
移动式机载提灌装置设计与试验
2020-10-17 01:16阮红丽李光辉周小波曾文明
农机化研究 2020年11期
阮红丽,李光辉,周小波,2,江 昊,曾文明,卢 珍
(1.四川省农业机械研究设计院,成都 610066;2.南方丘区节水农业研究四川省重点实验室,成都 610066)
0 引言
提灌站是保证丘陵地区农业灌溉用水的重要基础设施,旱情发生时保生产、解人畜饮水困难的作用巨大[1]。由于丘区基础设施配套不完善,无法架设低压线路或架设低压线路较为困难。
拖拉机是现代农业机械化生产中重要的动力机械[2],目前配备不同的作业机械主要用于整地、播种、收获、运输及农田基本建设等作业。由于我国农业生产有很强的季节性,许多作物的整地、播种及收获期都很短,导致拖拉机使用时间短;此外,与拖拉机配套的农机作业机具少,机具的配套比低,农机的效率得不到充分发挥。
为提高灌区抗旱减灾能力、促进自身灌排能力提升、确保农业生产经济效益,亟需一种便于移动、方便灵活的抗旱减灾装置。
目前,抗旱减灾装置主要采用车载移动泵机组等方式。张军等[3]研究的车载电力驱动型泵车(自吸泵)是在汽车底盘上集成柴油机发电机组、自吸泵和真空辅助抽吸系统,由发电机组为水泵供电。刘爱明等[4]研究的车载移动泵机组动力机为柴油机或电动机,电源采用随车柴油发电机组的自发电或网电。蒋文军[5]研究的自吸泵移动泵站是在汽车上集成柴油发电机组、自吸式污水泵,由发电机组为自吸泵供电。赵文军等[6]研究的集成自吸式移动泵站主要由柴油机、离心泵等构成。
