共轴三反光学系统卧式装调技术
2020-09-29 03:21
应用光学 2020年5期
(北京空间机电研究所,北京 100094)
引言
光学系统计算机辅助装调技术是利用计算机测试技术通过相应手段调整系统中各个光学元件位置姿态,使光学系统满足焦距、视场等相关技术指标要求,最终获得清晰图像的过程。
目前,共轴三反式光学系统一般的装调思路是,先建立主镜-次镜系统测试一次像[1-2],调整主镜-次镜系统并使其达到一定的指标要求,然后调整三镜位姿使系统满足指标要求。这种装调方式较为明显的弊端有,一是主镜-次镜系统残留较大像差,从而导致测试精度降低,以该系统为例,一次像球差约为0.2λ(@632.8 nm),一般情况下,球差可通过补偿器或者相位平板[3]补偿,但对于同轴系统而言,一次像一般在主镜通光孔内,架设补偿器难度较大,可行性较差;二是由于三镜滞后调整,在其调整阶段一般以补偿像差为主,不能有效控制光学系统的视轴和后截距,造成系统焦平面倾斜,从而导致成像系统集成结构干涉;三是此方法分两步调整,装调效率较低。
本文以“高分一号”光学遥感卫星空间光学遥感器装调为例,介绍了一种新装调思路,即以主镜为基准,调整三镜位姿控制视轴,调整次镜位姿补偿像差,使系统失调量快速收敛,从而达到更好的成像效果。
1 光学系统公差分析及系统装调
1.1 光学系统介绍
“高分一号”卫星在轨图像如图1所示(迪拜棕榈岛拍摄)。“高分一号”卫星光学遥感器对地分辨率2 m,光学系统通光口径330 mm,焦距3300 mm,相对孔径1/10。其主镜、次镜、三镜均为二次非球面反射镜[4],与焦面折转平面镜组成共轴三反系统,如图2所示。主镜-次镜间距为344.784 mm;主镜-三镜间距为366.857 mm。为满足光学系统在轨成像要求,系统各个视场波前误差RMS 应优于1/15 λ,视轴偏差优于3′,次镜倾斜公差为3″,三镜倾斜公差为10″。
