
多旋翼无人机飞行载荷对雾滴沉积规律的影响
2020-10-17 01:01王永龙樊嘉荣张梦龙
农机化研究 2020年5期
姜 昆,王永龙,樊嘉荣,张梦龙
(1.武汉科技大学 冶金装备及其控制教育部重点实验室,武汉 430081;2.河南新农人航空科技开发有限公司,河南 焦作 454950)
0 引言
农作物病虫害危及我国食品安全并制约农产品的全面供给。传统手动、小型植保机械作业存在药物残留超标、低效率及危害操作人员身体健康等负面问题,不能满足我国快速发展的专业防治需求[1-2]。多旋翼植保无人机具有喷洒高效性、立体性强、劳动强度低等特点,尤其适用于复杂地形作业,是植保喷施的高效手段[3]。
由于风场参与喷施作业,无人机喷施雾滴运动规律与传统喷施存在较大差异[4]。国内外学者[5-7]对旋翼植保无人机的喷施特性及防治效果进行了研究及探讨。邱白晶等[8]指出:无人机作业速度及高度对沉积雾滴浓度、均匀度影响极显著。秦维彩等[9]使用含示踪剂的水溶液进行喷雾试验,得出喷施高度、喷幅对植株冠层雾滴沉积分布存在影响的结论。陈盛德等[10-11]以HY-B-10L无人机为实验平台,研究不同飞行参数对植株冠层雾滴沉积分布的影响,同时指出旋翼竖直风场对雾滴沉积和穿透性影响最显著。杨风波等[12]运用计算流体力学仿真,研究雾滴在风场作用下的运动规律及漂移情况,并得出该方法能较准确地模拟实际喷施作业的结论。
以往的研究多集中于飞行、喷施参数对沉积结果的影响,实际作业中,植保无人机飞行载荷是重要变量且不断下降,不应被忽视。药液释放致飞行载荷减小,间接改变旋翼转数及机身仰俯角,导致旋翼风场变化并影响喷施结果。为此,以红旗n-10型植保无人机为例,结合数值分析与场地试验,研究飞行载荷下降对雾滴沉积规律的影响。
1 旋翼转速和仰俯角计算
多旋翼植保无人机巡航作业过程中,受空气阻力F、飞行重力G、旋翼总拉力T的作用,如图1所示。

图1 多旋翼植保无人机平飞受力图
定义:无人机中心点为坐标原点,行进负方向为X正向,机身左侧至右侧为Y正向,垂直地面向上为Z正向。
由图1得无人机平飞受力平衡方程为
F=G·tanθ
(1)
(2)
其中
(3)
(4)
CD=CD1(1-sin3θ)+CD2(1-cos3θ)
(5)
式中F—无人机飞行阻力(N);
G—无人机飞行载荷(N);
T—旋翼总拉力(N);
θ—机身仰俯角(°);
ρ—飞行环境空气密度(kg/m3);
V—平飞速度(m/s);
S—无人机最大横截面积(m2);
N—旋翼转数(r/min);
DP—旋翼直径(m);
CT—旋翼拉力系数;
CD—无人机阻力系数;
CD1—仰俯角为0°时,无人机阻力系数;
CD2—仰俯角为90°时,无人机阻力系数。
根据上式得飞行载荷G和仰俯角θ,飞行载荷G与旋翼转数N的函数关系为
(6)
(7)
前后旋翼转数差产生仰俯角,因转数差不大,本文所求旋翼转数为平均旋翼转数。参考多旋翼飞行器设计与控制[13]提供的实验数据,结合红旗n-10所采用2880型旋翼具体参数,求解旋翼拉力系数CT。带入数据得出:n-10无人机在作业速度V为0、1、2、3m/s时,旋翼转数N与飞行负载G的函数关系如图2所示;仰俯角θ与飞行负载G的函数关系如图3所示。其中,空气密度ρ取1.29kg/m3。
大面积作业时,植保无人机按既定航线采取定高、定速巡航作业方式覆盖喷施区域。伴随药液释放,飞行载荷减小达12kg。为控制作业速度且保持力平衡,无人机旋翼转数下降可达32%;同时,飞行阻力有所增加致仰俯角增大明显。旋翼流场是植保无人机喷施重要影响因素。根据上述函数关系求解旋翼转速、仰俯角数据用于数值模拟参数设置。

