基于移动平台的某型雷达模拟训练系统仿真研究∗
2020-10-10 02:44
舰船电子工程 2020年8期
(海军工程大学电子工程学院 武汉 430033)
1 引言
随着科技水平的不断进步,雷达装备日趋复杂,新一代相控阵雷达、微波超视距雷达等装备陆续投入使用,但是目前在雷达职手的训练方面还存在较多问题,例如仅仅依靠实装,效率低、代价高、器材不足、训练人数非常有限,而且雷达使用单位缺乏较先进的综合训练手段,特别是在复杂电磁环境的训练难题一直未得到很好的解决,为提高日常训练的针对性、有效性、协同直观性,训练态势往往采用大地坐标系以便更好地将多个目标的训练位置及运动过程在电子地图上显示出来。随着计算机技术和移动互联网技术的发展,模拟训练得到全新的变革和发展。
回波图像的显示与生成是雷达模拟器重要指标,国内外对雷达图像显示与生成的仿真研究较多,随着计算机技术和集成电路技术的发展,雷达模拟器的技术较之20世纪末有了极大的飞跃[1],目前雷达模拟器的设计技术日趋成熟,尤其是随着国内近年来在技术上的迅速发展,目前国内外在技术上已经没有太大的差别。徐景丽等采用数字信号处理技术,研究了雷达目标回波绘制速度[2]D'Amato等运用多边形求交的方法,生成回波的回波图像较好,且生成效率低[3];丛琳改进了岸海交界线回波生成方法,给出了不同潮汐状况下的雷达回波图像[4];全秋燕利用粒子系统生成了合理的雨雪杂波数学模型,建立了雨雪回波图像[5]。上述舰载雷达回波图像的研究均是基于电脑桌面平台,而基于移动平台的研究还不太普遍。
近年来移动设备的发展十分迅速,5G技术已经成熟,给雷达教学培训模式带来了创新快捷的方式。
与相比基于台式电脑的雷达模拟器相比,基于移动平台开发的雷达雷达模拟训练仿真系统具有体积小、操作方便、成本低等优点。本文以某型雷达为例,设计并实现了一个雷达仿真系统移动平台终端显示。主要目标是通过多种技术手段,解决某型雷达的目标、杂波、干扰、杂波抑制和抗干扰效果的仿真模拟难题,构建复杂环境条件下针对某型雷达的移动训练模拟平台,实现复杂电磁环境的模拟训练。
2 基于移动平台雷达模拟仿真系统的架构设计