图1 高分一号卫星在轨图像Fig.1 Satellite on-orbit image
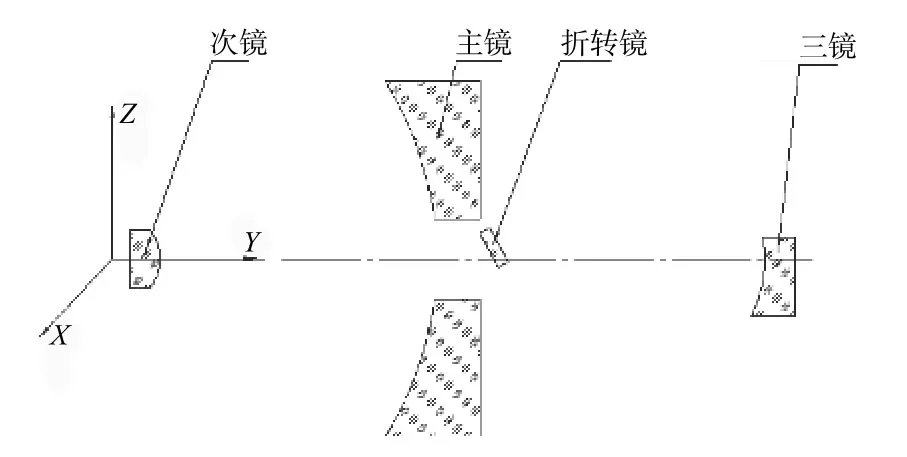
图2 反射镜调整坐标系Fig.2 Speculum adjustment coordinate system
系统装调以主镜光轴为基准。焦面折转镜直接影响焦面位置,所以首先调整焦面折转镜至理论位置,然后调整三镜的5个自由度,即三镜顶点与主镜顶点间距Ht、三镜沿X方向偏心量Dtx、三镜沿Z方向偏心量DtZ、三镜绕X轴旋转Rtx、三镜绕Z轴旋转RtZ;调整次镜的5个自由度,即次镜顶点与主镜顶点间距Hs、次镜沿X方向偏心量Dsx、次镜沿Z方向偏心量Dsz、次镜绕X轴旋转Rsx、次镜绕Z轴旋转Rsz,直至光学系统满足要求,结束系统调整。
1.2 公差分析
定义平行于主镜光轴的光束为轴上光线,即系统的中心视场,以线阵方向2个边缘视场分别为+1视场和−1视场。利用CODE V 软件计算次镜与三镜失调量对光学系统Zernike 系数变化关系,求得灵敏度矩阵如表1和表2所示。
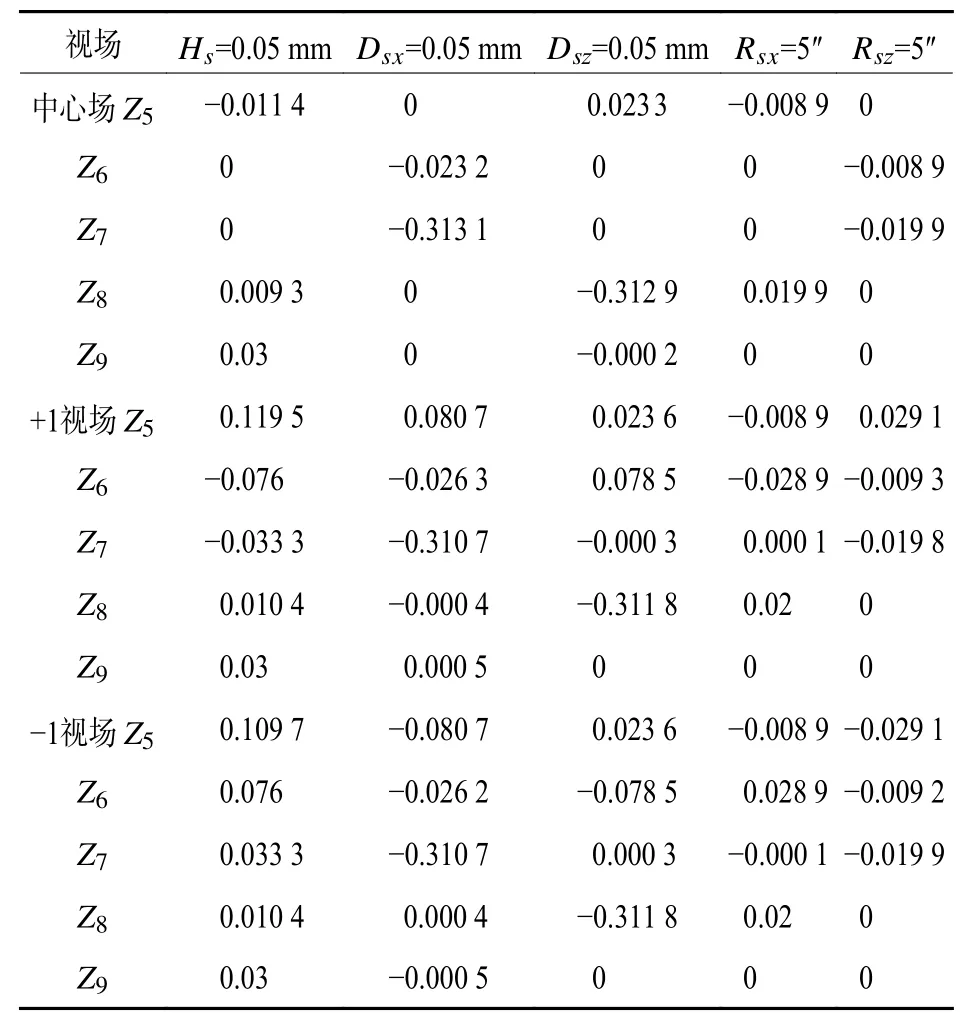
表1 次镜灵敏度矩阵Table1 Secondary mirror sensitivity matrix
1.3 建立基准