图2 飞行载荷G与旋翼转数N函数图

图3 飞行载荷G与仰俯角θ函数图
2 模型建立与设置
2.1 研究对象
以红旗n-10型四旋翼小型植保无人机为研究对象(见图4),主要作业参数如表1所示。其配备4个雾化喷头,置于相应旋翼电机下方,与旋翼垂直距离0.2m处。

图4 n-10型四旋翼小型植保无人机
2.2 几何模型建立
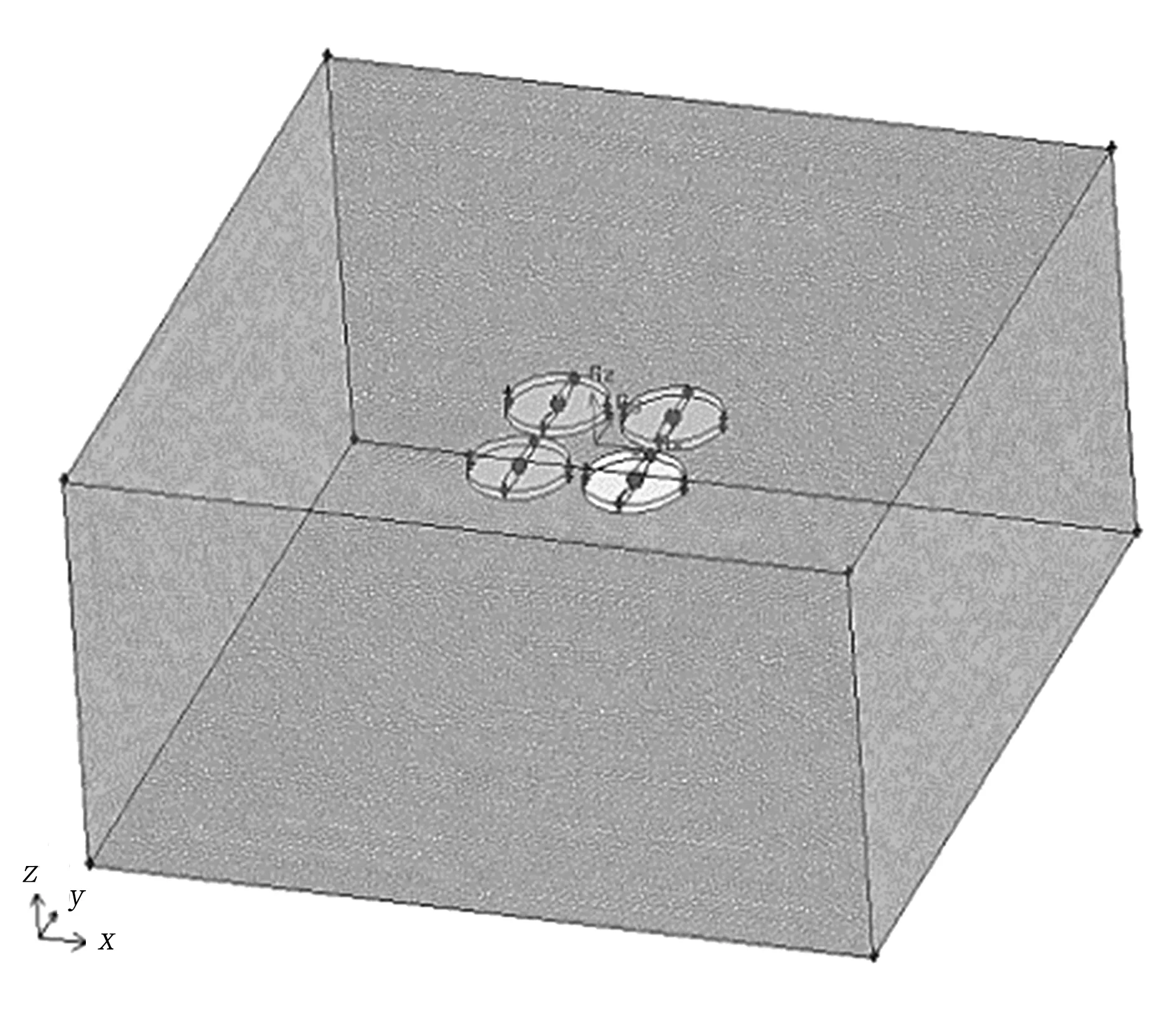
2880型旋翼为多曲面复杂零件,使用3D扫描仪对无人机正、反旋翼进行扫描,Geomagic Design X软件对扫描面逆向建模。模型导入前处理软件Gambit中,结合n-10植保无人机实际喷施范围及机身尺寸,在Gambit中建立,长方体(6m×6m×3m)模拟计算区域,并进行网格划分,如图5所示。机身结构造型复杂且不是本文研究重点,为减小计算成本暂不做考虑。

