声呐浮标的关键结构设计
2020-10-17 12:09程浩
声学与电子工程 2020年3期
程浩
(第七一五研究所,杭州,310023)
声呐浮标(下文简称浮标)主要装备于反潜飞机,它与机载声呐处理系统一起,依据水下目标在海洋环境条件下的特征,对目标进行搜索、识别、定位和跟踪,并为攻潜武器的使用提供目标指示,是航空搜潜的主要手段。浮标具有系列化的标准尺寸、体积小、重量轻、接口简单、互换性好且使用灵活,便于与其它搜潜装备开展协同探测[1-2]。
1 浮标组成及工作状态
1.1 浮标组件
浮标具有标准的外形尺寸[3],A尺寸长914 mm,G尺寸长419 mm,F尺寸长为304 mm,外径均为124 mm。浮标一般由外壳组件、减速降落机构、水面漂浮组件、水中悬浮组件和水下声学组件组成。其中,外壳组件将其各部分封装在一起形成有机整体。浮标的实体组成如图1所示,这些模块化的零部件具有良好的继承性、通用性和扩展性,可以根据浮标类型,选取相应模块进行组合。
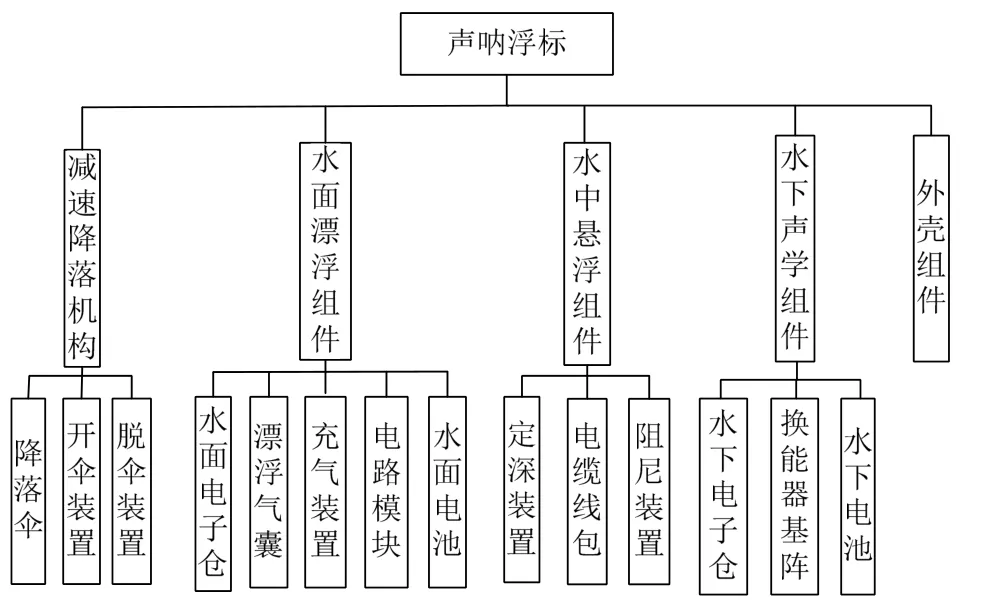
图1 声呐浮标实体组成
1.2 浮标工作状态
浮标一般由反潜飞机空投使用,离机后在减速降落机构的作用下,姿态调整至稳定状态下落;浮标接触水面时,充气装置对漂浮气囊充气,膨胀的漂浮气囊迫使浮标分解,水面漂浮组件上浮至海面,水中悬浮组件定深并释放传输电缆,水下声学组件下沉至预设深度并展开换能器基阵。浮标开始工作,接收目标辐射噪声或者发射声脉冲并接收回波信号,同时接收其它声呐设备发射的声波经目标反射而产生的回波信号;接收的水声信号经过放大、滤波等处理,调制成高频信号,经漂浮气囊内置的高频天线向接收设备传输;浮标可以实时接收遥控指令执行相关动作,完成使命后自沉海底。
浮标的使用过程可以分为投放状态和漂浮状态两个阶段。投放状态是离机-稳定降落-入水解体:离机时要求开伞装置可靠,降落伞快速充气;稳定降落时浮标姿态稳定,摆动幅度较小;入水解体时要求外壳组件能够承受水面冲击力,并能减缓冲击力对内部结构的影响。漂浮状态是浮标的长时工作状态:水面漂浮组件稳定漂浮在海面,支撑内置高频天线和卫星天线进行通信,并为水下部分提供足够浮力;水中悬浮组件将水面漂浮组件与水下声学组件连接在一起,并传输信号;水下声学组件在预设深度展开换能器基阵,并处于发射或接收水声信号状态。
2 浮标总体布局
浮标是具有相互依存功能的机械结构、电子器件、特性材料和能源装置的一种组合。浮标结构是使声学模块、电路模块、通信模块和电源模块组合在一起的骨架,也是完成具体动作的执行机构,是浮标完成使命任务的重要保障。在方案设计时,根据任务书要求选定尺寸规格,确定各模块具体结构参数。在总体布局时必须综合考虑各电气模块之间的电磁兼容性、发射模块的散热性能、罗盘模块防磁干扰等因素;同时,考虑浮标的重量、重心、浮心和转动惯量等力学参数,使浮标具有良好降落姿态和漂浮稳定性,倾斜角度小于 10°~15°时,可以自动恢复竖直状态,漂浮摇摆周期远离波浪起伏周期,避免出现共振。浮标能够实现投放和漂浮两种工作状态,其主要部件从上到下依次布局如图2所示。
