶机构并列放在一起,在进行转弯或者直线行驶对方向进行修正时使用。为了进一步说明单功率流和双功率流转向装置的不同,分别列出了两种转向装置的机构布置图,其单功率流转向装置如图3所示。
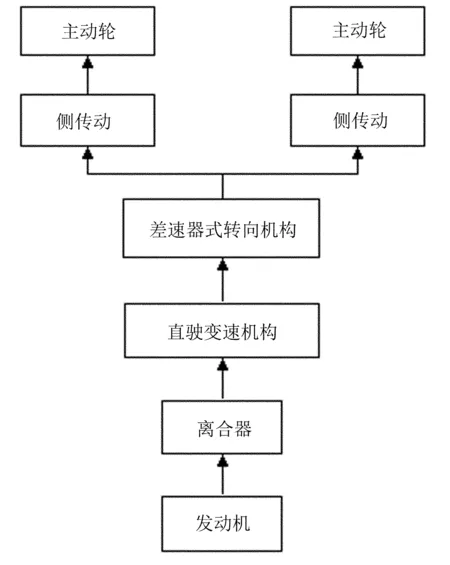
图3 单功率流转向装置机构布置图
单功率流转向器和普通转向机构的原理相同,在直线行驶时,转向机构不产生速度差;在转向时两侧会产生不同的速度,造成速度差,实现转向功能。多功率流转向机构布置图如图4所示。

图4 双功率流转向装置机构布置图
与单功率流有所不同,双功率流转向机构多了一个由发动机提供动力的转向机构,通过转向机构调节两侧的速度,实现履带式拖拉机的转向功能。转向机构性能的评价指标有多种,其中常用的两种是相对转向半径和平均旋转角速度,相对转向半径主要和行驶速度及传动比有关,相对转向半径可以用两侧履带的速度和转速来表示,即
(1)
其中,n2、n1为两侧履带驱动轮的转速,V2、V1为两侧履带的行驶速度。在进行转向时,可以通过设置将内侧驱动轮减少的速度和外侧驱动轮增加的速度相同,其关系式为
(2)
其中,nw2、nw1分别为内侧和外侧驱动轮的附加转速,iw为转向时发动机到驱动轮的传动比,ne为发动机的输出转速。于是可得
(3)

(4)

3 双功率流转向装置动态仿真
为了验证双功率流转向装置的优越性,可以采用图像处理和模拟软件进行动态仿真,来对比单功率流和双功率流履带拖拉机的转弯性能。在进行动态仿真时,不同的建模和模拟软件具有不同的优点:Pro/E在建模方面功能很强大,ADAMS软件在动态仿真方面功能较为全面,ANSYS在模态分析方面计算准确性好,可以综合利用这3种软件,对得到的结果进行图像处理,最终确定计算机结果。
如图5所示:在进行综合模拟仿真时,可以将Pro/E建立的模型文件分别导入到ADAMS和ANSYS软件中,导入到ADAMS软件的文件格式为x_t文件,导入到ANSYS软件中的格式为igs格式,其模型示意图如图6所示。
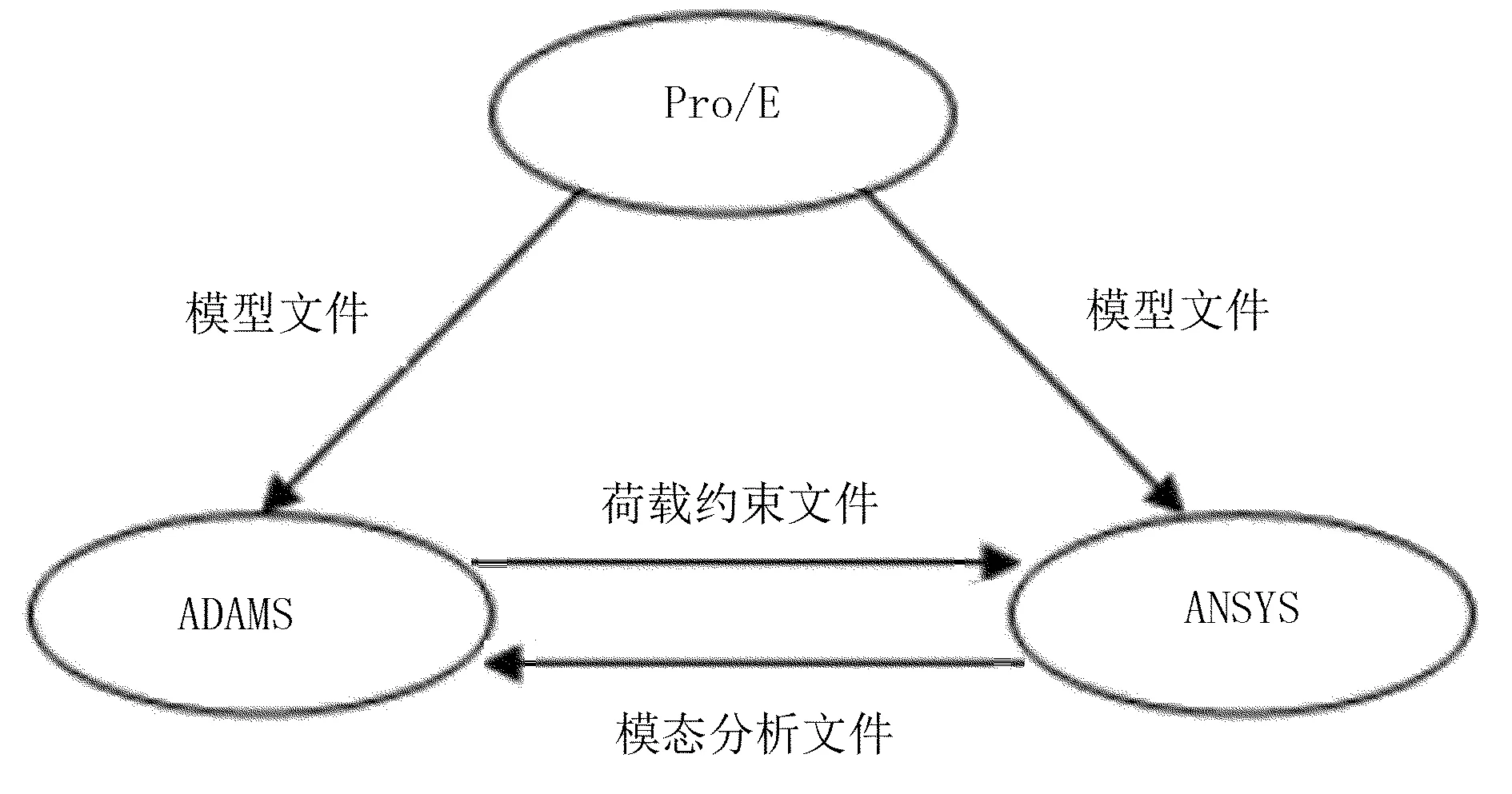
图5 软件综合模拟仿真
在动态仿真时,转向机构会产生变形量,需要将模型导入到ANSYS进行模态分析,因而需要施加载荷和约束,载荷和约束可以由ADAMS软件中导出。ANSYS模态分析完成后可以将模态分析文件再导入到ADAMS软件中进行动态模拟仿真,在ADAMS软件中作为柔性体进行仿真。通过仿真计算得到了如图7所示的结果曲线。