综上,车载移动泵机组一般采用柴油机或电动机提供动力,但利用拖拉机驱动力为水泵提供动力的移动式机载提灌装置研究较少。
1 工作原理及结构组成
1.1 工作原理
移动式机载提灌装置在进行车架等结构设计基础上,将拖拉机动力输出通过齿轮传动的方式转化为自吸泵的动力,将水加压抽至灌区。
1.2 结构组成
移动式机载提灌装置由提灌系统和监控系统组成,组成框图如图1所示,结构示意如图2所示。
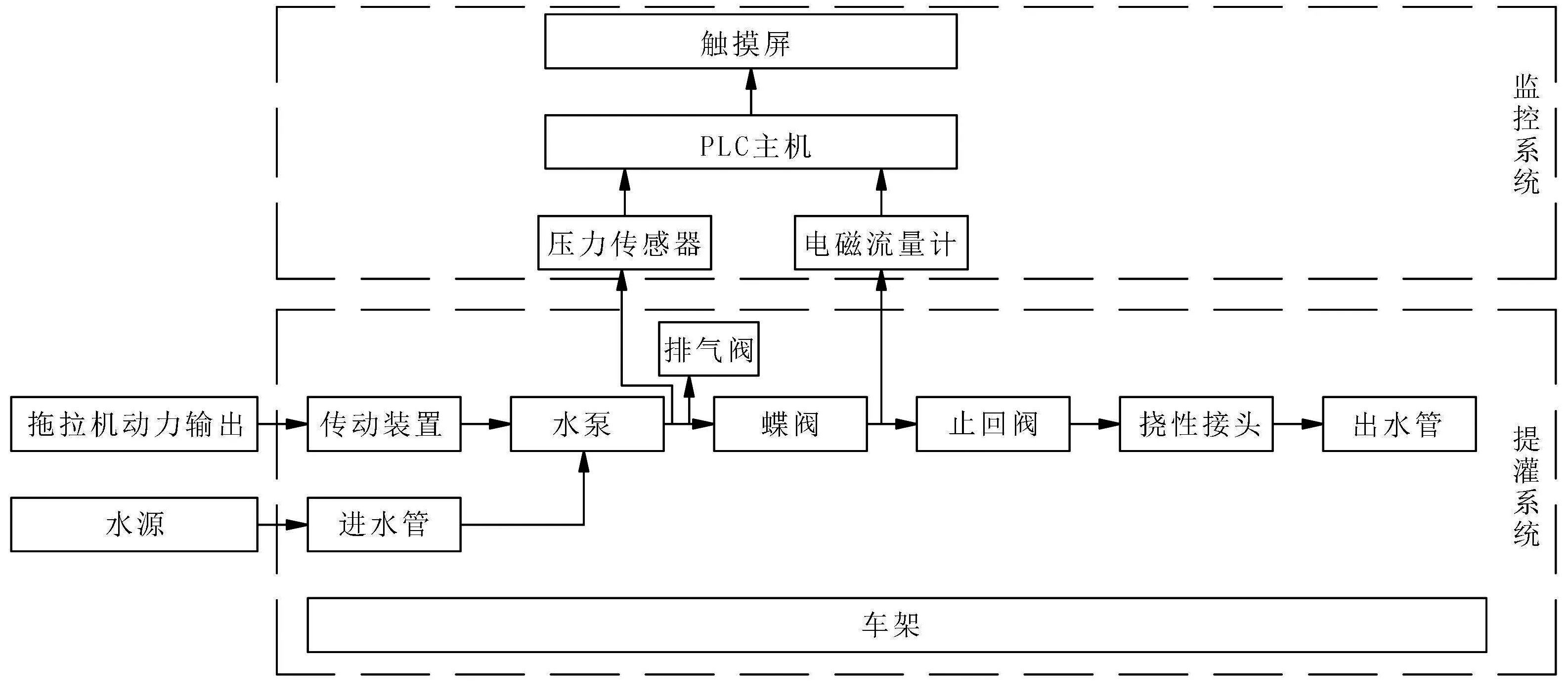
图1 装置组成框图Fig.1 Device block diagram

(a) 主视图
1.2.1 提灌系统
提灌系统主要由水泵、传动装置、阀门、管路和车架等组成。
1.2.1.1 水泵
因移动式机载提灌装置尺寸有限,在性能相近的情况下,选配结构轻巧、体积小、质量轻、价格比合理的水泵[7]。确保水泵正常启动和正常运行的关键是确定水泵的引水方式[8]。水泵各种引水方案对比如表1所示[9]。
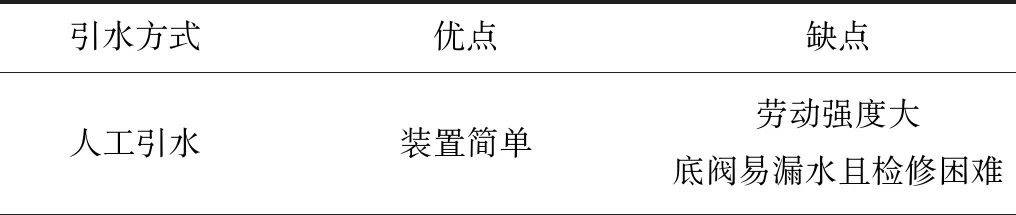
表1 水泵引水方案对比表Table 1 Contrast of pump drainage tables