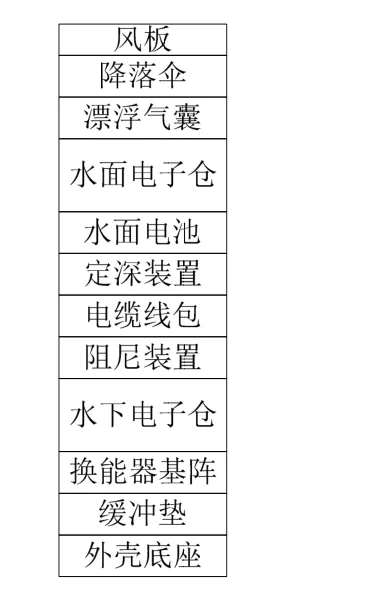
图2 浮标功能模块布局示意图
3 浮标关键结构设计
3.1 降落伞
目前,降落伞是使用最广泛的气动力减速装置,空投浮标基本上都采用降落伞来稳定其空中姿态,调整其入水速度和入水角度。
3.1.1 伞衣的面积
伞衣是降落伞的主要组成部分,是降落过程中的阻力面,直接决定了降落伞的气动系数。按照浮标稳定下降的条件设计伞衣的面积:

式中,m为浮标质量,kg;g为重力加速度,m/s2;v为浮标稳定下降速度,m/s;Cd为降落伞阻力系数,无量纲;ρ为空气密度,kg/m3;S为伞衣面积,m2。参照降落伞理论知识[4]选择开伞快、动载小、稳定性好的伞形,根据伞形的长宽比例关系,可以计算出伞衣的结构尺寸。
3.1.2 伞绳的主要参数
伞绳的长度影响着伞衣的投影面积和阻力系数,伞绳的数量是保持伞的形状和充满状态的基本条件。降落伞参数示意图如图3所示。
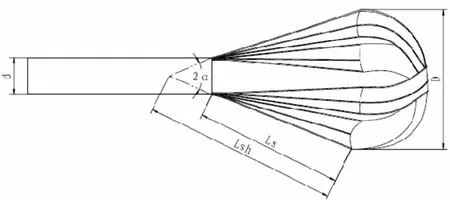
图3 降落伞参数示意图
根据式(2)可以确定伞绳的长度,确定伞绳的抗拉强度,决定伞绳的数量。
式中,ξ、η、Kd、Kb、fsh为比例常数,无量纲;D0、D、d分别是伞衣展开直径、降落伞投影直径和浮标直径,mm;Ls、Lsh分别是伞绳实际长度和名义长度,mm;Fkmax、Fsh、psh分别是开伞冲击载荷、伞绳张力和伞绳断裂强度,N;Lυ为伞绳拉直速度,m/s;n为伞绳数量。
影响浮标入水速度的因素主要有伞衣面积及阻力系数,相同材料的伞衣,面积越大,阻力越大,入水速度越小。影响阻力系数的因素主要有伞形、伞绳长度、伞衣透气量等,阻力系数的取值要综合考虑这些因素的影响。
浮标降落伞为十字形伞,具有阻力系数大、开伞快、动载小、稳定性好等气动性能,安装在浮标顶部,保证了浮标具有良好的投放姿态。依照浮标降落伞的计算方法,可以快速设计适用于重量轻、尺寸小的空投物减速伞。
3.2 开伞及脱伞装置
浮标的开伞装置主要由风板、扭簧、伞袋、塑料环、脱落板和伞环组成。伞绳与伞环连接,伞环卡在塑料环、脱落板和外壳筒三者之间,即降落伞通过伞环与浮标本体连接。将降落伞装入伞袋内,折叠后放置在由风板、塑料环和脱落板组成的封闭容腔内。风板在扭簧的作用下,会自由翻转,风板自由翻转将降落伞从容腔内释放出来,实现开伞。
浮标入水后,充气装置对漂浮气囊充气,漂浮气囊迅速膨胀对脱落板产生的推力T迫使其产生如图4所示的虚线变形,脱落板的中心出现β角变形时,端部产生位移δ,脱落板连同塑料环从外壳筒内顶出。塑料环被顶出的同时,伞环也被带出,实现脱伞。
