
空空导弹网络化作战火控方式研究∗
2020-10-10 02:44:12
舰船电子工程 2020年8期
(海军航空大学 烟台 264000)
1 引言
随着导弹技术的不断发展,空空导弹作战半径不断增大,空中战场更加广阔,在信息化、网络化空战环境下,传统的单机发射/制导作战模式逐渐已经发展成为多个作战平台协作完成空空导弹的发射与制导。基于远程目指的多平台对空作战打击是网络中心战在空中作战的重要发展方向,通过前出平台提供(前出平台可以是预警机、地面指挥所、无人机和直升机等)所需目指信息,协助任务机完成火控解算和导弹中制导,扩展了载机作战区域,可实现高速、远程、精确打击敌方目标,提升综合作战能力[1~4]。
2 单机空空作战现有火控方式
根据武器种类、发射平台、导弹类型、打击目标和打击方式不同,可对火控方式加以分类,就空空导弹而言,可分为单机作战火控方式、协同作战火控方式等,或单目标攻击火控方式、多目标攻击火控方式等。空空导弹网络化空战的应用对象主要为中、远程空空导弹,为了分析单机空空拦截目标的火控方式,下面先给出空空拦截过程中机载雷达的工作方式以及中制导指令的形成方式[5]。
2.1 雷达和光电雷达协同工作方式
机载雷达截获目标是完成火控解算、导弹中制导的前提,目前,第四代战斗机一般装有雷达(脉冲多普勒雷达)和光电雷达,双雷达均可完成对目标的搜索和截获。为了提高目标发现概率,在空空拦截过程中,双雷达协同工作:以雷达优先发现目标为例,当雷达发现目标后,会将目标信息发送光电雷达,光电雷达根据此信息进行定向搜索,这样提高了光电雷达发现目标的概率;当雷达丢失目标后,若光电雷达处于跟踪状态,光电雷达会将目标信息发送给雷达,实现雷达的定向搜索,提高了雷达再次发现目标的概率,若光电雷达并未跟踪目标,双雷达均进入搜索状态。
2.2 空空导弹制导方式
在远距离拦射目标时,由于导弹射程较远,为了克服惯性导航带来的缺陷,提高目标截获精度,中、远程空空导弹在中制导段通常采用惯性导航加无线电指修令正复合制导,在末制导段采用主动雷达制导。在中制导阶段,载机按照一定的时间间隔,将修正指令(目标运动参数)发送给导弹;导弹自身运动数据由惯性导航设备得到;弹载计算机根据导弹和目标的相对运动参数计算出新的预计飞行轨迹,保证末制导雷达开机后,能够可靠截获目标[6]。
2.3 现有火控方式
当载机进入作战区域后,机载雷达开机,雷达和光电雷达会根据远程目指进行定向搜索,瞄准轴迅速对准指示的目标方位,可增大截获目标的概率;当雷达进入跟踪状态后,雷达将目标参数发送给任务机进行火控解算;当雷达丢失目标,任务机停止火控解算,若此时光电雷达处于跟踪状态,光电雷达将目标方位信息发送给任务机,雷达从任务机获取目标方位信息后进行定向搜索;若雷达和光电雷达均未跟踪目标,双雷达都进入搜索状态。所以一旦雷达脱离跟踪状态,任务机将无法解算。中制导阶段,雷达、光电雷达协同方式和火控解算阶段相同,并且只有雷达跟踪目标时,才能提供无线电修正指令[7]。
3 网络化作战火控方式研究