通过方案比较可知:人工引水劳动强度较大,真空泵和真空引水装置占地面积较大,考虑到本装置水泵引水的特殊性,设计时采用自吸泵。自吸泵启动时不需灌泵,依靠泵本身的内部结构,无需任何外部辅助,经过短时间的运行,就可以把液体抽上来正常输送。该泵具有结构紧凑、操作方便、运行平稳、效率高及寿命长等优点。
1.2.1.2 传动装置
根据本装置水泵的转速要求,通过对国内传动方式的分析比较,优选出适用的专用传动装置。
1)万向联轴器。两端分别与拖拉机动力输出轴和行星齿轮增速器的输入轴连接。
2)行星齿轮增速器。主要由太阳齿轮、行星齿轮、齿圈和行星架组成,采用行星齿轮传动。行星齿轮传动的主要特点是体积小、承载能力大、传动效率高及工作平稳;作用是在输入轴和输出轴之间将输入轴旋转而产生的动力传递给输出轴,同时将输入轴的较低转速转变为满足输出端所需的转速。
3)联轴器。行星齿轮增速器的输出轴通过联轴器与水泵的泵轴相连。
1.2.1.3 配套设备
1)阀门。包括:①蝶阀,主要用于截断或接通管道中的水,具有结构简单、长度短、质量轻、体积小,易于实现快速启闭的特点;②止回阀,主要用于阻止水倒流、防止泵反转;③挠性接头,是管道间的软性连接件,具有吸收管件变形、减震降噪、保护系统的作用;④排气阀,主要用于排除管路中多余的气体。
