
光电检测与视觉设计在农机化数字设计中的应用
2020-10-17 01:16简川
农机化研究 2020年11期
简 川
(宜春学院,江西 宜春 336000)
0 引言
随着机械自动化技术的不断发展和大面积种植作业的推广,农机市场的需求量越来越大,同时技术的成熟、竞争的加剧,消费者需求成为买方市场中的主导因素。在满足基本功能需求的前提下,“形式追随功能”不再是产品造型中唯一的法则,如何传递出用户想要的视觉感受成为了产品造型设计的重点。在农机产品的数字化设计过程中,除了农机建模、装配和仿真之外,农机的视觉设计也可以通过数字化来实现,从而提高农机的视觉传达效果。
1 基于光电检测的农机数字化设计
在复杂的农机零部件设计时,由于曲面等形状的不规则性,其形状和尺寸的设计是非常困难。为了提高设计效率,往往采用零件扫描的方法,将扫描得到的零部件导入到电脑中进行优化设计。目前,通常是应用嵌入式中央控制及工业级图像高速传输控制技术,采用基于CCD/CMOS与DSP/FPGA的图像识别与处理技术,搭建光电检测系统,其总体框架如图1所示。在建模之前首先采用光电检测模块对复杂零部件的三维坐标点进行扫描,扫描时一般采用数控三坐标测量机,扫描完成后将扫描得到的数据导入到UG软件中创建三维模型。三维模型创建完成后,在UG软件中对模型进行修改和优化,如添加曲线或曲面、添加加强筋和肋板等,还可以参考视觉设计方法,对模型的视觉传达效果进行优化。

