
陆空两栖农业信息采集机器人设计
2020-10-17 01:16张呈宇
农机化研究 2020年11期
张呈宇
(重庆财经职业学院,重庆 402160)
0 引言
随着我国农业机械化水平的提高和信息技术的发展,精准农业成为我们追求的目标。为了达到精准农业的目的,需要充分利用先进的技术对农业信息进行采集、存储、传递等,以供农业工作者对农业信息的查阅和使用。其中,快速采集农业信息是很重要的一个环节,也是精准农业亟待解决的问题之一[1-2]。
农业信息采集一般包括农田地理环境、土壤、水质等与农作物息息相关的信息,种类较多,不确定性较大。目前,国内外有很多机构正在对信息采集的方法进行研究。日本、美国等发达国家采用农用机器人实现对农业信息的采集,且利用风向仪、安装GPS接收器和联动悬架机构等手段以适应复杂环境[3]。我国则是通过将传感器安装在大型农业设备进行农业信息采集[4],易造成土地板结,且适应性差,信息采集难度较大。因此,可以借鉴国外的经验,采用质量较轻的机器人进行信息采集,并通过无线网络与主控计算机连接,实现对机器人的远程操控。该种机器人质量轻、易操控、动作灵活,不易对土地和农作物造成伤害。
进行农田信息采集时,需要适应不同的地理环境。若采用陆地机器人,则不能全方位、随时采集环境信息,尤其在遇到较高的障碍物时,行动受限,大大制约了机器人对农田信息的采集。因此,可以采用陆空两栖机器人进行作业,当遇到难以越过的障碍物时,以飞行的方式进行作业。本文将对陆空两栖的农业信息采集机器人进行研究。
1 硬件设计
1.1 总体布局
陆空两栖信息采集机器人主要由外部信息采集系统、内部信息采集系统、运动控制系统、控制器及数据收发系统组成,如图1所示。机器人的设计需要满足以下要求:①可以根据地形进行陆空两栖运动;②可根据实际需要配置多种传感器进行农业信息采集;③可进行远程操控。
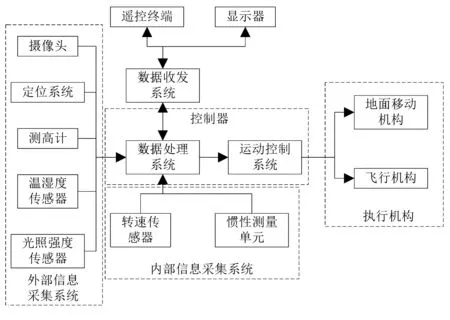
图1 陆空两栖农业信息采集机器人总体设计
1.2 外部信息采集系统
外部信息采集系统主要用于对所需要的农田信息进行采集,配置了测高器、定位系统和摄像头,并根据需要安装相关传感器,包括温湿度传感器、光照强度传感器等。机器人一般在陆地行驶采集信息,测高器随时监测地势高度,当遇到障碍物无法越过时,则自动转换为飞行模式。定位系统用于实施定位机器人的位置坐标,并与采集的农业信息一一匹配;摄像机用于随时监测周围环境信息。