2)管路。进水管采用波纹软管,出水管采用消防水带,便于快速安装。
3)车架。该装置将传动装置、水泵、阀门和监控系统全部集成到车架上。车架与拖拉机联结采用三点悬挂的方式,采用型钢焊接,强度较高。其与水泵、传动装置等采用螺栓连接,且均安装平垫圈和弹簧垫圈以防止松动,牢固连接水泵、传动装置等设备。
1.2.2 监控系统
1.2.2.1 硬件系统
移动式机载提灌装置监控系统以触摸屏为上位机、PLC[10-12]为控制核心、传感器为输入信号端,通过编制可视化界面及程序,对输入信号进行处理。系统结构示意图如图3所示。

图3 监控系统结构示意图Fig.3 Schematic diagram of monitoring system structure
根据监控功能,搭建装置硬件系统,主要包括:①触摸屏,作为整个系统的核心部件之一,进行数据交换和人机交流;②PLC主机,通过通信电缆与触摸屏通信;③PLC模拟量输入模块,接收流量信号、压力信号输入,并对其进行处理;④电磁流量计,工作电源为DC24V,流量检测信号为4~20mA,输入通道为PLC模入量模块的AI2;⑤压力传感器,工作电源为DC24V,压力检测信号为4~20mA,输入通道为PLC模入量模块的AI0。其硬件架构如表2所示。
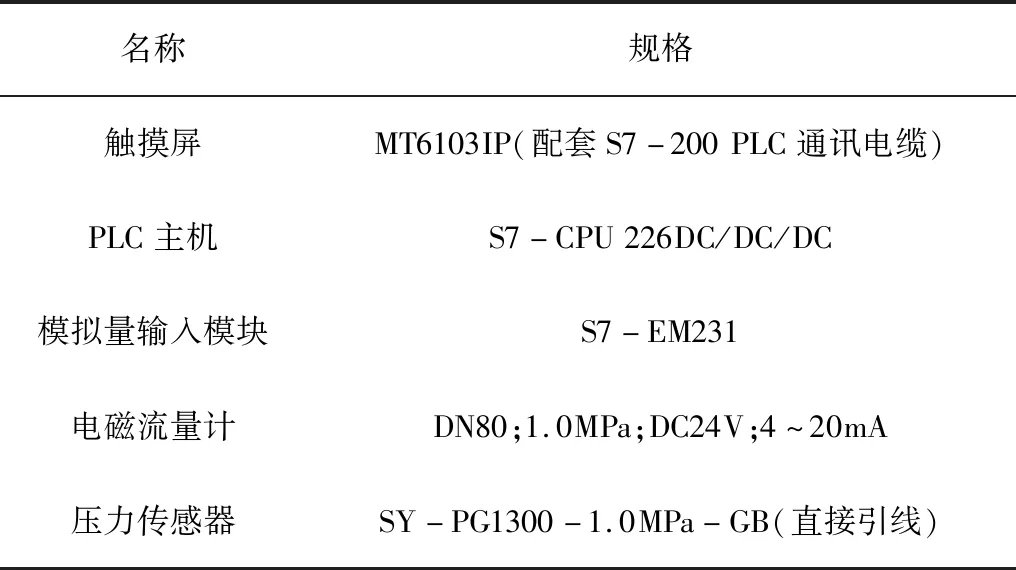