图1 光电检测扫描建模系统Fig.1 The photoelectric detection scanning modeling system
2 基于图像处理的农机视觉建模设计技术
为了实现农机的数字化设计,提高农机的视觉传达效果,在农机的设计过程中首先通过光电检测技术实现三维模型的坐标测量,并重新建模形成新的模型,然后通过视觉设计对模型进行优化,从而实现农机视觉传达效果的优化。在进行农机部件三维坐标测量时,主要采用的光电信号检测元件为CCD/CMOS相机,经过A/D转换后由DSP/FPGA芯片进行信号采集。农机部件采集处理过程如图2所示。
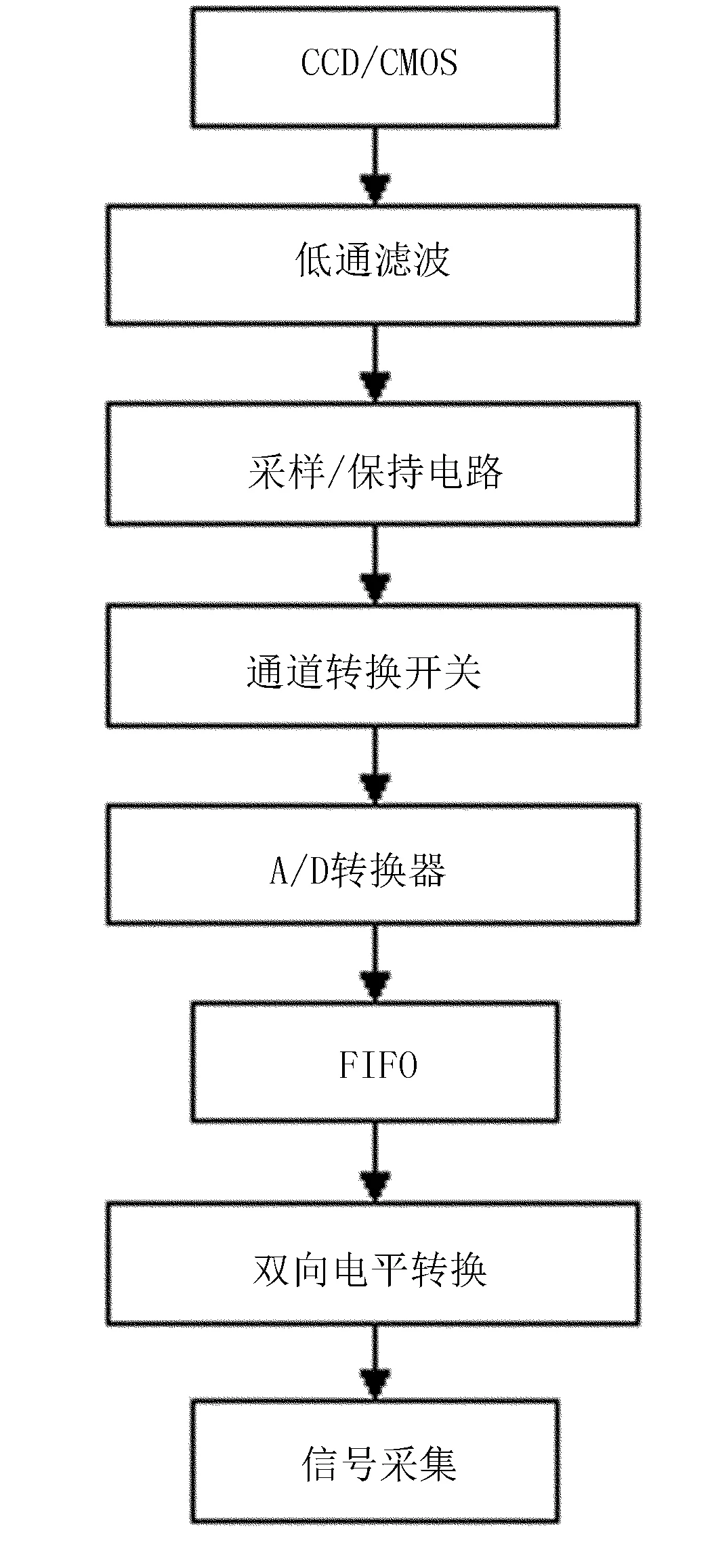
图2 图像采集处理过程Fig.2 Image acquisition and processing
为了实现农机零部件的三维建模,在图像采集完成后需要对图像进行分割处理,实现图像的自动检测和匹配,包括二值化、边缘纹理分割及搜索匹配。假设采集得到的图像被分割为m个区域,用符号可以表示成{A1,A2,…,Am},其异源基准图像分割为n个区域,用符号可以表示成{B1,B2,…,Bm},图像点既位于实时图中,又位于其异源基准图像中,则融合后区域点的标识记为(A1B1,A1B2,…,A2B1,A2B2)。标识AiBj表示该点在实时图中位于区域i,在基准图中位于区域j,算法匹配过程如图3所示。
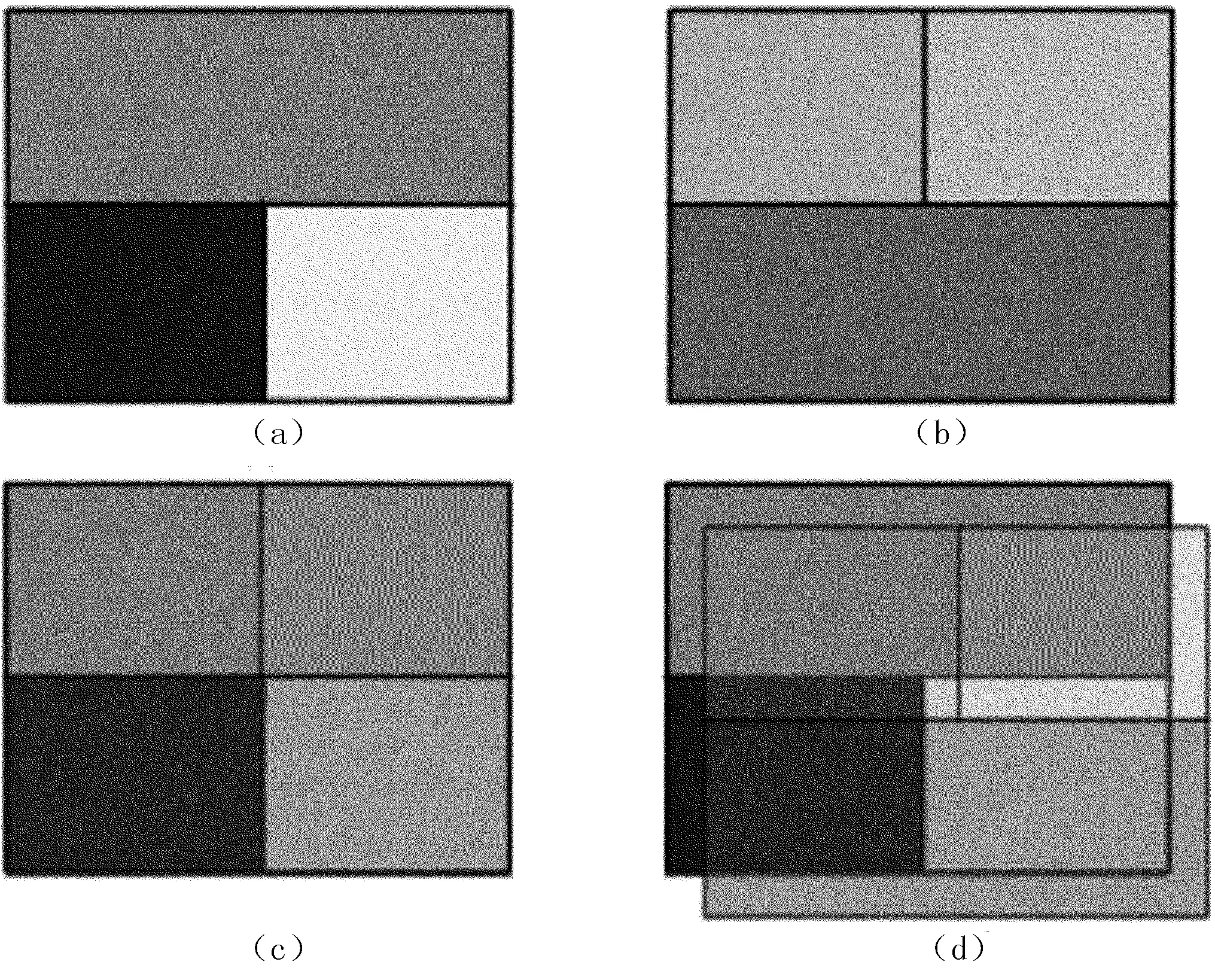
图3 图像匹配过程示意图Fig.3 The schematic diagram of image matching process
图3中:(a)为实时图,被分割为3个区域,可以表示为{A1,A2,A3};(b)为异源基准图,被分割为3个区域,可以表示为{B1,B2,B3},分割结果间存在区域合并、过分割现象;(c)表示的是如果匹配正确显示的融合结果;(d)表示的是如果匹配错误显示的融合结果。一幅二值图像区域的面积可以表示为
(1)
在图像匹配后需要对图像的位置进行定位,在二值图像中,图像的质心位置和中心位置相同,其计算公式为
(2)