在现有火控方式下,远程指挥平台将作战飞机引导至作战空域后,将不再发送作战指令,由作战飞机单独执行任务[8],但机载雷达可能无法及时发现目标:一是作战飞机机载雷达探测性能的限制,只能感知战场局部态势信息,即使光电雷达远距离发现了目标,也只能提供角度信息,不能提供距离信息,无法完成火控解算;二是敌方作战平台机动、隐身能力不断增强;三是作战空域电磁环境日益复杂,载机抗干扰性能差[9]。针对上述问题,在现代网络化空战环境下,考虑到一些远程平台(如前出无人机、战斗机、预警机、指挥所)探测能力、抗干扰能力强的特点,作战飞机可通过数据链,利用这些平台提供的目指信息,实现火控方式。
为了便于分析比较,首先作如下假设:一是远程平台能稳定跟踪目标;二是远程目指数据满足任务机解算要求;三是平台之间拥有高性能的数据链。基于上述假设条件,以预警机为远程指挥平台为例,下面给出几种网络化作战条件下对空目标打击火控方式。
3.1 静默攻击火控方式[10]
在空空拦截过程中,当载机处于静默状态时,机载雷达不开机,或者雷达主瓣避免照射目标,以至于敌机难以发现载机,在这种状态下,载机可以先敌攻击。目标信息由网络中其他平台(预警机、无人机或者隐形战斗机)通过数据链发送给载机,载机利用远程目指完成火控解算、导弹发射和中制导。根据载机雷达的工作形势、载机是否作为中继站以及制导权是否交接,可将火控方式可以分为以下情况。
1)完全静默火控方式
完全静默火控方式如图1所示。状态是指在整个作战过程中,机载雷达是完全关闭的,不向外辐射能量,这样可以大大提高载机的隐蔽性。载机的火控解算数据由网络中其他平台通过数据链提供,当载机发送导弹之后,即可脱离战场,这种作战方式提高了载机的安全性和作战效率,在中制导阶段,远程平台通过数据链直接将无线电修正指令发送给导弹,形成新的制导指令控制导弹飞行。这种火控方式对弹载数据链、远程平台雷达探测性能要求较高。

图1 完全静默火控方式
2)相对静默火控方式
相对静默火控方式如图2所示。相对静默是指在整个空空拦截过程中,机载雷达处于辐射状态,但应避免雷达主瓣直接照射目标,和完全静默状态火控方式一样,载机利用远程平台提供的目标数据完成火控解算,在中制导过程中,远程平台仍然通过数据链将目标数据发送给载机,载机计算出修正指令后,通过雷达旁瓣发送给导弹。这种火控方式,导致载机隐身性能较差,但是导弹接受的修正指令由载机提供,不要求导弹装配数据链。
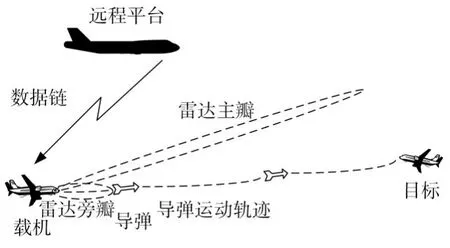
图2 相对静默状态火控方式
3)相对静默交接火控方式
相对静默状态交接制导火控方式如图3。在导弹发射前,载机根据远程平台发送的远程目指进行火控解算,然后将参数对导弹进行装订,并发射导弹,在中制导前段,载机利用雷达旁瓣给导弹发送修正指令,如图3(a);当载机因为某种原因需要停止制导时,载机将中制导权交接给远程平台,由远程平台继续完成导弹的中制导,同时载机可执行其他任务,如图3(b)。

图3 相对静默状态交接制导火控方式
3.2 非静默状态下交接火控方式
对于非静默状态下的交接火控方式是指,在整个作战过程中,雷达主瓣持续跟踪目标,当雷达丢失目标或需要完成其他任务,无法继续完成火控解算或者导弹中继制导,需要利用远程平台提供的数据完成后续作战任务。下文以中继制导过程为例,当载机不能供无线电修正指令,要脱离导弹中制导,通过移交中制导权,由远程平台对导弹实施导引。交接火控方式可以分为以下几种方式,这些方式的火控方式过程与相对静默状态交接制导火控方式类似。
1)载机作为中继站的交接火控方式