表2 硬件架构表Table 2 Structure of hardware
1.2.2.2 软件系统
1)可视化软件系统。根据监控系统功能需求分析,可视化编程环境下的操作主要包括新增PLC设备、编制可视化界面、元件变量连接,软件变量如表3所示。
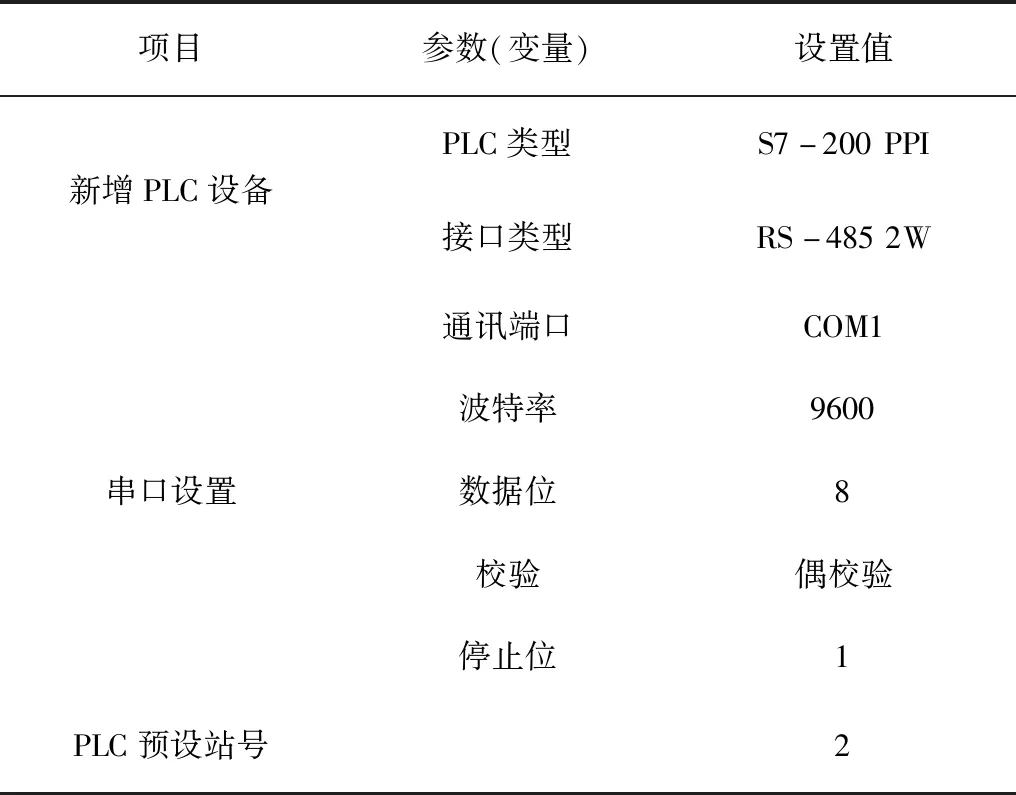
表3 软件变量表Table 3 Variables of software
2)PLC程序。根据监控系统功能需求分析,PLC编程软件环境的操作主要包括参数设置、编制子程序、编制主程序及对于压力值调用程序。子程序局部变量定义如表4所示。表4中,Input设为AIW0,Ish设为32000.0,Isl设为6400.0,Osh设为1.0,Osl设为0.0,Output设为VD10;对于流量值调用程序,Input设为AIW2,Ish设为32 000.0,Isl设为6400.0,Osh设为100.0,Osl设为0.0,Output设为VD20。梯形图如图4所示。

表4 子程序局部变量定义表Table 4 Local variable definition of the subprogram

图4 主程序梯形图Fig.4 Main program ladder diagram
1.2.2.3 系统联调
将PLC程序及可视化界面分别编译、下载,建立触摸屏与PLC的通信,在上述基础上,对装置进行监控。