(3)
计算得到农机零部件图像的质心位置后,还要确定图像的方向,假设一幅二值图为B[i,j],计算物体点到直线的最小二乘方拟合,使所有物体点到直线的距离平方和最小,即
(4)
其中,rij为物体点[i,j]到直线的距离。一般把直线表示成极坐标形式,即
ρ=xcosθ+ysinθ
(5)
如图4所示,θ为直线的法线与x轴的夹角,ρ为直线到原点的距离。
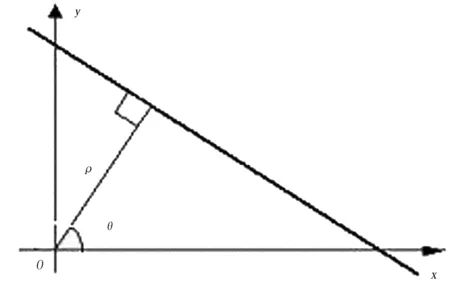
图4 直线的极坐标表示Fig.4 The polar representation of a line
把点(i,j)坐标代入直线的极坐标方程得出距离r,其表达式为
r2=(xcosθ+ysinθ-ρ)2
(6)
将方程(6)代入方程(4)并求极小化问题,可以确定参数ρ和θ,则有
(7)
令χ2对ρ的导数等于零,求解ρ得
(8)
χ2=acos2θ+bsinθcosθ+csin2θ
(9)
其中的参数为
(10)
由于是二阶矩,表达式χ2可重写为