图5 模拟计算区域
本文模拟计算域由4个包含旋翼部分的动域和1个静域组成,动域与静域交界面设置Interface连接,对区域交界处网格加密处理。经网格无关性验证,网格划分完毕后的单个旋翼网格数约为22.5万,网格总数约为205.8万,其处理结果如图6所示。

(a) 正反旋翼网格化示意图
(b) 计算域网格化示意图
2.3 模拟参数设置
该无人机由4个无刷直流电机提供动力,相邻电机转向相反以减小不必要的滚转力矩,因此相邻旋翼为反向旋转设置。选用DPM(Discrete Phase Model)模型对离散相进行喷施模拟,不考虑雾滴间的互相碰撞及雾滴体积变化对连续相的作用。
1)离散相喷施参数:材料水密度997.0kg/m3,释放雾滴数为500;雾滴喷射角度垂直四旋翼所在平面向下,喷施半锥角为30°;采用离散随机游走模型。
2)边界条件设置如图5所示。计算区域右侧面为速度入口边界条件,速度设置为0(无人机悬停)、1、2、3m/s。有效喷幅区面域设置为粒子捕捉,其余进出口离散边界条件设置为粒子逃逸。
3)离散相采用非稳态模拟,添加重力加速度g=9.81m/s2,模拟时长10s,迭代时间步长0.05s,时间步数为200。
3 旋翼风场与有效沉积率的结果与分析
无人机满载到空载的喷施过程中,雾滴沉积规律变化,本质由旋翼风场变化引起。本文先对不同飞行载荷下的旋翼风场进行探讨,再模拟计算飞行载荷为22、20、18、16、14、12、10kg,作业速度为0(悬停)、1、2、3m/s,统计作业高度2m时,无人机右后(行进方向右后)、右前(行进方向右前)喷头喷施雾滴有效沉积率。
3.1 旋翼风场变化
图7为无外界环境风场,平飞速度为3m/s,高度为2m,飞行载荷为22、18、14、10kg时,在观测面y=0.442m(右侧旋翼所在竖直平面),旋翼风场速度云图(显示范围为-25~10m/s,负号表示Z轴负方向)。