2 仿真试验
利用三维模型软件建模,进行网格划分,输入水泵流量、扬程、转速、管径及压力等级等参数进行计算分析,求出最优参数组合。装置三维轴测图如图5所示,参数表如表5所示。
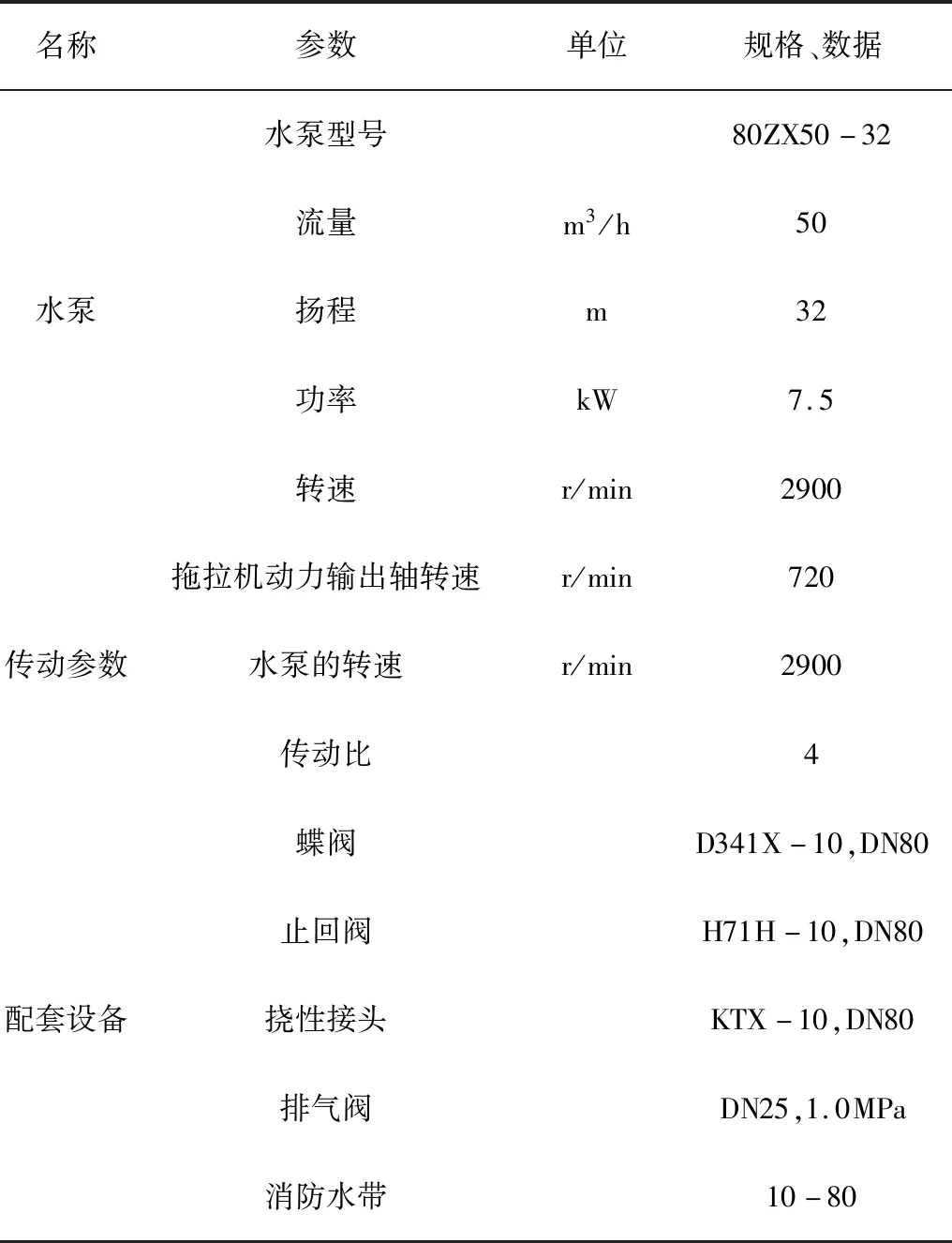
表5 参数表Table 5 Parameter
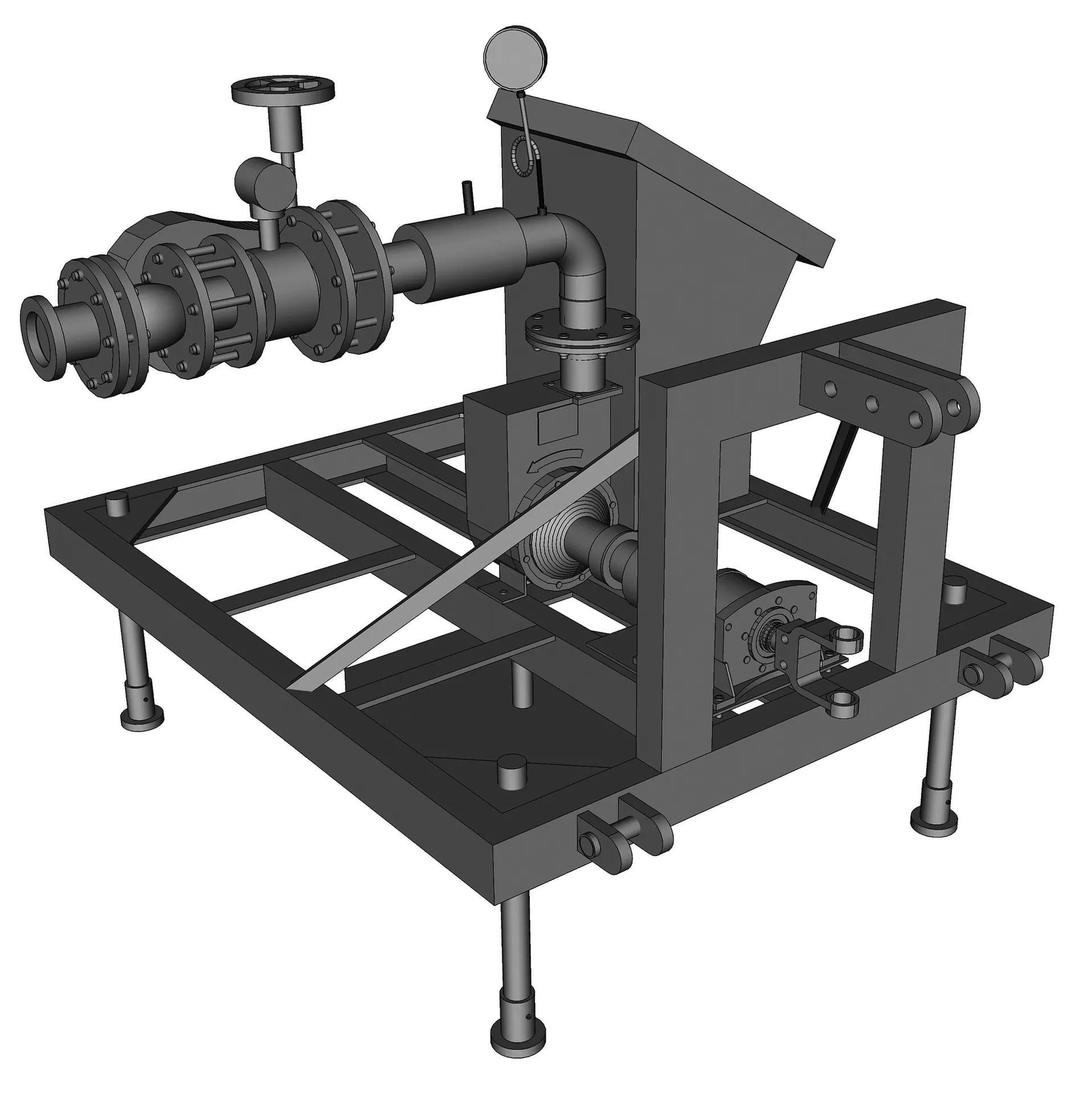
图5 装置三维轴测图Fig.5 3-D axonometric mapping of the device
3 装置试验及示范应用
1)试验地点。四川省农业科学院简阳实验基地。
2)试验设备。现场利用移动巡检设备(压力、流量、转速等传感器、信号接受分析处理器等)进行性能测试。
3)试验步骤。该装置安装完成后,试验步骤如下:①首先拖拉机牵引移动式机载提灌装置到达指定地点后,铺设进、出水管道,在水泵、出口管道等部位布设信号传感器;②将拖拉机动力档切换到动力输出轴上,水泵启动,开启蝶阀;③14个工况点运行,进行数据采集、分析、处理[13]。
4)判定方法。按照GB T 3216-2016的相关要求对装置进行测试,规定性能点QG、HG为中心,如果流量或者扬程、或者两者同时均在使用的容差范围内,则满足性能要求。