在非静默状态下,载机作为中继站的交接火控方式如图4所示。当导弹从载机发射后,进入中制导阶段,机载雷达波束主瓣持续照射目标,探测目标信息,并形成修正指令通过雷达波束旁瓣发送给导弹,如图4(a);当机载雷达丢失目标,中制导权进行交接时,远程平台先将远程目指发送给载机,然后载机将修正指令通过雷达旁瓣发送给导弹,如图4(b)。

图4 非静默状态中继站交接制导火控方式
2)载机不作为中继站的交接火控方式
在非静默状态下,载机不作为中继站的交接火控方式如图5所示。导弹发射之后,进入中制导阶段,机载雷达持续对目标进行照射、跟踪,并通过无线电修正通道将修正指令发送给导弹,如图5(a);当载机雷达丢失目标,中制导权进行交接时,预警机通过数据链,直接将无线电修正指令发送给导弹,完成导弹中制导如图5(b)。
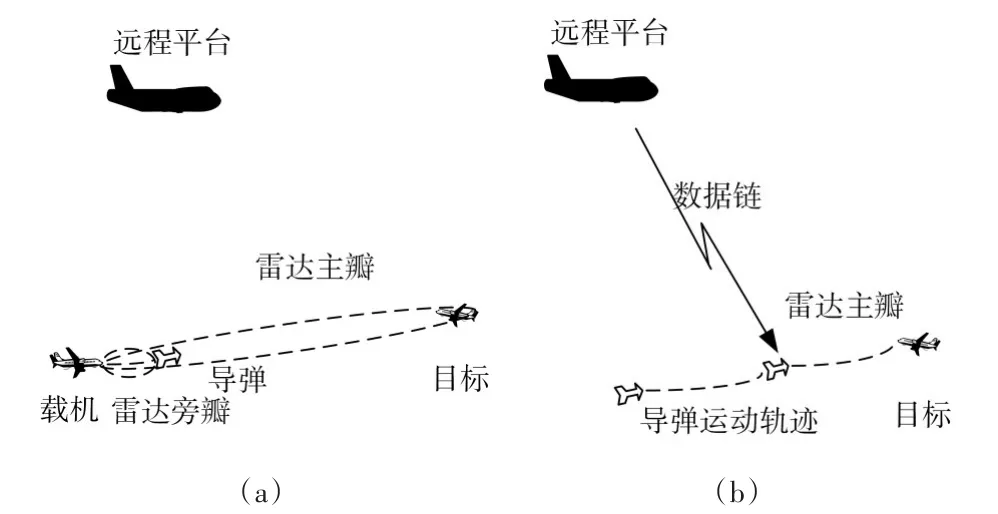
图5 无中继站交接制导火控方式
4 关键技术分析
对于空空导弹网络化作战火控方式而言,无论是静默攻击火控方式,还是非静默攻击火控方式,网络信息都需要在远程平台、载机和导弹之间转换,另外对于交接火控方式而言,在火控解算阶段,需要完成解算权的交接,在中制导阶段,存在着制导权交接的问题。为了提高数据精度,网络化作战火控方式应具有以下几点关键技术[11]:一是时间对准和惯导对准;二是传输延时补偿;三是基准坐标系的建立;四是信息坐标转换;五是弹载数据链;六是弹载卫星定位制导。
1)时间对准和惯导对准
由于网络作战涉及到远程平台、载机和导弹三个实体,信息在三者之间传输时,为提高数据精度,应该保证在相同的时间基准,从而提高火控解算精度和导弹中制导精度。一般载机和远程平台之间的时间对准通过卫星定位系统完成或者通过数据链完成,而载机和导弹之间的时间对准是在导弹准备过程中,通过数据总线完成。
在中制导过程中,导弹需要利用无线电修正指令和载机惯导系统测量的导弹运动参数计算出新的导弹制导指令,但是远程平台提供的目标数据精度往往比较低,会降低目标截获概率,所以可以提高导弹的定位精度,来降低远程目指对目标截获概率的影响,在载机发射导弹之前,完成导弹预热的同时,应该实现导弹和载机之间的惯导对准,特别是对于远距离拦截目标时,为了进一步提高惯性导航系统精度,应该完成导弹和载机平台之间的惯导精对准,惯导精对准需要较长时间。
2)传输延时补偿
无论是远程平台和载机之间通过数据链传输目标信息,还是载机和导弹之间通过雷达旁瓣传输无线电修正指令,都存在着时间延时,尤其是和远程平台之间的信息交互,所以为了提高数据精度,需要采用延时补偿技术。
3)坐标转换
远程平台、载机和导弹之间信息交互如图6所示,存在着以下几种情况:一是在中制导权交接时,载机需要将初始信息发送给远程平台;二是远程平台向载机提供远程目指,用于火控解算,或者是将载机作为中继站,先将无线电修正指令传送给载机;三是远程平台通过数据链将修正指令发送给导弹;四是载机通过雷达旁瓣将修正指令发送给导弹。上述几种情况,都需要将信息转换到相应的坐标系下,才能完成相应的任务。
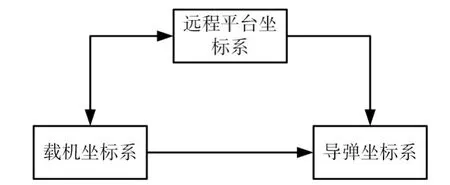
图6 平台间信息交互
4)基准坐标系的建立
在火控解算阶段或者在中制导阶段,远程平台、载机和导弹进行信息交互之前,需要通过数据链或者总线建立统一的基准坐标系,这样可以减少因坐标转换过多带来较多误差。
5)弹载数据链[12]