1.3 内部信息采集系统
内部信息采集系统包括转速传感器和惯性测量单元。其中,转速传感器用于检测驱动电机的转速,惯性测量单元用于监测机器人的平衡,并将机器人的信息传递给数据处理系统,用于对执行机构的控制。
1.4 控制器
控制器由数据处理系统和运动控制系统组成。数据处理系统对获得的内、外部信息进行处理,包括将各传感器信息转换为设备可识别的数字信息,以及机器人要进行的动作,并将处理的信息结果传递给数据收发系统,同时向运动控制系统传递机器人的动作指令,由执行机构执行下一步动作。
1.5 执行机构
执行机构即为机器人本身,由地面移动机构和飞行机构组成,如图2所示。
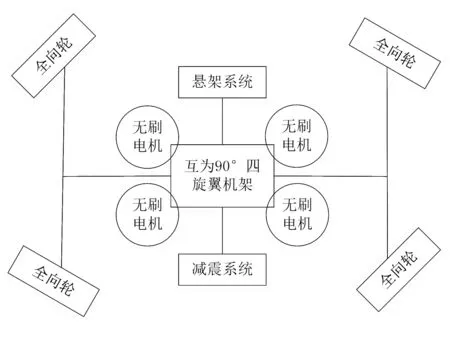
图2 执行机构总体结构示意图
地面执行机构为4个全向轮机构,使机器人在陆地可以任意方向行走,也可以原地转弯,保证了机器人在陆地上的灵活性。配置4个驱动器以提高机器人的动力,同时配置悬架系统和减震系统,以提高机器人在行走时的减震性能。
飞行机构为四悬翼飞行机构,为使机器人的质量较轻,其材料选用碳素材料。飞行机构的配置不仅可以提高机器人的越障能力,还可以在空中进行全方位的信息采集,避免农田信息采集的缺失[5]。
1.6 数据收发系统
数据收发系统是对陆空机器人远程操控的纽带,采用无线传感网络连接遥控终端和数据处理系统进行农业信息的传输。工作人员通过遥控终端,利用显示器的数据对机器人进行人工操控,也可以在机器人工作之前预设工作路线,机器人自动进行农业信息采集。
2 机器人控制算法
2.1 地面姿态控制
假设机器人所在的坐标系为XaOaYa,所在的惯性坐标系为XbObYb,则对于机器人有
Vby=ωbz·Xitc
其中,V1bx、V2bx分别为机器人的两个主动轮在惯性坐标系的纵向速度;Vbx、Vby分别为机器人重心位置的纵向和横向速度;ωbz为偏航角;Xitc为转弯时中心在XaOa轴的投影。在对机器人运动进行计算时,可将其设定为几个定值进行计算[6]。由于机器人为2个主动轮和2个从动轮,因此还存在以下关系,即
V1bx=V3bx,V2bx=V4bx,V1by=V3by,V2by=V4by