本文的移动平台仿真设计基于Linux的开源移动操作系统,由应用程序层、应用程序的框架层、存储类库、Linux内核组成。本文以某型雷达的模拟训练系统为开发目标,构建了基于移动平台雷达模拟仿真系统的负责电磁环境下雷达训练的仿真。某型雷达训练模拟系统用户界面在设计的移动终端得到的显示画面如图1所示。
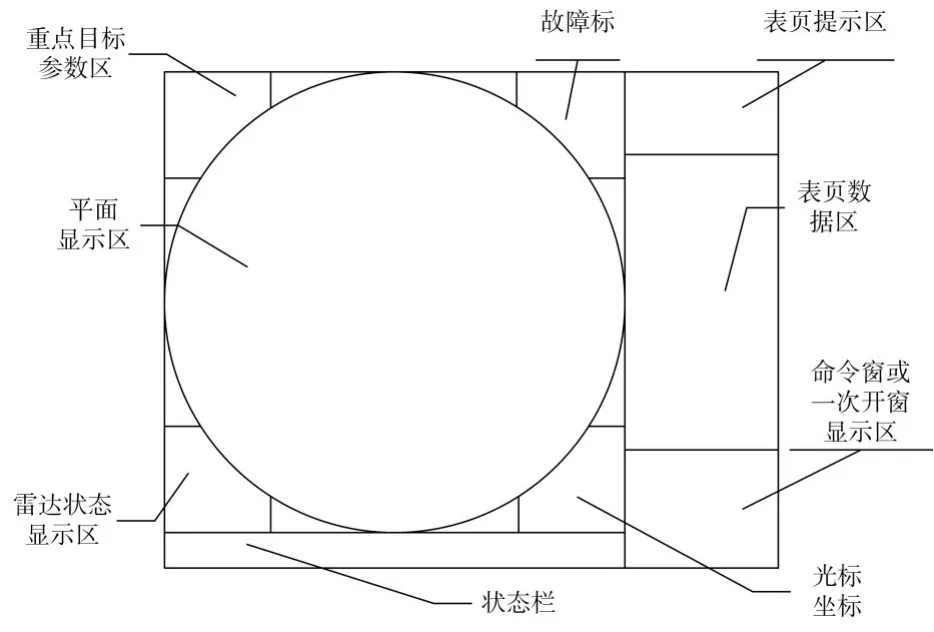
图1 仿真界面
目标、杂波的显示是显示移动平台通过软件在显示内存不同层面上作图形成的,每层采用8位控制图形显示的灰度强弱,目标、杂波的信号强度通过控制其显示灰度实现。
当进行目标显示时,显示平台根据模拟态势软件计算完成的目标强度数据,从中取得每批目标的位置、速度、强度数据,写入到显示内存对应地址处,完成目标显示。杂波显示方法同目标。目标、干扰、地物杂波、海杂波、气象杂波、箔条云、有源干扰分层显示,内存分配示意图如图2所示。软件流程图如图3所示。
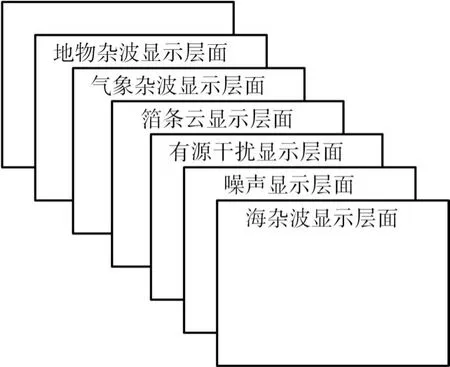
图2 雷达显示层面设计
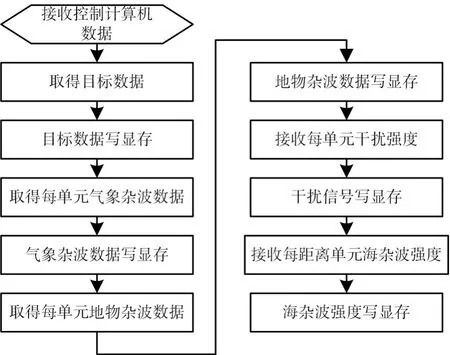
图3 显示软件流程
3 雷达模拟回波的仿真实现
3.1 目标运动数据的计算方法
当目标的运动轨迹确定后,目标自身的运动参数以及相对于雷达的运动参数需要及时解算并将结果存储到目标运动参数库中。目标与雷达的相对运动态势情况,目标自身的运动参数解算同上述雷达平台运动。如图4所示。
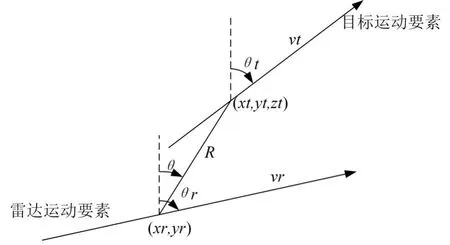
图4 目标与雷达的相对运动关系
目标在海面上的投影位置距离雷达平台的距离和方位分别为
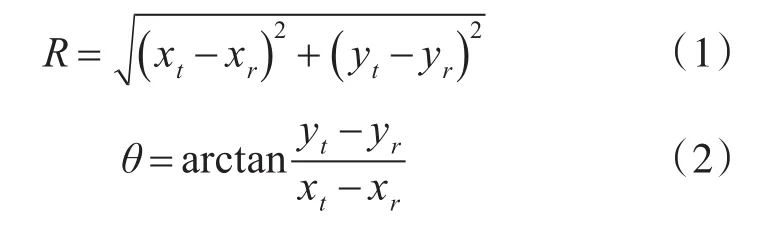
而相对雷达对目标的测量距离求解方法如图5所示(考虑到空中为标准大气,因此用等效地球半径代替真实地球半径,即re=8490km)。
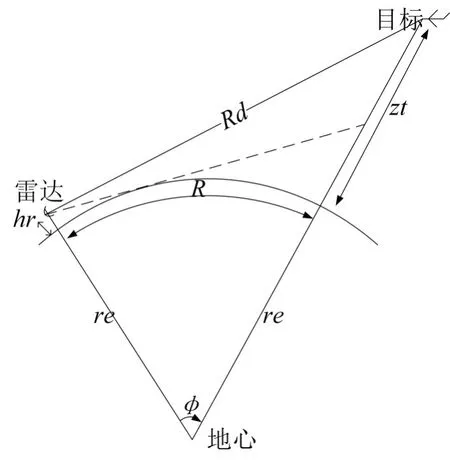
图5 空中目标与雷达平台的距离关系
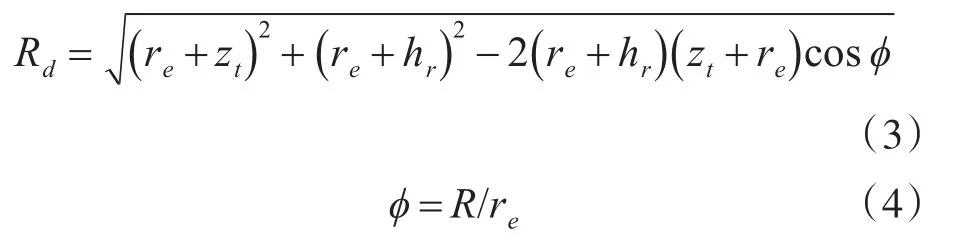
视距的计算公式如下:

上式中的Rv单位为km,天线和目标高度单位为m。为了减少计算量,只有当目标航行到Rd<Rv时,才需计算目标的回波信号到达雷达处的强度。目标相对于本船的径向速度为[6]

目标相对于雷达平台的相对运动方向为

3.2 地物目标运动要素的计算方法
由于本船是运动的,因此在每个时刻时,地物相对于雷达是按极坐标分辨单元进行回波强度计算的,雷达分辨单元的面积计算如下[7]:

运动参数采样间隔时间为:当雷达平台机动时,时间采样间隔为6s,当雷达平台做直线运动时,时间采样间隔为5min。
3.3 地物单元回波强度的计算方法
每个雷达分辨单元的回波信号强度[8]计算为
杂波信号注入点的信号功率应为

3.4 海杂波强度的计算方法
首先利用环境设定的风速,计算出雷达每个分辨单元的RCS,最后再计算出平均回波信号的大小。
通过风速可以计算平均波高[9]:
风速因子为:
计算粗糙度因子,其中ψ为波束擦地角[10]:

而风向因子和干涉因子为[11]
其中φ为雷达天线轴与逆风向间的夹角。最后可以计算出水平极化时的海面反射率:

得到了散射系数,就可以求出平均海杂波强度。仿真系统根据不同风速和风向条件下的海杂波强度形成海杂波数据。
3.5 气象杂波强度的计算方法
雨雪区域自身的运动速度和方向与风速和风向一致,每个分辨单元相对雷达的强度和径向运动速度的存储同地物杂波。但每个雷达方位单元、距离的RCS计算方法不同,具体如下。
雷达距离R处的分辨单元体积的计算[12]:

其中,θB、φB分别为天线波束的水平和俯仰半功率波束宽度。该分辨单元的RCS为

其中:

Z为雷达反射率因子[13],大小取决于降雨率或降雪率r(mm/h)。

注入到雷达中频接收模块的雨雪杂波信号强度为[14]

