机械基础学习中的疑难点剖析
2020-10-16 09:52屈新伟
机械管理开发 2020年10期
屈新伟
(河南省郑州市登封市中等专业学校, 河南 郑州 452470)
引言
机械基础作为机电与机制专业的专业基础课,是学习机械原理等后续课程的基础,对机械基础课中疑难点的透彻理解,会对后续课程的学习起到事半功倍的效果,由此特对机械基础学习中的疑难点剖析如下。
1 受力分析、受力图的基本概念与基本步骤
1.1 受力分析、受力图的概念
受力分析是指研究某个研究对象受到的力,并分析这些力对研究对象的作用情况,即研究各个力的作用位置、大小和方向。为了清晰地表示研究对象受力情况,需把研究对象从周围物体中单独取出,并画出研究对象所受其他物体的全部作用力,这种表示研究对象受力的简明图形,称为受力分析图。
1.2 画受力分析图的简明步骤
步骤一:选取研究对象。可以选取整个系统或系统中的某一构件作为研究对象。
步骤二:画出研究对象所受的全部作用力。包括主动力和约束反力。主动力为重力、风力、拉力;约束反力为研究对象受其他接触物体的作用力,根据接触形式不同,可分光滑接触表面的约束、柔性约束、光滑铰链约束、固定端约束四种类型,依据四种类型初步画出全部约束反力。
步骤三:分析系统中是否存在二力杆和三力汇交情况,如存在可简化或减少约束反力。
步骤四:分析受力图中全部力所属的力系类型,确定所建立方程的数目。
1.3 平衡方程的建立
汇交力系:建立(2 个方程)X,Y 方向上两个方程。
平行力系:建立(2 个方程)一个X 或Y 方向上的平衡方程和一个力矩方程。
任意力系:建立(3 个方程)X,Y 方向上的平衡方程和一个力矩方程。
建立平衡方程的简明步骤[1-2]:
步骤一:斜力的分解。将即不平行于X 轴,又不平行于Y 轴的任意方向上的斜力分解为X,Y 方向上的两个分力。
步骤二:X 方向上平衡方程的建立。将全部平行于X 轴的作用力分为沿X 轴正向与沿X 轴反向两种,沿X 轴正向的力全部相加放在方程的一边,沿X轴反向的力全部相加放在方程的另一边,即得X 方向上的平衡方程。
步骤三:Y 方向上平衡方程的建立(与X 方向同理)。将全部平行于Y 轴的作用力分为沿Y 轴正向与沿Y 轴反向两种,沿Y 轴正向的力全部相加放在方程的一边,沿Y 轴反向的力全部相加放在方程的另一边,即得Y 轴方向上的平衡方程。
步骤四:力矩方程的建立。
1)矩心的选取原则:取图中已知的特殊位置点且有尽可能多的未知力通过该点。
2)以矩心为转动中心,依次观察每一个作用力单独对研究对象的作用效果,使其绕矩心作顺或逆时针方向转动。
3)作用效果为顺时针方向转动的力矩相加放在方程的一边,作用效果为逆时针方向转动的力矩相加放在方程的另一边。
2 铰链四杆机构类型的判定
已知铰链四杆机构中组成四杆的长度,判定该机构的类型,因这些不是实物操作,从图中观察不出哪个杆能作整周回转,哪个杆只能左右摆动,但只要能综合地运用铰链四杆机构的基本知识,这些判定还是容易处理,总结出如下判定方法[3-4]:
1)看最长杆与最短杆之和是否大于其余两杆之和。大于则该机构为双摇杆机构,否则进行下面第2步判定。
2)最长杆与最短杆长度之和不大于(小于或等于)其余两杆之和时,有三种情况:若最短杆为机架,则该机构为双曲柄机构;若最短杆的邻杆为机架,则该机构为曲柄摇杆机构;若最短杆的对杆为机架,则该机构为双摇杆机构。
