声呐浮标漂浮性能分析
2020-10-17 12:09程浩
声学与电子工程 2020年3期
程浩
(第七一五研究所,杭州,310023)
声呐浮标(下文简称浮标)是一种主要的航空搜潜装备,空投入水后,漂浮装置保持直立姿态漂浮于水面。水下传感器借助传输电缆下沉到预设的工作深度,将接收到的目标信号经过放大、滤波等处理,调制成高频信号,天线向空中发射,由飞机上的设备进行接收。浮标的无线电天线和GPS天线均安装在漂浮气囊内。在波浪的激励下,浮标会出现摇摆现象,若漂浮气囊倾倒,将会减小无线电作用距离,导致GPS位置信息无法实时更新,影响通信链路的稳定性和可靠性。浮标是一种系列化的多类型产品,各种类型的组成模块大同小异,本文根据浮标的重心位置、浮心位置及摇摆的固有周期,研究浮标漂浮性能。
1 浮标漂浮状态
浮标处于漂浮状态时,漂浮气囊与水面电子仓形成密封舱体漂浮在水面,无线电天线和GPS卫星天线安装在漂浮气囊内,水面电子仓下悬挂有传输电缆和传感器等相关组件,如图1所示。
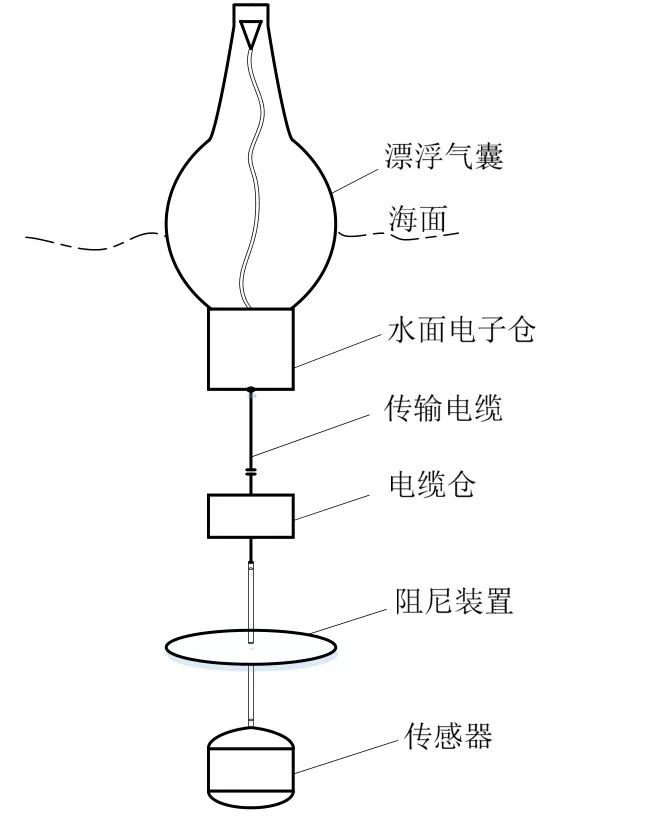
图1 浮标漂浮状态示意图
研究浮标漂浮性能时,简化水下悬挂物部分,近似为没有体积的质点附属在水面电子仓的下端面。忽略海水的阻尼力,浮标静止漂浮在海面时,受到重力、排水产生的浮力以及悬挂物的拉力。漂浮平衡条件是受到的外力之和为0。图2为浮标漂浮海面时受力情况。
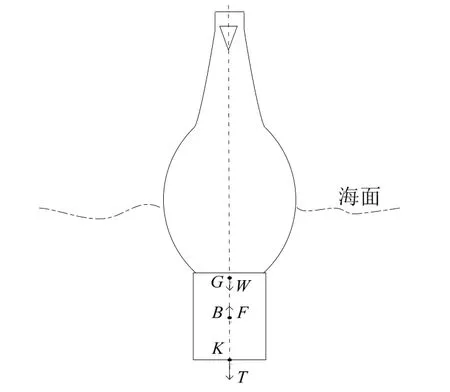
图2 浮标平衡状态受力图
浮标形状成轴对称性,浮力F的作用点即浮心B是排开水体积的形心,在中心轴线上;水面电子仓内零部件的质量几乎对称分布,故整体重心G在中心轴线上;悬挂物产生的拉力作用点设置在端面中心点K,因此,浮标静止漂浮时,重力W、浮力F和拉力T作用在同一铅垂线上,且T+W=F。
2 浮标稳定性
根据船舶稳定性理论[1],物体悬浮在水中时,其稳定平衡的条件是重心必须在浮心之下;物体漂浮在海面时,其稳定漂浮时重心与浮心的相对位置已经不是决定因素,取决于物体转动后产生新的浮心位置。
浮标漂浮气囊的形状近似椭球形,静止状态时,水线面过对称面,水线面的形心称作漂心。如图 3所示,浮标受风浪影响摇摆时,产生倾角θ,新的倾斜水线仍过漂心,漂浮气囊出水的体积等于入水的体积,并且倾斜前后排开水的体积的大小没有变化,但随着倾斜浮标浸入水中的形状发生变化,浮心的位置由B点变为B1点;浮标的重量在倾斜前后没有改变,故重力大小及作用点与静止时相同;悬挂物通过传输电缆连接在端面上,其拉力T方向仍沿铅垂线方向,大小不变。此时,浮心和重心及拉力作用点的位置不再位于同一铅垂线上,浮力在新的浮心作用点相对于原浮心产生力矩MF,同时,拉力T相对于原浮心也产生力矩MT。重力W相对于原浮心也产生力矩Mw。将MF、Mw与MT之和定义为恢复力矩MR,若恢复力矩与倾斜力矩的方向相反,则会起到抵抗倾斜力矩的作用,MR为正值。此时,倾斜力矩消失,恢复力矩能使浮标恢复到平衡位置。若恢复力矩与倾斜力矩的方向相同,不仅不能抵抗倾斜,反而促使浮标继续倾斜,此时MR为负值。
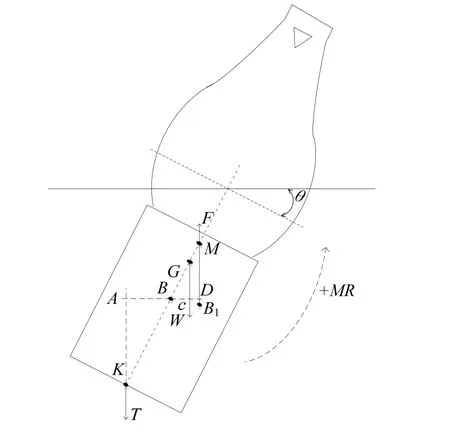
图3 浮标倾斜时受力分析
浮标倾斜时,产生的恢复力矩MR满足:

当MR等于0时,外力消失后,浮标不会回到原来位置,也不会继续倾斜。浮标倾斜前的原浮心作用点与重心作用点的连线称为浮轴,BG两点之间距离记作e;浮标倾斜后的浮力作用线与浮轴的交点称为稳心,即点M,BM两点之间距离称为稳心半径,记作r。浮标倾斜时,浮力作用线总是过稳心M[2]。
3 浮标特例分析
在某一型浮标实际使用过程中,发现无线电天线作用距离过短。对这一现象进行分析,发现浮标的漂浮气囊倒伏在水面,不能自动扶正。原因是当浮标水下悬挂物在匀速下降过程中,悬挂在水面电子仓上的悬挂物产生拉力为0,即T等于0。此种情况下,浮标倾斜时,产生的恢复力矩无法使其回正。
当浮标悬挂物拉力消失后,仅受到重力W和浮力F的共同作用。重力和浮力大小相等,方向相反,作用在同一铅垂线上。产生倾角θ时,浮力与重力形成一个力偶,使浮标回到原来平衡位置,恢复力矩MR表示为:

式中,e为重心与浮心间距。在进行浮标总体布局设计时,浮标的重心、浮心及稳心之间相对位置可能存在多种情况,需要对每一种情况的稳定性能进行分析。
(1)重心G在浮心B之下,浮标倾斜角为θ时,浮力与重力产生的力偶距与倾斜力矩方向相反,当外力消失时,该力偶距能使浮标恢复至平衡状态,如图4(a)所示,稳心M在重心G之上,MR为正值。
(2)重心G在浮心B之上,浮标倾斜角为θ时,浮力与重力产生的力偶距与倾斜力矩方向相反,当外力消失时,该力偶距能使浮标恢复至平衡状态,如图4(b)所示,稳心M在重心G之上,MR为正值。
(3)重心G在浮心B之上,浮标倾斜角为θ时,浮力与重力产生的力偶距与倾斜力矩方向相同,当外力消失时,浮标继续倾斜而不再恢复至原来的平衡状态,如图4(c)所示,稳心M在重心G之下,MR为负值。
(4)重心G在浮心B之上,浮标倾斜角为θ时,稳心M与重心G重合,浮力与重力产生的力偶距等于 0,当外力消失时,浮标不会回到原来位置,也不会继续倾斜,如图4(d)所示,MR为0。
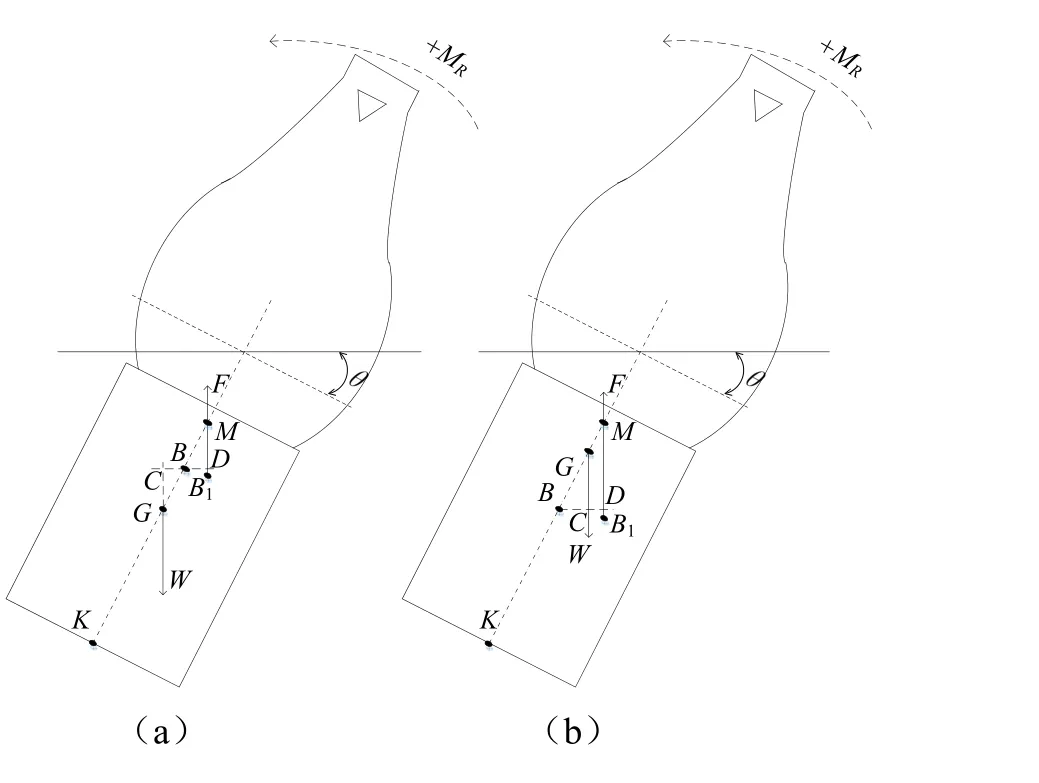