其中,Vibx、Viby(i=1,2,3,4)分别为机器人的主动轮和从动轮在惯性坐标系的横向和纵向速度。通过对上式求解可得
V1by=V2by=(a-Xitc)·ωbz
V1by=V2by=(a-Xitc)·ωbz
V3by=V4by=(b+Xitc)·ωbz
2.2 飞行姿态控制
为保证机器人能够起飞,且在空中完成飞行时要求的动作,首先需要对其推力进行估算。机器人的马达与扇叶转动配合使机器人完成飞行动作。机器人受到的推力F为
(CL0+CLα+α)]
其中,n为机器人马达所配的扇叶数量;T为单个叶片可以提供的推力;K为马达系数;Ct为马达扇叶尖端处的长度;CLO为机器人升力为零时的攻角系数;CLα为升力上升的斜率;α为马达扇叶的攻角。
通过利用采集到的机器人四旋翼的各个角度,对机器人的飞控系统建立数学模型。首先,利用四元数算法将采集到的角度转换为机器人的实际偏角。机器人绕X轴、Y轴和Z轴的旋转角ξ、μ、σ分别为
ξ=arcsin[2(δ0·δ2-δ1·δ3)]
机器人绕X轴、Y轴和Z轴的旋转角在地坐标系的余弦分别为
通过以上关系式可以计算得出机器人四旋翼的空间坐标系,即
2.3 机器人稳定姿态自调整
为实现机器人姿态的自调整,采用PID控制算法进行调整[7-8]。机器人地面运动的PID控制算法流程图如图3所示。
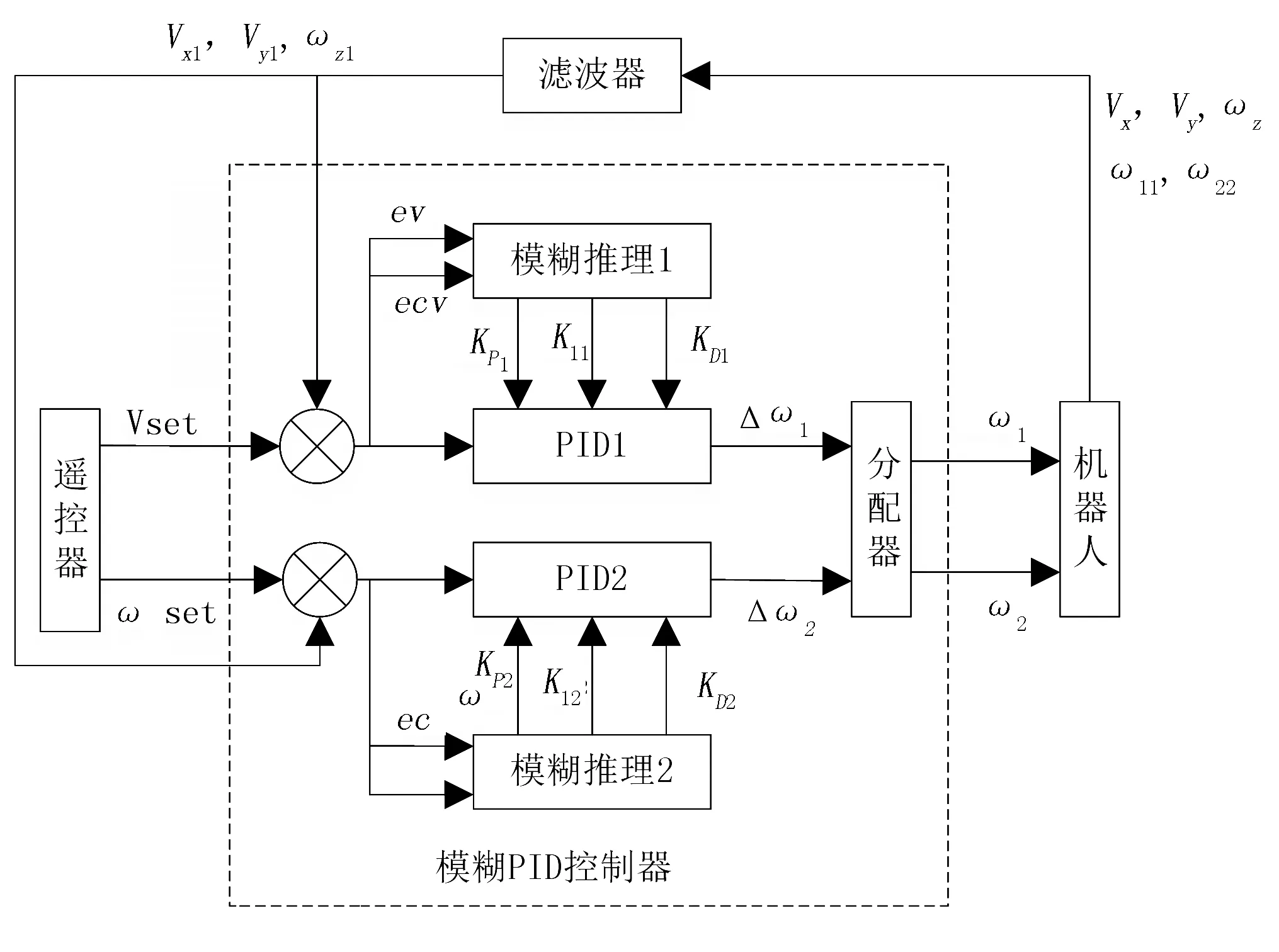
图3 地面运动PID控制算法流程图
图3中,Vset和ωset分别表示设定的机器人的运动状态;ω1和ω2分别表示控制器测得的电机转速;Vx、Vy、ωz分别表示由IMU测得机器人的速度和转速;ω11和ω22分别表示转速传感器测得的机器人车轮转速;Vx1、Vy1和ωz1分别为滤波器测得的机器人的速度和转速。该模糊PID控制算法包括两个PID控制模块和一个参数分配器。
机器人在飞行过程中的姿态控制主要包括角度的控制和高度的控制。角度的控制为串级PID控制算法,由PID控制算法的外环角度控制环和内环角度控制环共同进行飞行姿态角度的控制。飞行姿态角度的滚转角、偏航角等角度的控制方法近似,以偏航角为例,其控制流程如图4所示。机器人的飞行高度利用测高计进行测量,并通过PID控制算法进行控制,由此可以完成对机器人的地面和飞行状态的姿态控制。
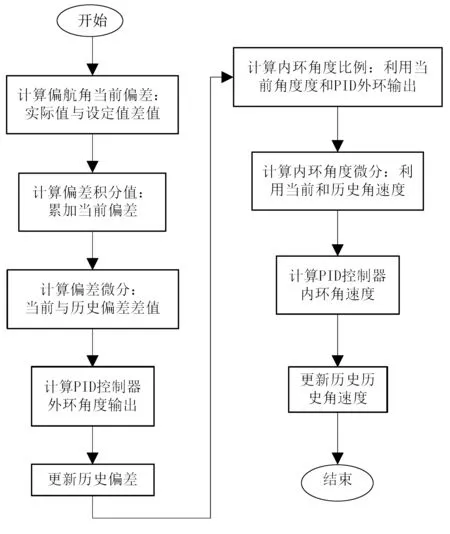