其中:
4 地海交界线图像的显示实现
因海图的地海交界线图像数据较多,不经过系统处理的雷达回波成像运行时间较长,本文对地海交界线图像数据进行了外形化处理。处理后外形既保持地海交界的外形特征和地物的复杂性特征,也减少了线要素的数据。Douglas-Peucker提出了一种简化成像数据点的算法,其研究方法是将外形轮廓曲线的首末点虚连成一条直线,然后设定一个距离阈值,再将计算得到的轮廓上所有点到连线的距离并找出最大距离值,最后再用最大值与设定的阈值比较,计算得到的最大值小于阈值,则舍去轮廓上所有的中间点;反之则保留最大值对应的点。以该点为界把曲线分为两部分,对这两段重复使用此方法,一直到没有更多的点被舍去停止,最后剩余的点即为所求,实现过程如图6所示。
图6 道格拉斯-普克算法
图7为某港海图,利用上述算法得到地海交界线雷达回波模拟图像如图8所示,地海交界线模拟的雷达回波与海图地形基本一致。

图7 某海港海图
5 一次回波余辉的实现
Direct3D绘制图形的颜色总是替换当前颜色缓冲区中存在的颜色值,即后渲染的图像总是覆盖在原有的位置上。该方法不能满足绘制类似于玻璃、水等具有透明效果的物体。Direct3D通过定义一个表示物体半透明度的Alpha值和一个半透明公式,可以把将要绘制的物体颜色与颜色缓冲区存在的颜色相混合,从而绘制出具有半透明效果的物体。Direct3D计算Alpha颜色混合的方法如下式[15]:

其中Color表示Alpha混合后的颜色值;RGBsrc表示源颜色值,即将要绘制的图元的颜色值,Ksrc表示源混合系数;RGBdst表示目标颜色值,即当前颜色缓冲区中的颜色值,Kdst表示目标混合系数。OP表示源计算结果与颜色缓冲区计算结果的混合方法,默认状态下为D3DBLEND_ADD,即源计算结果与颜色缓冲区结果相加。本文利用Direct3D的Alpha混合实现雷达的余辉效果。
图8 图像模拟
图9 Direct3D实现的余辉效果
传统的PPI雷达显示器依靠荧光物质的余辉效应将原始回波信号显示在雷达屏幕上供人们观察天线的扫描位置以及目标的运动状态,但是基于移动平台无法自动产生随机扫描中荧光粉的余辉效应,需要人为地模拟雷达扫描线的余辉显示。本文提出了一种利用改变同一颜色的不同透明度来表现的,颜色设置的越透明,颜色就越浅。通过使用这种显示模式,能够达到很好的逼真显示效果。图9是利用Direct3D实现的不同长度的余辉效果。
6 结语
针对雷达职手的训练存在的问题,本文设计并实现了一款基于某型雷达移动平台系统的模拟仿真训练系统。主要解决雷达使用单位缺乏较先进的综合训练手段,特别是在复杂电磁环境的训练难题一直未得到很好的解决的问题,根据复杂电磁环境仿真应用了道格拉斯-普克算法对地海交界线数据抽稀,建立了复杂电磁环境下的目标、地物杂波、海杂波、气象杂波的信号强度计算模型,实现了雷达回波图像在移动平台上的显示。采用分层叠加显示的方法实现了雷达系统仿真功能,实验结果表明,模拟训练系统在移动平台上仿真效果良好。
猜你喜欢
车主之友(2022年4期)2022-11-25
军民两用技术与产品(2022年5期)2022-06-28
成都信息工程大学学报(2022年2期)2022-06-14
舰船电子工程(2022年1期)2022-02-12
舰船电子对抗(2020年5期)2020-11-26
小学生导刊(高年级)(2016年11期)2016-11-14
少儿科学周刊·儿童版(2015年11期)2015-12-17
现代电子技术(2009年7期)2009-06-25
小哥白尼·军事科学画报(2009年4期)2009-05-11