
基于PLC的水稻机械播种量控制系统设计与试验
2020-10-17 01:16龚敏昆
农机化研究 2020年11期
龚敏昆
(广西工业职业技术学院,南宁 530001)
0 引言
水稻是我国最主要的粮食作物,一半的人口以之为主食。水稻轻简化栽培的最显著特征是以直播代替了播种和移栽,使得水稻生产前期的农艺操作大幅简化。水稻直播的操作相对简单,适合利用农业机械来完成。水稻机械直播不仅具有更高的生产效率,还能节约人工成本,增加成穗率,从而获得更高的产量。为了满足实际的需求,人们研制出了多种型号的水稻直播机。杨坚等设计的2BD-8自走型分流式小型水稻直播机采用电磁振动量的大小来调节播种量,获得了良好的作业性能和较高的功效[1]。梁宝忠等研制了一种适应多种环境的水稻直播机,一次能完成多个作业工序[2]。
目前,水稻直播机械的种类齐全,很好地满足了不同条件下的作业要求,但普遍存在不能检测漏播和准确调节播种量的问题[3]。例如,推行直播的早期阶段,水稻的产量一直不稳定,原因在于无论是人工撒播还是机械直播,其对播种量的控制不够精准;不同水稻品种的最适播种量存在差异,当实际播种量不合适时,水稻的生物量和产量都会受到影响,因此对播种精度提出了更高的要求[4]。
播种精度是水稻直播机最主要的性能指标,对最终产量有着直接的影响,该性能的高低大多是由排种器和播种量控制系统决定的。排种器精量播种的关键部件,具有多种类型,且外槽轮式和窝眼轮式应用较多,但也有局限性[5]。播种质量监测不仅能够直接影响水稻直播机的作业精度,还反映了机械的智能化水平[6]。郑一平等利用光电传感器和单片机分别对水稻直播机排种器的排种数和播种器的播种量进行实时检测和显示,为精量播种奠定了基础[7-8]。丁时峰等以单片机为核心,设计了一套水稻直播机的漏播检测装置,在实际应用中表现出良好的检测效果和可靠性[9]。检测到播种状态后,直播机的控制系统可以根据设定值分析调节量,然后产生信号驱动步进电机改变排种器对种子的容纳能力,从而实现精量播种[10-11]。
PLC为可编程控制器,最初是为在工业环境下应用而设计的,其编程和维修方便,可靠性和抗干扰能力都较高,还具有完善的控制功能和良好的性价比。因此,相比其它电子设备PLC更加适合于环境恶劣的田间作业,在农业机械的控制中应用较多[12]。收获是所有农作物生产必不可少的环节,收获机械成为农机开发和PLC控制研究的重点领域[13-14]。此外,PLC对农业机械的控制功能还包括变量施肥、穴盘苗移栽和运行状态检测等[15-17]。
本文以PLC为核心设计了一个水稻机械播种量的控制系统,并在田间进行水稻直播试验评价系统对播种量的控制效果,旨在为实现水稻的机械化精量直播提供技术支持。
1 系统组成
播种量控制系统由播种机械和装载的PLC 设备组成,如图1所示。水稻直播机械为中机南方的2BD-10型水稻精量旱直播机,由东方红SG450型轮式拖拉机牵引,配套动力20kW;一次能播种10条,作业幅宽3.0m,行距分为20、25、30cm3档,株距在1.2~2.0cm之间可调。排种器的主要部件为排种轮,通过步进电机调节排种轮上孔眼的尺寸以达到控制播种量的目的。直播机的排种动力通过链条传输给排种器轴,驱动排种器工作。该型机械能够同时完成开沟、起垄、播种和覆土作业,播种效率可以达到0.3hm2/h,伤秧率小于1%,具有良好的适应性。

图1 播种量控制系统的总体设计Fig.1 General design of control system of sowing rate
控制器采用西门子S7型PLC,由拖拉机的蓄电池提供电源,包括中央处理单元(CPU)、存储器、编程器、输入/输出单元和扩展槽。PLC的核心部件为CPU224,数据输入点和数据输出点分别有14个和10个,能够满足对播种量控制的需求。PLC具有7个扩展槽,可以将输入/输出点扩展至168路数字量和35路模拟量。人机接口是TD200操作界面,用于进行参数设定和运行数据监控。外部设备采集的信息通过TLC1543CN型A/D转换器转换为数字信号后发送到CPU,生成的控制指令由MAX538型D/A转换器转换为模拟信号后发送给控制执行设备。
2 控制原理