高性能弹载数据链技术可实现导弹和网络中其他平台信息共享,可以有效提高导弹接收到的无线电修正指令精度,减少数据传输延时,扩大导弹攻击范围,提高载机安全性。
6)弹载卫星定位制导
弹载卫星定位制导技术配合惯性导航系统制导时,可消除惯性系统因为时间累积带来的误差,也可以改善卫星定位自身无法实时获取信息的问题,二者相互配合,可提高导弹定位精度。
5 可行性分析
不同的网络化作战火控方式和现有火控方式的区别有所差异,存在以下几种情况:一是用于火控解算的目指信息可能由远程平台提供,而不是机载雷达;二是导弹中制导过程中,无线电修正指令(目标运动参数)可能由远程平台发送给导弹;三是机载雷达处于静默状态。网络化作战火控方式目前还存在以下不足:
1)武器装备改动大。一是要改动作战飞机机载雷达,机载雷达开机、搜索并锁定目标是火控解算、导弹发射的必要条件,而且在中制导过程中,无线电修正指令由机载雷达以直波信号的形式发送给导弹,这都与假设的雷达静默条件不符;二是要改动远程平台雷达,远程目指的数据率往往无法满足火控解算的需求,并且无法保证发送的无线电修正指令有足够高的能量,让弹上天线识别、接收;三是要建立远程平台与导弹之间的数据链通道,并且保证信道匹配,用于实现中制导。
2)作战职能改动大。若载机不作为中继站,远程平台不仅需要实现预警探测和指挥决策,还需要完成火控解算以及导弹制导,繁重的作战任务增大了平台上设备以及工作人员负担。
3)中继制导权交接对数据链要求过高。对于存在制导权交接的火控方式,导弹发射之后,导弹、载机和目标都处于高速运动中,在制导权交接时,载机应将先关初始信息(导弹位置、惯性坐标系等信息)发送给远程平台,同时远程平台应立即和导弹建立数据链通信,并且用于远程平台和导弹之间通讯的数据链必须能够适应复杂的电磁环境。
4)远程目指无法满足各方面需求。一是精度不够,目指信息是相对于远程平台本身测得的,数据本身存在较大误差,而且需要转换到相应坐标系下,才能完成火控解算和中制导,误差会进一步放大;二是实时性难以保证,远程目指的传输存在时间延时;三是数据率不够,远程平台提供的目指信息无法满足火控解算需求。
6 结语
空空导弹网络化作战的火控模式不仅解决了载机雷达无法及时发现目标的问题,而且通过使雷达处于静默状态,增强了载机的隐蔽性,并且可实现作战飞机“发射后不管”,虽然理想的火控方式目前在短时间内无法实现,但是随着武器装备技术的不断发展,本文的研究成果可以应用于未来的作战体系中。
猜你喜欢
青年文摘(彩版)(2023年3期)2023-11-27 08:49:39
科普童话·学霸日记(2023年9期)2023-08-21 17:27:14
英语世界(2023年6期)2023-06-30 06:28:40
航天电子对抗(2022年4期)2022-10-24 13:38:28
做人与处世(2022年2期)2022-05-26 22:34:53
南京航空航天大学学报(2022年2期)2022-04-27 01:45:38
艺术品鉴(2020年5期)2020-01-03 11:14:47
求学·理科版(2016年3期)2016-03-23 05:46:24
火控雷达技术(2016年2期)2016-02-06 02:29:04
故事家·星薇(2015年11期)2015-06-10 10:39:50
