某型通信基站天线伺服控制系统设计∗
2020-10-10 02:44
舰船电子工程 2020年8期
(91404部队 秦皇岛 066200)
1 引言
某型通信基站在工作过程中需要天线具有方位转动功能,但是由于长时间处于海边高湿高盐雾的工作环境下,伺服控制系统偶尔发生故障而停止运转,造成不能保障任务的顺利进行。为此,本文天线伺服系统设计手动驱动和电动驱动两种可切换驱动方式。电动驱动部分以交流伺服电机作为驱动[1~3],带动齿轮传动实现方位轴的旋转,减速器输出端带有离合器来控制传动的开合。手动驱动部分以手轮作为驱动,蜗轮蜗杆减速器传递两交错轴之间的运动,带动齿轮传动实现方位轴的旋转。方位转轴系统利用控制器接收操作人员发送的转动命令,或由主控系统发送的目标跟随命令,自动控制转轴伺服驱动系统驱动转轴并带动其所承载的天线设备发生相应转动运动[4~5]。
2 通信基站天线结构设计
通信雷达天线设计成两种驱动方式,通过离合器控制传动的开合,保证其互不影响。设计选用CKS双向楔块超越离合器,实现传动的超越分离,主动轴转动时可带动从动轴转动,主动轴不动时,从动轴可以自由转动。
2.1 电动驱动结构设计
如图1所示重新设计了传动方式,并进行了电机、减速器、离合器、齿轮传动等的选型和计算,以交流伺服电动机作为驱动,通过交流伺服电动机—行星齿轮减速器—双向楔块超越离合器—齿轮—方位轴的传动方式,实现方位轴的双向转动。
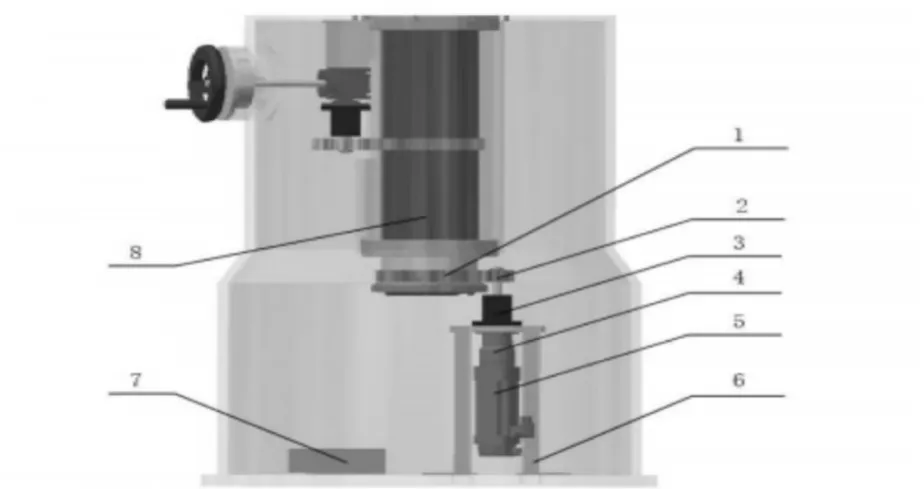
图1 电动驱动结构设计示意图
2.2 手动驱动结构设计
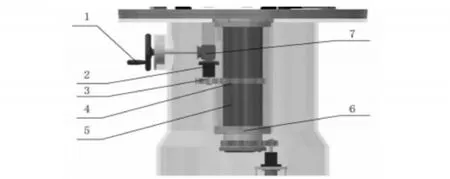
图2 手动驱动结构设计示意图
如图2所示,对于手轮驱动方式,重新进行了选型并设计了传动方式,以手轮作为驱动,通过手轮—蜗轮蜗杆减速器—双向楔块超越离合器—齿轮—方位轴的传动方式,实现方位轴的双向转动。
3 通信基站天线载荷分析与驱动元件选择
3.1 载荷分析
1)惯性载荷分析
系统转动部分的质量作用在方位轴的转动惯量为J方位,启动最大角加速度为方位ε方位max。
则惯性力矩为:M惯=J方位*ε方位max=4.0N*m 。
2)摩擦载荷分析
轴承的摩擦力矩的近似计算公式为

式中:Mf为轴承的摩擦力矩;μ为摩擦系数,0.01;G为接触的总重量,1962N;d为接触半径,0.5m。
代入公式可得:Mf=9.81N*m
3)载荷综合分析
综合上面载荷的分析,总的载荷等于惯性载荷、摩擦载荷以及重力载荷的总和。由于雷达天线实现的是回转的运动,载荷的影响表现为力矩形式,总载荷为