上述判定方法的掌握,不仅能顺利判定铰链四杆机构的类型,还可依据此判定方法进行逆推,从而可推导出各种类型的铰链四杆机构的组成条件,以及曲柄存在的条件。
3 螺旋传动中运动件移动方向的判定
螺旋传动利用的是螺旋副来传递运动和动力的传动装置。它可方便地实现从回转运动到往复直线运动的转变。如车床的大拖板,借助长螺杆与开合螺母的啮合,实现其直线往复运动。铣床工作台中螺杆的转动,带动工作台上下直线移动等。在教材中给出的判定法有其隐形限制条件,即教材中给出的左、右手法则,仅适用于螺旋副中一件运动的情况为螺母或螺杆既移动又转动,另一件不作运动;不适用于螺母和螺杆都运动的情况,即螺杆与螺母一个作转动,另一个作移动。
综上所述,在螺旋传动中判定运动件的移动方向可通过以下方法进行[5]:
1)判定螺母或螺杆的旋转方向(左旋或右旋)。
2)右旋伸右手(左旋伸左手),半握拳,四指顺着螺母或螺杆的旋转方向(也可将手掌按在螺杆的箭头上,四指与箭头指向一致)。
3)判定是一动还是两动(判定螺旋副中是一件既移动又转动还是两件同时运动)。
4)看大拇指的指向,一动同,两动反。(一件运动时,移动方向与大拇指的指向相同;两件运动时,移动方向与大拇指的指向相反)
4 蜗轮蜗杆传动中有关转向或旋向判定
4.1 蜗轮旋转方向的判定
在蜗轮蜗杆传动中,当蜗杆为右旋时,用右手(蜗杆为左旋时,用左手),半握拳,四指顺着蜗杆旋转方向,大拇指指的反方向为靠近蜗杆的半边蜗轮的旋转方向。如图1 所示。
如图2 所示实例,当蜗杆转动时,蜗轮作顺时针旋转,靠近蜗杆的半边蜗轮的旋转方向与大拇指的指向相反。
图3 中,蜗轮可见部分应向下转动(此图蜗杆在蜗轮的里边)。
4.2 蜗杆旋转方向或螺旋旋向的判定
方法同上,蜗杆旋转方向或螺旋旋向也可顺利地进行判定,

图1 判定蜗轮旋转方向
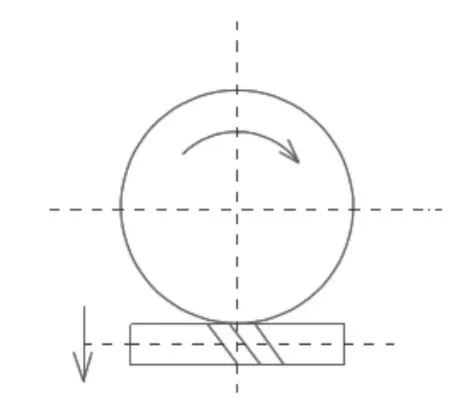
图2 判定蜗轮旋转方向
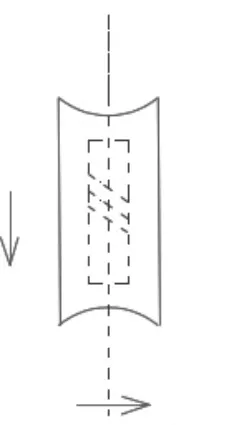
图3 判定蜗轮旋转方向
图4-1 为左旋蜗杆,伸出左手半握蜗杆,正握时(掌心向前),蜗轮旋转方向与大拇指指向相同,反握时(掌心向后),蜗轮旋转方向与大拇指指向相反,图4-1 蜗杆的旋转箭头应向右。同理,图4-2 中,右手握,指向相同,左手握,指向相反,所以图4-2 中蜗杆的螺旋方向为左旋。
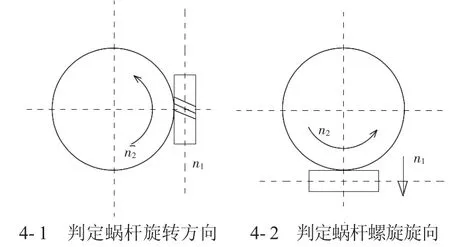
图4 判定蜗杆旋转方向或螺旋旋向
5 结语
掌握以上实例剖析的要点,相信以后在处理这些方面的疑难点时能够做到既快又准,并能从中得到启示:学习应积极思维、融会要点,从而达到准确运用知识的目的。
猜你喜欢
南方农机(2022年10期)2022-05-14
汽车工艺师(2021年7期)2021-07-30
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15
装备制造技术(2020年4期)2020-12-25
设备管理与维修(2020年20期)2020-11-17
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
中国特种设备安全(2019年8期)2019-10-14
发明与创新·小学生(2019年8期)2019-08-27
天津化工(2019年2期)2019-04-09