图4 浮标重心与稳心的关系
在浮标设计时,上述(3)、(4)两种情况是不允许出现的,浮标倾斜后不能恢复到原来的平衡位置。对于情况(1),重心在浮心之下,浮标倾斜时,稳心始终在重心之上,必然会产生正的恢复力矩,浮标可以自动扶正。在浮标设计时,尽量使重心在浮心之下,但是水面电子仓内要放置电池及电路板,受空间及重量的限制,有时很难做到这一点。这时可以考虑情况(2),重心在浮心之上,相距较近,使稳心在重心之上,浮标可以自动扶正,如果重心过高,就可能出现情况(3)或情况(4)。
4 浮标漂浮摇摆周期
浮标在水中自由摇摆时,可以用倾斜角和角加速度来分析运动情况。浮标摇摆时出水的体积等于入水的体积,并且是等体积倾斜,浮标自由摇摆时受到以下力矩[3-5]。
(1)恢复力矩
浮标倾斜角为θ时,产生恢复力矩MR:

式中,d为稳心与重心间距。根据船舶原理相关知识,r可以由式(4)求得

式中,I为质量相对于过重心(质心)且垂直于纵剖面的轴的转动惯量;∇为排开水体积。
(2)阻尼力矩
物体摇摆时,与水之间存在相对速度,必然受到阻力。但是,浮标的摆动角度较小,与水接触部分体积较小,并且漂浮气囊表面光滑,所以阻尼力矩可以忽略。
(3)惯性力矩
浮标摇摆过程中存在角加速度,必然产生惯性力矩。浮标本身惯性力矩Mθ与角加速度成线性关系。

式中,μ为倾斜角的角加速度。根据平衡条件,合力矩为0,则有

浮标倾角较小,sinθ≈θ,μ是θ的二阶导数,解方程得

式中,Aθ为倾角幅值,t为时间,δ为初始相位角,为浮标摆动的固有频率。

式中,Tθ浮标自由摇摆时固有周期。
浮标摇摆时,固有周期与其转动惯量、重量、重心、浮心和稳心的相对位置有关,在浮标设计时,尽量使浮标摇摆周期远离波浪起伏周期,避免产生共振。可以通过提高浮标转动惯量提高浮标固有周期,也可以通过减小稳心和重心间距与重量的乘积来提高浮标固有周期。
5 结论
浮标漂浮稳定性与重心、稳心及浮心的位置有关;摇摆周期与转动惯量、重量、稳心与重心的间距等参数有关,设计浮标时应综合考虑这些参数对稳定性和固有周期的影响。在浮标重量及浮力一定的前提下,调整浮标尺寸及内部零部件分布,增大恢复力矩,可以提高浮标抗风浪性能;从稳定性出发,重心要比稳心低,重心低一些,稳心高一些,可以增加浮标恢复力矩;但是稳心过高时,浮标摇摆固有周期短,受风浪影响摆动较剧烈。
猜你喜欢
垂钓(2022年3期)2022-05-14
初中生学习指导·提升版(2022年2期)2022-03-08
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
河北理科教学研究(2020年2期)2020-09-11
垂钓(2019年2期)2019-09-10
北京航空航天大学学报(2017年1期)2017-11-24
高中生学习·高三版(2017年9期)2017-10-26
中国煤炭(2016年9期)2016-06-15
读写算·教研版(2016年6期)2016-03-28