图6 转向机构仿真示意图

图7 单功率流和双功率流动态仿真结果
在车速和方向盘转矩信号一定的条件下,分别对单功率流和双功率流换向机构进行了动态仿真,并利用图像处理技术得到了仿真曲线。由仿真结果可以看出:双功率流换向机构输出的转矩较为稳定,可以避免在转弯时对拖拉机造成硬件损伤,提高转弯性能。通过仿真计算还得到了完成转弯所需时间,结果如表1所示。
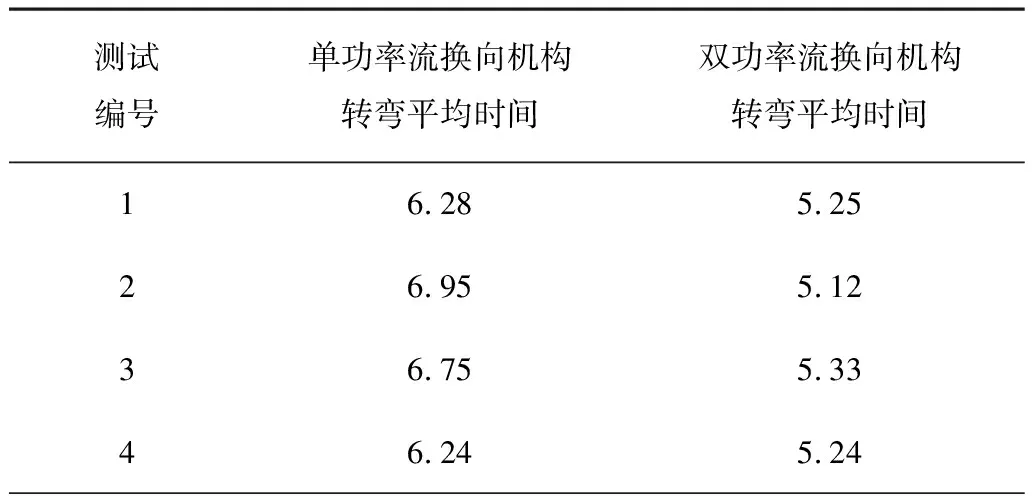
表1 转弯所用时间统计

续表1
对转弯所用时间进行了统计,结果表明:采用双功率流转弯完成的效率较高。为了进一步提高双功率流转弯机构转弯的优越性,对其转弯半径和转弯平均角速度进行了计算,得到了如表2所示的结果。

表2 转弯性能评价
分别对单功率流和双功率流转弯的转弯半径和转弯平均角速度进行计算,并得到了多次计算的统计结果。由表2结果对比可以看出:采用双功率流换向机构可以明显缩小转弯半径,提高转弯角速度,从而提高履带拖拉机的转弯灵活性,对于提高履带拖拉机的作业效率具有重要的作用。
4 结论
为了提高履带式拖拉机的转弯性能,将双功率流换向装置引入到了拖拉机转弯机构的设计上,并利用动态仿真的方法对机构的转弯性能进行了分析,最后利用图像处理得到了动态分析的仿真结果。仿真计算结果表明:采用单功率流和双功率流换向机构都可以实现拖拉机的转弯,但双功率流与单功率流相比,在转弯半径和转弯平均角速度方面都要优于单功率流,双功率流换向装置对于提高履带式拖拉机的转向性能具有重要的意义。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国石油石化(2021年8期)2021-03-30
中国新技术新产品(2020年4期)2020-05-05
石油化工建设(2019年6期)2020-01-16
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
科技创新导报(2016年27期)2017-03-14
电气化铁道(2016年4期)2016-04-16