(a) 22kg

(c) 14kg

(d) 10kg
由图7可知:旋翼风场从前、后旋翼位置产生并向下流动,在此过程中逐渐减弱,接近地面时向周边扩散。由于来向风场参与,前后旋翼风场在机腹下约1m处有汇合现象。无人机飞行载荷从满载22kg降至自重10kg过程中,旋翼转数下降33%,在计算域y=0.442m平面,无人机正下方1m处风速由图7(a)约16m/s降至图7(d)约11m/s,同时机身仰俯角增加约6°,使旋翼气流漂移更明显。
旋翼风场流速随飞行载荷下降而减弱显著,穿透力减弱;受对向来流影响更小,行径后方旋翼风场对雾滴作用范围大于前旋翼风场;机身仰俯角的增加,使旋翼气流向后漂移加重;飞行速度越大,旋翼风场向后漂移越严重。n-10型无人机的4个喷头安装于各旋翼下方0.2m处,该位置旋翼风场稳定、扰流小,能增强药液穿透性,降低漂移。
3.2 雾滴沉积统计及分析
3.2.1 雾滴沉积率评价
n-10型无人机结构与功能对称设计,为便于雾滴数量统计,减少运算时长,采用无人机右后、右前喷头单独喷施模拟的方式替代整体喷施,且不考虑雾滴破裂、蒸发等因素。使用Fluent 15.0软件,计算作业速度为0、1、2、3m/s,飞行高度2m,飞行载荷为22、20、18、16、14、12、10kg时,对应旋翼转数和仰俯角条件下无人机的喷施情况,获取相应工况下的雾滴有效沉积率(喷施雾滴在有效喷幅区内的数量占喷施雾滴总数比),以评判各飞行载荷下的雾滴漂移情况。
雾滴有效沉积率计算见式(8)~式(10)。有效喷幅区域S是以喷嘴竖直所在直线为中心,r为半径的圆形区域,S平面与喷嘴竖直距离为h。
S=π·r2
(8)
r=h·tanβ
(9)
(10)
式中β—喷头半锥角(°);
θ—机身仰俯角(°);
h—喷嘴与地面垂直高度(m);
r—有效喷幅区半径(m);
S—有效喷幅区面积(m2);
NS(n,θ)—旋翼转数为n、机身仰俯角为θ时雾滴在有效喷幅区S的个数;
N(n,θ)—旋翼转数为n、机身仰俯角为θ时喷头喷出雾滴总数;
D(n,θ)—旋翼转数为n、机身仰俯角为θ时雾滴有效沉积率(%)。
3.2.2 雾滴沉积分析
无人机右后喷头雾滴有效沉积率模拟结果,如表2所示。
由表2可见:作业速度及飞行载荷不同,雾滴有效沉积率不同。满载且悬停时,右后喷头雾滴有效沉积率可达85.1%;作业速度3m/s、飞行载荷10kg时,雾滴有效沉积率低至31.2%。无人机飞行载荷从22kg降至10kg过程中,平飞速度为0、1、2、3m/s时,作业初段与末段相较,右后喷头喷施雾滴有效沉积率分别相差6%、9.1%、10.7%、11.7%。平飞速度相同,大飞行载荷作业下的右后喷头雾滴有效沉积率优于小飞行载荷作业时。安全作业速度内,这种差距随作业速度提高更为显著。
大飞行载荷作业时,无人机强旋翼风场使更多喷施雾滴被携带并快速向有效喷幅区运动,一定程度上削弱了正面来流对雾滴的影响,雾滴群总体抗漂移性更好。同一平飞速度,无人机小飞行载荷作业拥有更大机身仰俯角,且速度越高、仰俯角越大。仰俯角的增加使旋翼所在平面及喷嘴相对无人机行径方向逆向转动,旋翼风场随之转动,虽仰俯角增加不大,但也增加了雾滴群被旋翼风场所携带而逃逸出有效喷幅区的几率。总体而言,同等作业速度,右后喷头在大飞行载荷作业时的雾滴有效沉积率优于小飞行载荷。
如图8所示:平飞速度为0、1、2、3m/s,植保无人机飞行载荷与右后喷头喷施雾滴有效沉积率呈线性关系,决定系数R2分别为0.810 6、0.939 9、0.944 3、0.915 5,线性方程回归效果显著。在以上作业速度中,植保无人机飞行载荷下降对右后喷头雾滴有效沉积率影响显著。

图8 右后喷头在各飞行载荷的雾滴有效沉积率
无人机右前喷头雾滴有效沉积率模拟结果,如表3所示。
由表3可见:满载且悬停时,右前喷头雾滴有效沉积率为83.9%;作业速度为3m/s、飞行载荷10kg时,雾滴有效沉积率低至27.3%。无人机飞行载荷从22kg降至10kg的过程中,平飞速度为0、1、2、3m/s时,作业初段与末段相较,右前喷头喷施雾滴有效沉积率分别相差3.2%、6.5%、16.1%、10.5%。平飞速度相同,大飞行载荷作业下的右前喷头雾滴有效沉积率优于小飞行载荷作业时,安全作业速度内,这种差距随作业速度提高更为显著。