图4 脱伞装置示意图
浮标开伞装置借助扭簧的回位实现风板的翻转,将降落伞打开,不需要能源装置提供动力,结构简单,动作可靠,环境适应性强。浮标脱伞装置借助漂浮气囊膨胀推动脱落板形变来实现,设计巧妙,在脱伞的同时可以使浮标分解,不需要单独的动力,节省空间。
3.3 漂浮气囊和充气装置
漂浮气囊的形状便于为浮标提供浮力,支撑无线电天线竖起,满足天线长度要求;漂浮气囊可以采用弹性薄膜,经过加热压合成形。在浮标未工作时可折叠在一起,具有体积小的特点。另外,漂浮气囊内安置有浮标自毁装置,当浮标工作结束时可以自沉海底。
充气装置主要由弹簧、杠杆、撞针、高压气瓶、尼龙线、电阻丝和电池等组成,用于给漂浮气囊充气,促使浮标解体。触发前,弹簧被尼龙线预紧,电阻丝缠绕在尼龙线上;工作时,电池给电阻丝供电,电阻丝发热,熔断尼龙线,释放弹簧储存能量,带动杠杆机构推动撞针迅速动作,击破高压气瓶封口,高压气体冲出,对漂浮气囊充气。
充气装置的结构简单,体积小,重量轻,制作工艺简单,成本低,可靠性高,可以广泛应用于救生、防撞装置的气囊充气。
3.4 水面电子仓
水面电子仓由仓筒、仓盖和仓座构成,与漂浮气囊等组成密封舱体。水面电子仓上设计有测试口和设置按钮,分别用于浮标测试和参数设置。水面电子仓需要承受内部气压,因此壁厚设计时要进行耐压强度计算。由最大主应力理论可知,内压圆柱壳体的应力为

式中,p为内压力,MPa;D1为仓筒平均直径,mm;t为仓筒壁厚,mm;σ为仓筒应力,MPa。当仓筒应力小于选择材料的许用应力时,满足强度要求。
3.5 定深装置
浮标受尺寸限制,没有足够空间安装一套升降机构来调节水下声学组件深度,因此固定了几档深度。当浮标入水后,定深机构释放设置的档位,水下声学组件下沉到预设深度,实现定深。随着使用情况的变化,可以遥控定深装置增加工作深度,直到最大工作深度。
定深装置将机构联动与电路控制结合起来。浮标入水时,控制电路根据设置的工作深度,将电压加载到对应档位电热丝上,使电热丝迅速升温,炽热的电阻丝熔断缠绕的拉力绳,触发机构联动,完成一系列定深动作。
3.6 阻尼装置及电缆线包
阻尼装置一般由螺旋线、弹性绳及阻尼盘构成。如图5所示,在线包和传输电缆上预先设置档位抽头,每档抽头系牢在定深装置对应档位上。传输电缆能够绕制成线包传输信号,同时承受一定的拉力,用于悬挂水下声学组件。弹性绳用于减振,缓冲水面漂浮组件在海面起伏时向下传递的冲击力。阻尼盘用柔性材料制作,能够折叠成较小直径,用于隔断冲击力对水下声学组件的影响。螺旋电缆缠绕在弹性绳外面,能够随弹性绳一起拉伸和收缩,起到减振作用。
图5 线包及阻尼装置
3.7 水下电子仓