3.2 驱动元件选择
1)电动驱动元件选择

图3 跟踪方位力矩示意图
在通过理论分析计算的前提下,进一步采用Adams动力学分析软件仿真,图3为采用Adams动力学分析软件进行分析,首先以角加速度10o/s2运行2s,然后以指标要求的最大速度20o/s2运行8s得出的力矩曲线如图所示,从图中可得跟踪方位最大力矩4N·m。
因此,选用如下型号的交流伺服电机电机和减速器即可满足要求,电机和减速器模型如图4所示,交流伺服电机选用西门子交流祠服电机,伺服电机尾部自带测角元件分辨率为16384/转,型号为1FK7032-2A,额定功率300W,额定转矩1N·m,选用与之配套的二级行星齿轮减速器,型号为SP060S-MF2,减速比为 1:16,效率为 97%。
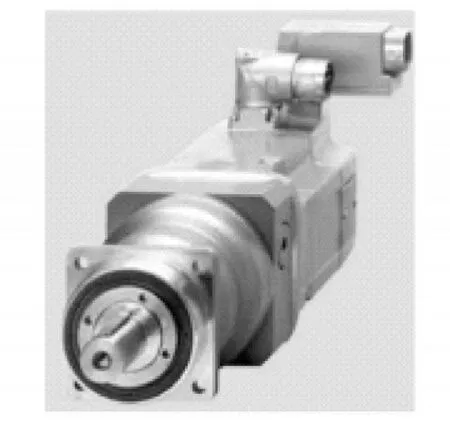
图4 电机和减速器
2)手动驱动元件选择
根据之前的计算,保证天线稳定工作所需要的最大转矩的情况下,手动部分主要工作过程为人力摇动手轮(如图5所示),带动蜗轮蜗杆减速器以及齿轮传动,实现方位轴的旋转。蜗轮蜗杆减速器型号为 NMRV030(如图6所示),减速比1:10,效率0.85;齿轮传动传动比为1:2.5,效率0.98。

图5 手轮
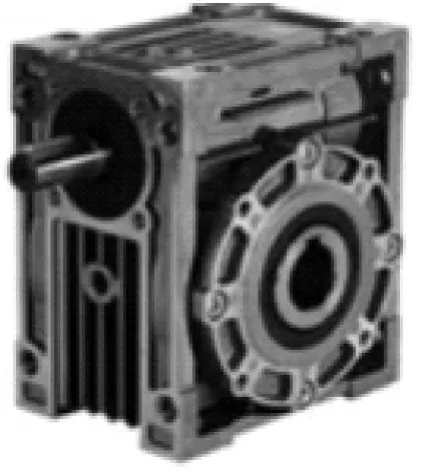
图6 蜗轮蜗杆减速器
4 通信基站天线伺服控制系统与人机交互系统设计
4.1 通信基站天线伺服控制系统设计
伺服控制系统分机原理如图7所示,主要包括电源管理系统、电磁兼容系统、伺服驱动+安全保障系统、感知系统、主控系统和人机交互系统等。
伺服驱动系统[6~13]主要由驱动器和伺服电机组成,驱动器选用双轴拖动的高性能伺服驱动单元,可以节省系统空间以及方便系统布线,且与多轴伺服控制器之间采用实时以太网总线EtherCAT通讯,其传输速度可达100M/s,有效地确保了向各个轴的指令下发以及状态反馈。同时驱动单元具备ETOP功能,在危及时刻可确保系统迅速停车制动,防止负载失控,提高了系统的安全性。

图7 伺服控制系统组成框图
4.2 通信基站天线软件系统工作设计
控制软件采用模块化设计思想,各模块之间尽可能的相对独立,以提高软件的可靠性和可维护性。控制软件的结构由两部分组成:上层的人机交互界面和底层的实时控制部分,上下层均使用Microsoft Visual C++2005开发而成。上层和底层是两个相对独立的进程,二者通过触发“事件”来进行通信,通过“共享内存”的方式进行数据交换,这样可以避免进程之间的相互干扰,提高系统的可靠性。控制软件的控制流程图如图8所示。

图8 控制流程图图
5 结语
本文针对某型通信基站天线偶尔发生故障而不能保障任务的问题,创新的设计了一种具有手动驱动和电动驱动可切换驱动方式。电动驱动部分以交流伺服电机作为驱动,带动齿轮传动实现方位轴的旋转,减速器输出端带有离合器来控制传动的开合。手动驱动部分以手轮作为驱动,蜗轮蜗杆减速器传递两交错轴之间的运动,带动齿轮传动实现方位轴的旋转。方位转轴系统利用控制器接收操作人员发送的转动命令,或由主控系统发送的目标跟随命令,自动控制转轴伺服驱动系统驱动转轴并带动其所承载的天线设备发生相应转动运动。为了验证设计方案的可行性,最终依据本文的设计思路,自主开发了雷达天线伺服控制系统,结果证明设计的合理性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年13期)2022-07-19
锻压装备与制造技术(2022年3期)2022-07-18
汽车零部件(2022年6期)2022-07-01
内燃机与配件(2022年2期)2022-01-17
智能制造(2021年4期)2021-11-04
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
小学生时代·大嘴英语(2015年7期)2015-11-23