表3 右前喷头各条件下雾滴有效沉积率Table 3 Effective deposition rate of droplets under the conditions of the right front nozzle %
低速作业时,前喷头有效沉积率与后喷头大致相同。作业速度超过2m/s时,受更强对向来流作用,前旋翼流场向后移,并与后旋翼流场汇合,后旋翼流场移动幅度更小。在流场共同作用下,前喷头喷施雾滴逃逸出有效喷幅区的比例相较于后喷头更大,因此前喷头的雾滴有效沉积率低于后喷头。
如图9所示:平飞速度为0、1、2、3m/s,植保无人机飞行载荷与右前喷头喷施雾滴有效沉积率呈线性关系,决定系数R2分别为0.804 0、0.726 7、0.848 5、0.937 6,线性方程回归效果显著。在以上作业速度中,植保无人机飞行载荷下降对右前喷头雾滴有效沉积率影响显著。
综上所述,植保无人机从满载到空载的巡航过程中,前后喷头喷施雾滴有效沉积率都随飞行载荷减小而降低。作业速度为3m/s时,无人机满载与空载的雾滴有效沉积率相差约11%,差距随作业速度提高更为明显。
4 试验
4.1 无人机喷施试验
为验证飞行载荷对雾滴沉积的影响,对n-10型无人机与取样水敏纸垂直高度2m,平飞速度1、2、3m/s,飞行载荷22、20、18、16、14、12、10kg的作业条件进行药液沉积试验,地点选择河南省武陡县郭提村试验田,如图10(a)所示。水敏纸(3cm×8cm)平放并固定于支撑杆顶端,每一试验架次掠过3张水敏纸,前后水敏纸相距5m,如图10(b)所示。每架次喷施完成后统计3张水敏纸雾滴个数并记录其平均数。试验时,环境温度为26°C,相对湿度53%,风速1.0~2.0m/s。
采用Imagej图形处理软件统计水敏纸上的雾滴数,处理过程如图10(c)、(d)所示。

图9 右前喷头在各飞行载荷的雾滴有效沉积率

(a) 喷洒实验图

(b) 布置示意图

(c) Imagej雾滴处理

(d) Imagej雾滴处理结果
4.2 试验结果
雾滴处理结果如图11所示。

图11 雾滴数量统计结果
由图11可知:无人机平飞速度为1、2、3m/s时,相较满载与空载,取样水敏纸上的雾滴数分别相差53、92、102,满载喷洒时的水敏纸上的雾滴数多于空载喷洒时。试验雾滴沉积变化趋势与仿真计算雾滴有效沉积率大致吻合,说明作业过程中,飞行载荷对喷施雾滴有效沉积有直接影响。大飞行载荷时,无人机下方水敏纸上的雾滴数多,小飞行载荷作业时喷施雾滴向四周扩散较多,导致旋翼下方水敏纸上雾滴数更少。
5 结论
1)巡航作业中,飞行载荷随药液释放而减小,植保无人机旋翼转数下降可达32%,仰俯角增加可达10°,旋翼风场随飞行载荷下降而减弱并逐渐向后漂移。
2)竖直旋翼风场会抑制雾滴漂移或扩散,仰俯角增大会加重雾滴漂移。作业速度0~3m/s间,无人机满载比空载时的雾滴沉积率高4%~11%左右,模拟与实测基本一致。植保无人机飞行载荷下降会降低雾滴有效沉积,漂移增加。
猜你喜欢
探测与控制学报(2023年4期)2023-09-12
成都信息工程大学学报(2021年5期)2021-12-30
北京航空航天大学学报(2021年9期)2021-11-02
小学生学习指导(高年级)(2021年3期)2021-04-06
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
能源(2017年8期)2017-10-18
探测与控制学报(2017年1期)2017-03-23
北京航空航天大学学报(2016年8期)2016-11-16
通信电源技术(2016年1期)2016-04-16