传统方法是以主镜机械机构作为光学装调的基准,不能满足成像系统的视轴偏差要求,以主镜光轴作为装调基准可有效避免光学加工引入的光轴偏差[5]。主镜是椭球面反射镜[6],非球面系数K=−0.961 8,接近于抛物镜[7]。将其置于大口径平面波光路中,此时平面波经过主镜反射后的汇聚点处有较大的球差,在汇聚光路中插入一定厚度的平板玻璃,用于补偿光路产生的球差,调整系统彗差至0,此时平行光方向即为主镜光轴,并将主镜光轴数据引至基准镜上,此方法测试精度优于1″。
1.4 焦面折转镜装调
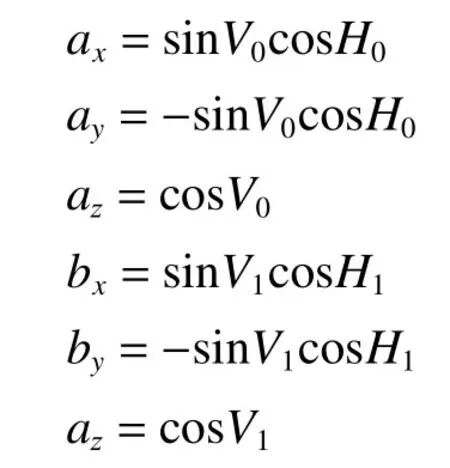
以主镜光轴为基准[8-9],使用光电经纬仪测试折转镜角度。设置经纬仪相对水平角度为0,记录经纬仪测试干涉仪平行光的读数V0、H0,其空间向量为a(ax,ay,az),测试经纬仪自准直[10]于折转镜的读数V1、H1,则折转镜的镜面法线空间向量为b(bx,by,bz),以经纬仪(0◦90◦)和(270◦90◦)分别为+X和+Y方向建立坐标系(同图2所示坐标系)。在经纬仪坐标系中a向量和b向量的分量可分别表示为
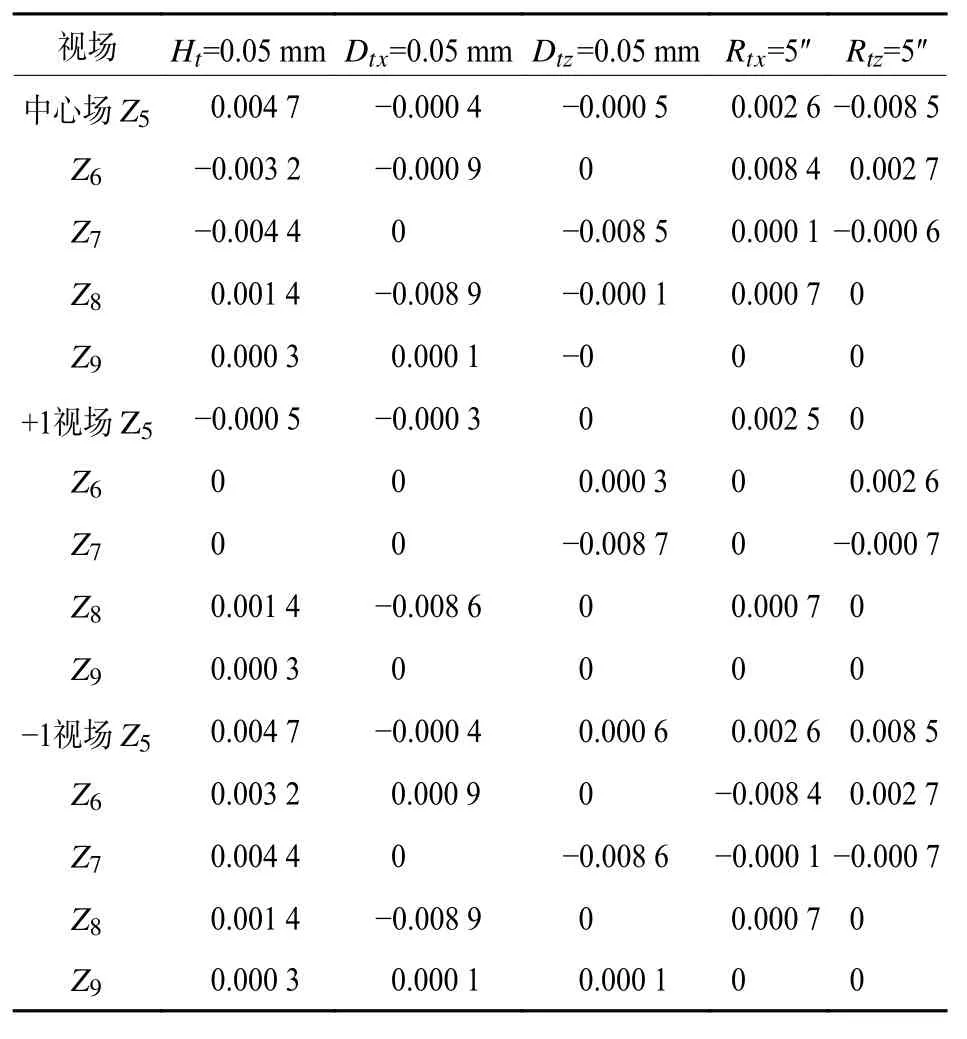
表2 三镜灵敏度矩阵Table2 Three-mirror sensitivity matrix
根据空间向量积公式:
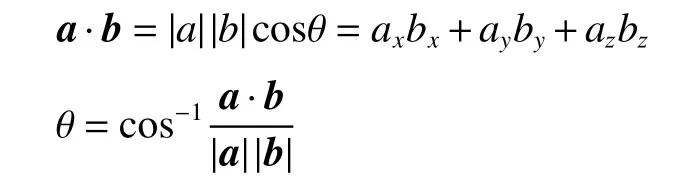
可求得2个向量夹角θ,调整折转镜调节垫片厚度,使得夹角θ满足要求。
1.5 失调量调整
以干涉检验法测试以波像差作为评价判据,即测量系统像质时,光学系统出射的含有光学系统光程差信息的光波面与参考波面发生干涉,可获得光学系统的波像差[11]。对于干涉测试法所得到的系统波前像差[12],可以由Zernike 多项式[13]来表示,如表3所示。光学系统采用卧式装调方式,搭建测试光路,如图3所示。使用大口径平面波干涉仪测试时,平行光波依次通过主镜、次镜、三镜、焦面折转镜后反射,汇聚到标准球面反射镜,使光波沿原路返回至干涉仪,形成干涉条纹。