5)试验数据。运行测试数据如表6所示,水泵性能特性曲线如图6所示。

表6 装置运行测试数据Table 6 Test data of the device
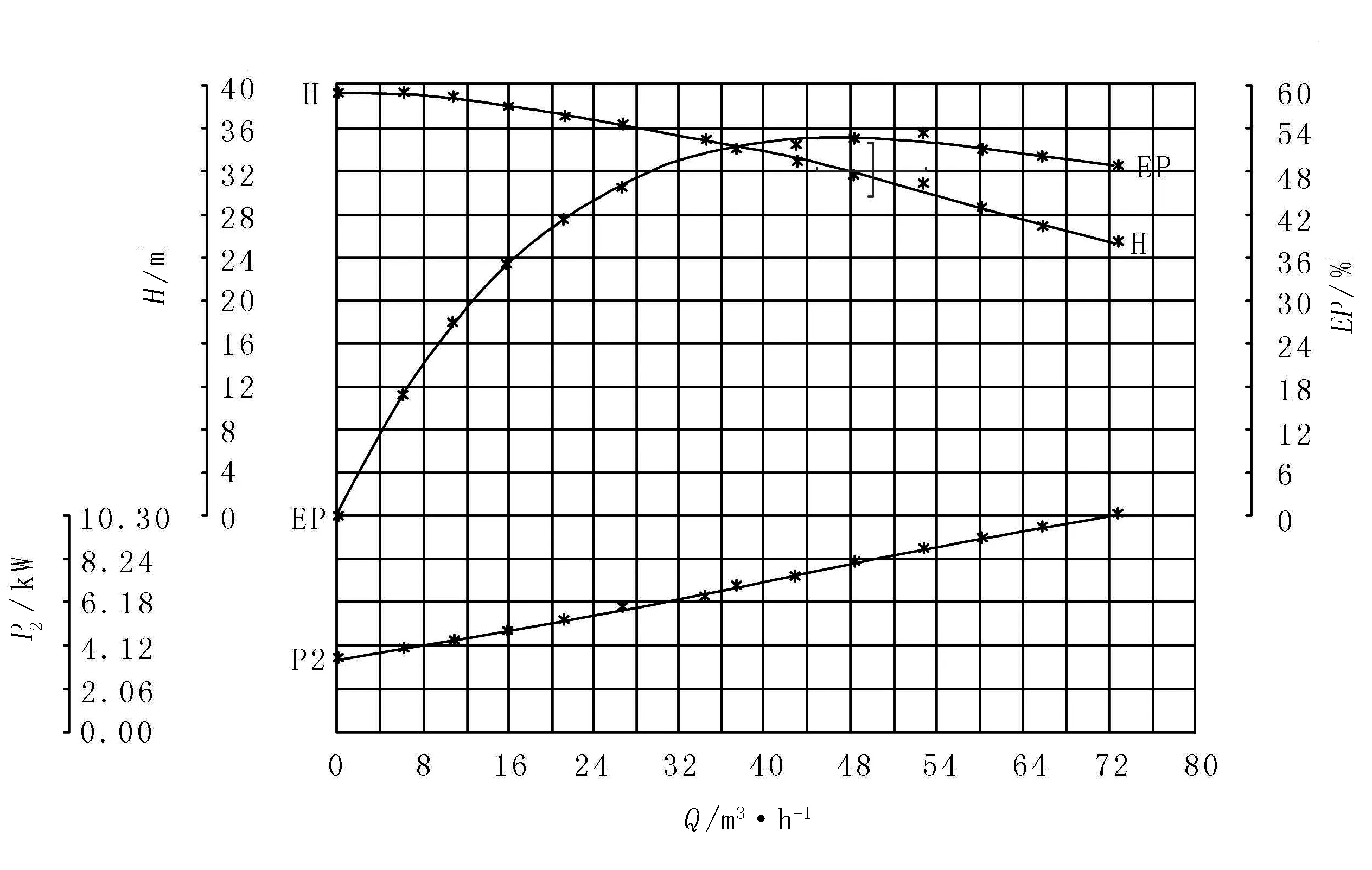
图6 水泵性能特性曲线Fig.6 Performance characteristic curve of pump
4 结论
由该水泵的性能特性曲线可以看出:规定性能点QG=50m3/h,HG=32m,流量容差为±10%,扬程容差为±8%;采用十字线判定法,交点水泵流量为49.37 m3/h、扬程为32m,流量、扬程均在使用的容差范围内,水泵性能参数满足要求,达到设计要求。
猜你喜欢
水泵技术(2022年2期)2022-06-16
水泵技术(2022年1期)2022-04-26
水泵技术(2022年1期)2022-04-26
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
小学生导刊(2017年15期)2017-05-17
小布老虎(2016年12期)2016-12-01
肿瘤预防与治疗(2015年1期)2015-09-26
山东农机化(2015年6期)2015-01-03
中国科技纵横(2014年13期)2014-12-16
水电站机电技术(2014年1期)2014-09-26