水下电子仓设计成能够承受静水压力的密封舱体,用于容纳信号处理电路、电源管理电路、发射电路、锂电池组等电子模块。水下电子仓的长度由电子模块占据空间而定,根据圆柱形耐压壳体的理论知识[5],首先需确定水下电子仓壳体是长圆柱壳体、短圆柱壳体或刚性圆柱壳体,再结合破坏形式,进行临界压力校核。
由于锂电池具有体积小、重量轻、价格低等优势,最新研制浮标大多采用锂电池组供电。锂电池组封装在水下电子仓内,如果使用过程中单节锂电池产生气体泄露到密封舱体内,舱体内气体压力增大到耐压极限时,舱体会发生形变,甚至爆裂。因此,有必要在水下电子仓上设计一个泄气阀,对密封舱体及时泄压。一次性锂电池出现爆炸或起火多发生在放电过程,有效控制锂电池的放电时间,可以降低锂电池的危害概率,因此,有必要在水下电子仓上设计一个压力开关,控制锂电池的开启时间。
3.8 换能器基元阵形
浮标换能器的基阵形状主要有单基元换能器、多基元垂线阵、多基元平面阵和矢量探头。对于多基元垂线阵,各基元之间通过软绳进行连接。收拢状态下,叠放在换能器筒内;入水展开状态下,依靠各基元自身重力下沉形成预设阵形。对于多基元平面阵,各基元均匀分布在圆周等角度的五个辐射轴线上,每个轴线为 1根子阵,基元间通过多芯编织电缆连接在一起。非漂浮状态时,子阵收拢在扩展臂的外侧;漂浮状态时,通过可靠的扩展机构将子阵展开成平面形状,保持稳定阵形直到浮标结束漂浮状态。矢量探头包括全向水听器和矢量水听器,其中矢量水听器与磁罗盘固定连接并安装在壳体内部,全向水听器安装壳体底部,组成耐压密封舱体。
3.9 外壳组件
外壳组件主要由外壳筒、外壳底座和缓冲垫组成。外壳筒采用薄壁轻质合金,经特殊加工工艺成型,外壳筒顶部对接减速降落机构,底部与外壳底座采用钣金折弯连接。外壳筒满足使用时的加速度、冲击、振动等力学要求,满足投放时的接口要求。外壳底座采用高强度铸造合金,可以直接承受海水冲击。缓冲垫采用高弹性材料,用于减小底部冲击对内部零部件的影响。
4 结论
浮标结构设计时,可以根据需要实现的功能,选择相应的功能模块,进行合理布局。针对选用的功能模块,可以依照提出的技术途径进行详细核算。结构设计过程中,充分考虑浮标重心、浮心、转动惯量、重量等参数,使浮标适应投放状态和漂浮状态两个工作阶段。
猜你喜欢
计算机工程与应用(2023年1期)2023-01-13
天津师范大学学报(自然科学版)(2022年4期)2022-10-15
兵工学报(2021年4期)2021-06-19
航天返回与遥感(2020年3期)2020-07-09
科学导报(2018年30期)2018-05-14
小溪流(画刊)(2017年11期)2018-01-09
北京航空航天大学学报(2017年10期)2017-04-20
创新作文(1-2年级)(2016年12期)2016-12-26
中国测试(2015年11期)2015-12-17
高中生·青春励志(2014年11期)2014-11-25