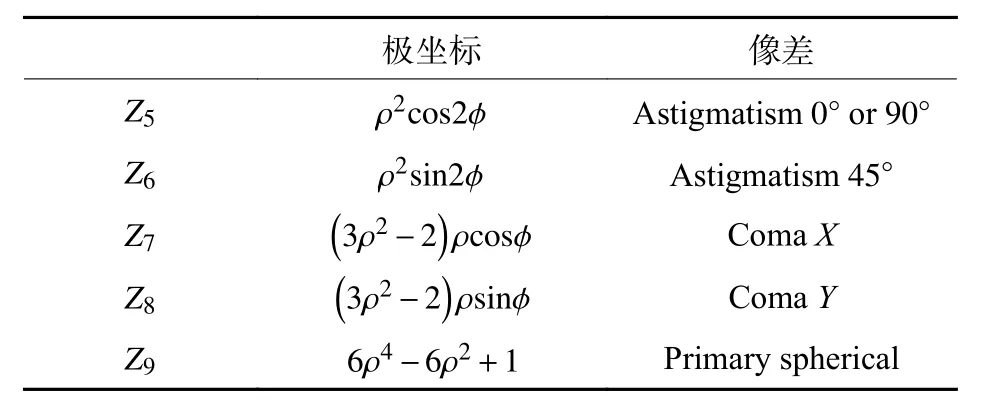
表3 Zernike 多项式Table3 Zernike polynomials
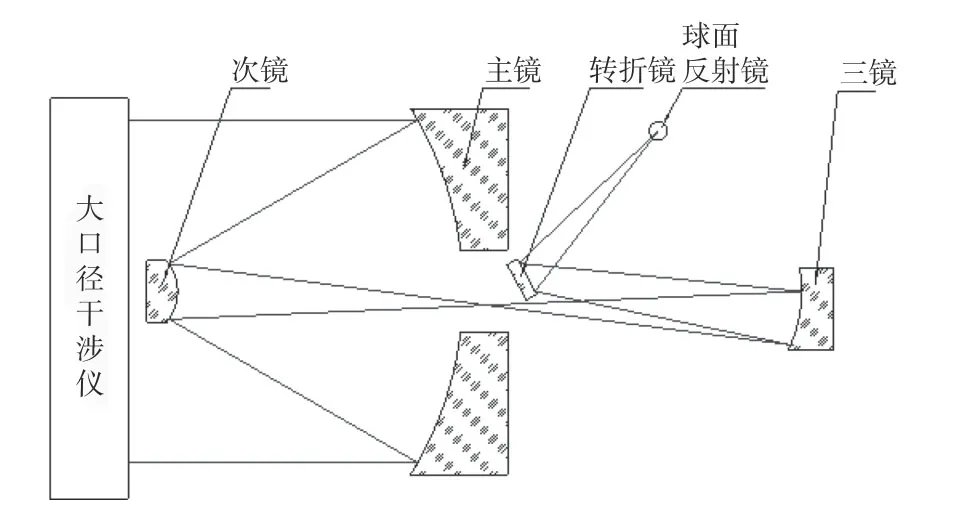
图3 光学系统装调测试光路Fig.3 Optical system alignment testing optical path
由三镜灵敏度矩阵和实践经验可知,三镜的位置姿态对系统的视轴指向及视场影响较大,对系统像差影响较小,所以首先调整三镜位姿确认光学系统中心视场。具体方法是,保持主镜光轴与干涉仪平行光方向一致,调整三镜沿Z方向偏心量DtZ及 三镜绕Z轴旋转RtZ,使平行光经过光学系统的像落在模拟CCD 器件中心像元[14]上,即系统的中心视场,如图4所示。
图4 模拟CCD 器件Fig.4 Simulation of CCD devices
根据测试中心视场成像质量结果,通过测试软件解析可得Z5、Z6、Z7、Z8、Z9。由次镜灵敏度矩阵可知主镜与次镜间距直接影响系统的像散、彗差和球差,且次镜的其他几个自由度[15]的调整不会影响系统的球差。因此,首先调整次镜与主镜距离Hs,直至中心视场球差小于1/30λ。次镜倾斜影响系统像散和彗差,调整次镜倾斜Rsx、Rsz,使系统
像散优于1/30λ。次镜偏心对系统彗差影响比较明显,调整次镜偏心Dsx、Dsz,直至系统彗差优于1/30λ。
再次调整三镜位置姿态以纠正次镜调整导致中心视场像点的位置偏差,随后调整次镜位置姿态补偿像差,测试轴外视场Zernike 系数,调整次镜使轴外视场像散和彗差收敛,直至各视场像质满足要求,这是一个多次迭代的过程。