在拖拉机的地轮上安装一个HAL41F型霍尔传感器,采集地轮转动产生的脉冲信号,发送给PLC计算获得播种机的行进速率。在导种管的末端安装一个基恩士PS-56R型光电传感器,利用对射的红外线捕捉单粒水稻种子落下时产生的电信号。光电传感器在正常状况下维持低平电信号,有种子经过时产生高平电信号。因此,设定低平电信号持续达到2s时为种箱排空,高平电信号持续达到2s时为导种管堵塞;按照编制的程序运行,根据机械行进速率和高平电信号的频率计算瞬时播种量,并与设定值进行比较。PLC完成实际播种量和设定值的比较后,依据两者之间的差异生成控制指令驱动森创110BYG250C型步进电机正反转动,通过螺杆调节排种轮上孔眼的尺寸,从而控制播种量。当出现种箱排空或导种管堵塞的状况时,PLC向一个LTE-1201型声光报警器发送信号,启动报警以提醒操作人员排除故障,控制系统工作原理如图2所示。

图2 播种量控制系统的工作原理Fig.2 Working principle of control system of sowing rate
3 程序设计
控制系统的程序用S7-200编程专用软件Micro/WIN32设计,除了主程序外,还可以调用输入控制子程序、播种量控制子程序及TD200数据控制子程序等。系统开机后首先进行初始化,然后调用经过模块初始化的子程序,查询输入控制子程序和TD200数据控制子程序启动的充分条件是否满足。在满足上述两个子程序启动充分条件的前提下,系统再检查播种量控制子程序启动的必要条件是否满足,在得到肯定的结果且CPU运行正常后开始输入控制量。超过机械阈值的参数会被提升输入错误并且重新输入,输入正确的参数则被存入CPU的程序中作为计算控制量的依据。
PLC计算获得实际的播种量后在控制程序中进行匹配,根据设定值确定相应的调整量,并输出控制信号。系统共有14个数据输入点,其中有4个用于输入机械行驶速率信号,4个用于输入瞬时播种量信号,6个用于人机界面的系统参数设置。10个数据输出点中有3个用于输出步进电机运转信号,3个用于启动声光报警,4个用于输出播种量和系统的运行状态。系统中安装暂停复位程序,出现种箱排空或导种管堵塞的状况时可以暂停,待故障排除后继续运行。
4 试验结果
水稻机械播种量的控制试验在本单位的试验基地内进行,使用的水稻品种为天优华占。试验田块由机械整理,耕深20cm,形状规则,前茬作物为油菜。在水稻直播作业中,播种的行距较为稳定,而株距随机械状况的变化较大,是影响播种量的主要因素,因此本试验通过株距来反映对播种量的控制效果。试验设置机械的播种行距为20cm,株距为2.0cm,行驶速度为0.8、0.9、1.0、1.1m/s共4个。首先,采用人工控制,每个速度下完成0.1hm2的播种,待出苗后各取10个2m的路段测量平均株距。采用PLC控制,进行相同的播种和株距测量,并统计种箱排空和导种管堵塞的实际次数和报警次数。
试验结果如表1所示。由表1可以看出:人工控制的播种株距随机械行驶速度的变化较大,与设定值之间的差距明显,难以精确地控制播种量;在同一速度下,水稻出苗的均匀性差,部分区域存在秧苗过于稀疏或密集的情况,必然对最终的产量造成影响。PLC控制的播种株距随机械行驶速度的变化较小,与设定值之间的最大差异仅为0.1cm,表现出较高的控制精度。控制系统对所有故障都能及时准确地报警,避免出现空白的田块,且不同速度播种的水稻出苗分布均匀,为高产提供了保障。
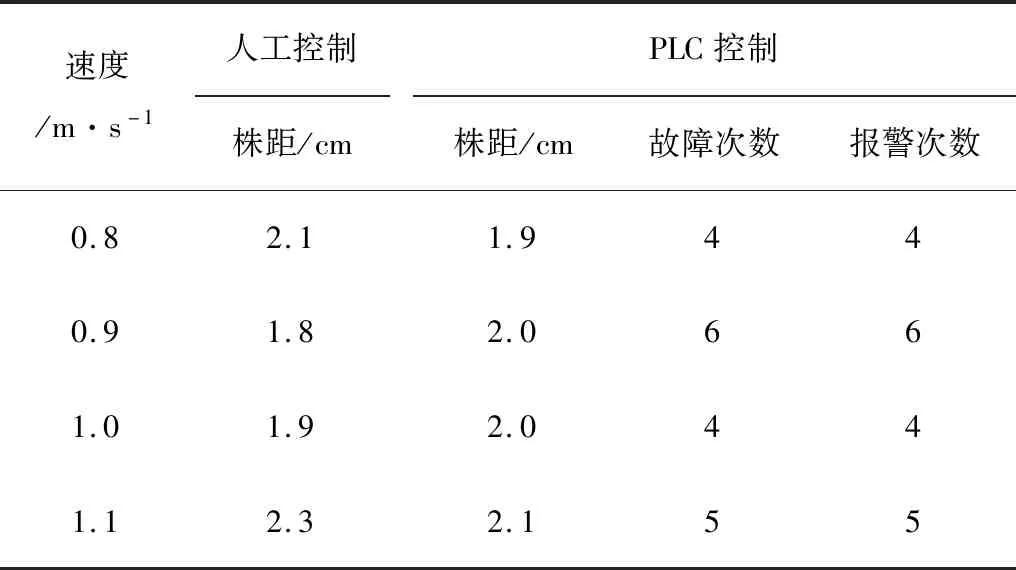
表1 播种量的人工控制和PLC控制效果Table 1 The effect of manual and PLC control to sowing rate
5 结论
为了提高水稻的机械播种精度,以PLC为核心设计了一个播种量控制系统。在2BD-10型水稻直播机上安装西门子S7型PLC,根据机械行进速率和高平电信号计算实际播种量,并与设定值进行比较。PLC生成控制指令驱动步进电机转动,通过调节排种轮上孔眼的尺寸来控制播种量,同时对种箱排空或导种管堵塞的状况发出报警。与人工控制方式相比,PLC控制的水稻播种株距变化及其与设定值之间的差异都较小,表现出较高的控制精度。控制系统对所有故障都能及时准确地报警,水稻出苗分布均匀,有利于获得高产,为实现水稻的机械化精量直播提供了技术支持。
猜你喜欢
河南农业·综合版(2021年2期)2021-03-24
河南农业(2021年2期)2021-03-14
湖北农业科学(2020年22期)2020-12-18
河南农业(2018年12期)2018-12-05
农业工程学报(2018年8期)2018-05-13
中国科技纵横(2015年2期)2015-11-05
中国水利(2015年19期)2015-04-20
科学中国人(2014年16期)2014-11-20
农家顾问(2014年6期)2014-06-30
中国新技术新产品(2014年3期)2014-03-24