(a) 角度控制
3 试验结果
根据陆空两栖农业信息采集机器人的性能要求,需要对其进行试验测试。试验思路如下:①测试机器人运动模块是否可以完成陆空两栖运动;②测试机器人是否可以进行准确的农业信息采集。
3.1 运动模块测试
将机器人在陆地进行测试,在陆地布置不同尺寸的障碍物,尺寸分别为宽度为1m和2m的正方体。首先使机器人在陆地进行左右前后和原地打转的动作,再将其按照直线行驶,并在中途设置障碍物,检验机器人是否能够根据障碍物尺寸改变运动状态。机器人的运动试验结果如表1所示。

表1 机器人运动试验结果
由表1可知:该机器人可以完成陆地的直行、转向运动,当遇到障碍物时可以自动调整运动状态为飞行模式,并可控制完成需要的各项运动,包括直行和转向,该运动模块可以为机器人信息采集提供良好的运动支持。
3.2 信息采集模块测试
在运动模块的测试环境下,对路径上设定的坐标位置的温度、湿度、高度和光照强度进行测试,并手动对这些坐标位置的农业信息进行测试,对比显示器的参数和手动采集的结果,验证机器人的农业信息采集结果的准确性。测试结果表2所示。

表2 机器人信息采集结果
由表2可知:机器人的信息采集结果的误差很小,均小于2%,可以满足农业工作人员对于农业信息采集的要求。
4 结论
1)陆空两栖农业信息采集机器人主要由外部信息采集系统、内部信息采集系统、运动控制系统、控制器及数据收发系统组成。
2)机器人通过地面移动机构完成地面的行走,飞行机构提高越障能力,采用PID控制算法进行陆地和飞行姿态的控制,提高了运动稳定性。
3)试验结果表明:该机器人可以完成陆地和飞行的控制,且能完成农业信息的全方位采集,满足农业人员对农业信息采集机器人的性能要求。
猜你喜欢
大科技·百科新说(2022年4期)2022-05-30
小哥白尼(军事科学)(2019年7期)2019-11-16
电子制作(2019年15期)2019-08-27
制造技术与机床(2017年6期)2018-01-19
科技视界(2017年8期)2017-07-31
小哥白尼·趣味科学画报(2016年1期)2016-05-30
学苑创造·B版(2015年10期)2015-11-13
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20