2 装调结果
经过几轮迭代调整,光学系统各视场Zernike系数都调整到1/20λ 以内,如表4所示。由表4可知,中心视场RMS值为0.055λ,+1视场RMS值为0.056λ,−1视场RMS值为0.056λ,均满足设计要求。装调后光学系统各视场干涉图如图5所示。

表4 装调结果Table4 Alignment results
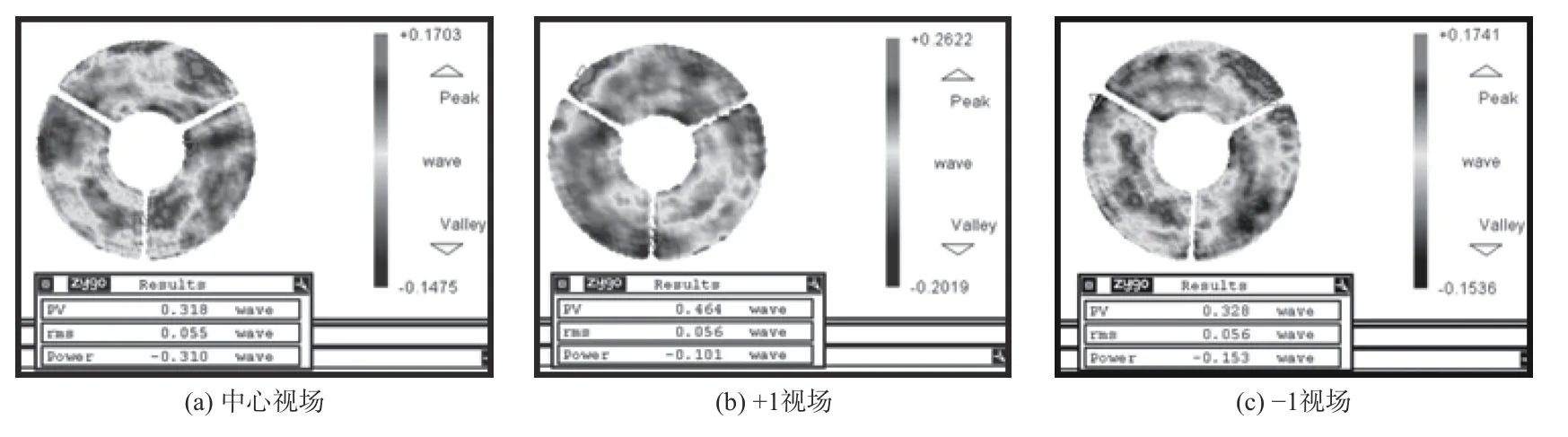
图5 光学系统各视场干涉图Fig.5 Interferogram of each field of view in optical system
3 ?结论
以“高分一号”遥感卫星高分辨率遥感相机装调过程为例,提出了一种共轴三反光学系统装调思路,以主镜光轴为装调基准,以三镜位姿控制系统视场和视轴,以次镜位姿控制系统像质,应用计算机辅助装调技术建立了次镜、三镜位置姿态与Zernike 系数的关系,缩短了装调周期,取得了较好的效果,相机在轨成像清晰,层次丰富,验证了装调工作的正确性。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
荆楚理工学院学报(2022年2期)2022-09-16
科学技术创新(2021年25期)2021-09-11
摄影之友(2020年12期)2020-12-23
中国医疗设备(2019年1期)2019-01-15
电脑爱好者(2018年17期)2018-11-05
中国光学(2017年4期)2017-08-01
航天返回与遥感(2011年6期)2011-10-11
兵工学报(2011年10期)2011-02-22
中国光学(2010年6期)2010-11-06