(11)
对χ2微分,并置微分结果为零,求解值为
(12)
因此,惯性轴的方向由下式给出,即
(13)
所以,由χ2的最小值可以确定方向轴,如果b=0、a=c,那么农机零部件就不会只有唯一的方向轴。确定农机零部件的方向后,便可以提取关键点,生成农机零部件的模型。
3 农机数字化设计
在农机及零部件的设计过程中,由于很多零部件以往都有设计过,可以直接用来使用,但遇到较为复杂的零部件时,设计难度较大,没有现成的零件可以直接使用,只能重新建模。在设计零部件时,可以通过光电检测的方式将原来的零部件进行重新建模,将大大提高零部件的建模效率,通过重新建模还可以增强农机的视觉传达艺术效果。
图5为徐州工业中心设计的甘蔗机的外形示意图。甘蔗机从外观的颜色和形状来看都具有较好的视觉传达效果,动感的外形和大气的外观,对于使用收割机作业的人员来说将产生较大的工作动力,使其适应枯燥的收割作业环境。在农机复杂零部件设计时,以发动机的盖板为例,其表面形状较为复杂,采用传统的方法很难测量其尺寸和形状,而采用数控三坐标方法,可以成功地采集到盖板的点云数据,如图6所示。

图5 徐州工业设计中心设计的甘蔗机Fig.5 The sugar cane machine designed by Xuzhou industrial design center

图6 采集得到的数据点云图Fig.6 The collected data point cloud image
将拖拉机的发动机盖板固定到三坐标测量机上,确定在3个轴向方向上不能移动,然后可以在电脑上点开三坐标测量机快捷图标进行测量,得到了如图7所示的点云数据。

图7 模型成型和修改Fig.7 Model forming and modification
如图7所示,在采集到点云数据后,可以将点云数据导入到UG软件中,然后在软件中生成盖板的三维模型;模型生成后,可以根据视觉传达效果对模型继续修改,最终得到了如图8所示成品。

图8 农机数字化造型设计Fig.8 The digital modelling design of agricultural machinery
对模型进行一系列的修改后,包括编辑、插入、分析、装配等,得到了农机发动机盖板非常好的视觉模型。修改优化时主要参考了视觉传达效果设计方法,以动力性为主要依据,同时要兼顾安全性的视觉传达。
4 结论
在农机复杂零部件的设计过程中,为了提高其设计效率,将光电检测方法和视觉设计技术引入到了零部件的设计上,并采用UG软件搭建了数字化设计平台,并对该方法的可行性进行了验证。验证结果表明:采用光电检测方法可以成功地得到发动机盖板的三维点云数据,并可以在UG软件中生成三维可视化模型,通过对模型的修改和视觉设计,得到了很好的视觉传达效果,对于农机复杂零部件的设计及造型研究具有重要的作用。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
中小企业管理与科技(2022年6期)2022-06-14
建材发展导向(2022年1期)2022-03-08
今日农业(2021年4期)2021-11-27
纺织器材(2021年5期)2021-11-11
广州文博(2020年0期)2020-06-09
中国化肥信息(2019年5期)2019-06-25
纺织器材(2017年2期)2017-04-20
兽医导刊(2016年6期)2016-05-17
中国民族医药杂志(2016年2期)2016-05-14
