基于阵列光电侦察系统空间观测数据融合方法
2020-09-29 03:08赵俊成刘建平
应用光学 2020年5期
赵俊成,刘建平,袁 良
(1.西安应用光学研究所,陕西 西安 710065;2.北京理工大学 光电学院,北京 100081)
引言
目前光电侦察系统对于低空快速小目标的观测采取的主要方法是采用可见光、中长波红外焦平面探测器完成测角,配合激光测距,通过凝视与跟踪手段实现对巡飞弹、无人机等低空小目标的观测。采用这种方案存在以下主要问题:为了对小目标有足够的探测距离,光电探测器视场往往受限,不仅无法实现大范围的目标搜索,而且很难实现对多批目标的探测,同时也很难实现对全方位来袭目标群的搜索探测;另外,采用激光测距,对跟踪系统的测角精度要求非常高,类似无人机低空快速小目标,激光光束很难对准,在雾天,激光测距机的作用距离会进一步减小,很难达到15 km以上的测量距离,更重要的是,激光测距机无法实现对多目标的实时测距[1-6]。这些问题导致单站点光电侦察系统在实际应用中经常受限。同时,考虑到多传感器数据融合实现过程中,各传感器测量的实时数据都不可避免地带入测量环境产生的随机扰动,所以测量得到的数据必然带有不确定性,而多传感器数据融合技术可利用各传感器测量数据的冗余和互补信息有效提高数据的可用性。本文利用可远距离侦察及高精度跟踪的阵列式光电侦察系统组网方案,提出了阵列式光电侦察系统空间观测数据坐标转换与数据融合方法,将系统组网内单个侦察站观测数据合并处理,实现对空间被测目标的坐标定位与航迹生成。
1 阵列式光电侦察组网技术
目前,较为先进的阵列式光电侦察系统采用光电侦察系统组网技术、光电侦察系统综合控制技术等[7-13]。针对单台光电设备存在的缺陷,阵列式光电侦察系统将多台光电侦察设备以m×n阵列布站组网,前沿侦察站截获目标,目标信息通过无线传输至组网内其他站点,后续侦察站可对目标进行多点接力跟踪,有效前伸警戒线,扩大了防御范围,提高了系统可靠性,可实现早期预警,早期监控。
单观测系统以大地为基准,以观测站所在位置A点为中心建立三维直角坐标系,如图1所示。
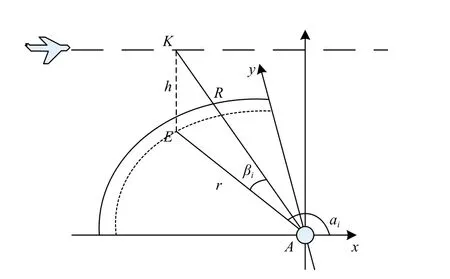
图1 单观测站侦察空域示意图Fig.1 Schematic of reconnaissance airspace for single reconnaissance station
假设目标沿着与x轴平行方向自左向右飞行,飞行高度为h,飞行方向与x轴的间距为d,目标飞行速度为v,侦察设备按顺时针方向扫描,侦察距离为R,扫描角速率为ω。光电侦察站可通过扫描观测到目标的方位角和俯仰角位置(αi,βi)等数据。
阵列侦察系统由多台侦察设备及中心站组成。图2为目标在2×2 侦察阵列中水平面上的投影,以A21点为中心建立平面直角坐标系,目标飞行参数同上,侦察站A11、A12、A21、A22均按顺时针方向扫描,扫描角速度均为ω。
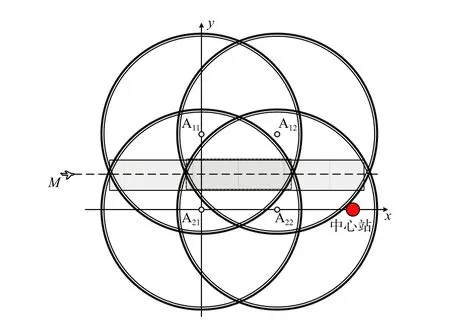
图2 目标进入侦察阵列俯视示意图Fig.2 Overlook schematic of target entering reconnaissance array
目标按照航路飞行进入侦察阵列,可以看作是目标分别进入侦察站A11、A12、A21、A22,分解为4个侦察站分别对目标进行处理,得到各侦察站探测到目标通过侦察区域时的角位置数据和时间数据,建立各站探测目标的数据库,侦察阵列中的侦察站将各自观测到目标的方位角、高低角、时间数据等信息实时传递给后方中心站,中心站经过坐标转换和数据融合等手段,实时建立目标航迹,同时给出预警信号及各侦查站对目标的指示信息。
2 侦察系统数据坐标转换方法
坐标转换模块是将各侦察站测量出的目标数据转换至统一的参考坐标系下(如大地坐标系),以便中心站进行目标航迹融合处理。
每台光电侦察设备都具有测角功能,将2个光电侦察站组合,分布在空间中不同的两点,通过算法推导即可实现在光电侦察站测量坐标系下对目标进行定位,输出距离量[14]。经过被动测距后的目标坐标均以各侦察站为中心的极坐标表示,包括中心站在内的各个侦察站采用的坐标系是各自独立的,因此必须将各站测得的目标极坐标转换到统一坐标系(地球坐标系或中心站坐标)中,以便进行数据融合处理。
各侦察站对目标测量值进行坐标转换时,先将各侦察站的目标测量值由极坐标转换为直角坐标,然后变换到地球坐标系中,再从地球坐标系变换到中心站直角坐标系,最后得到中心站的极坐标值,如图3所示。
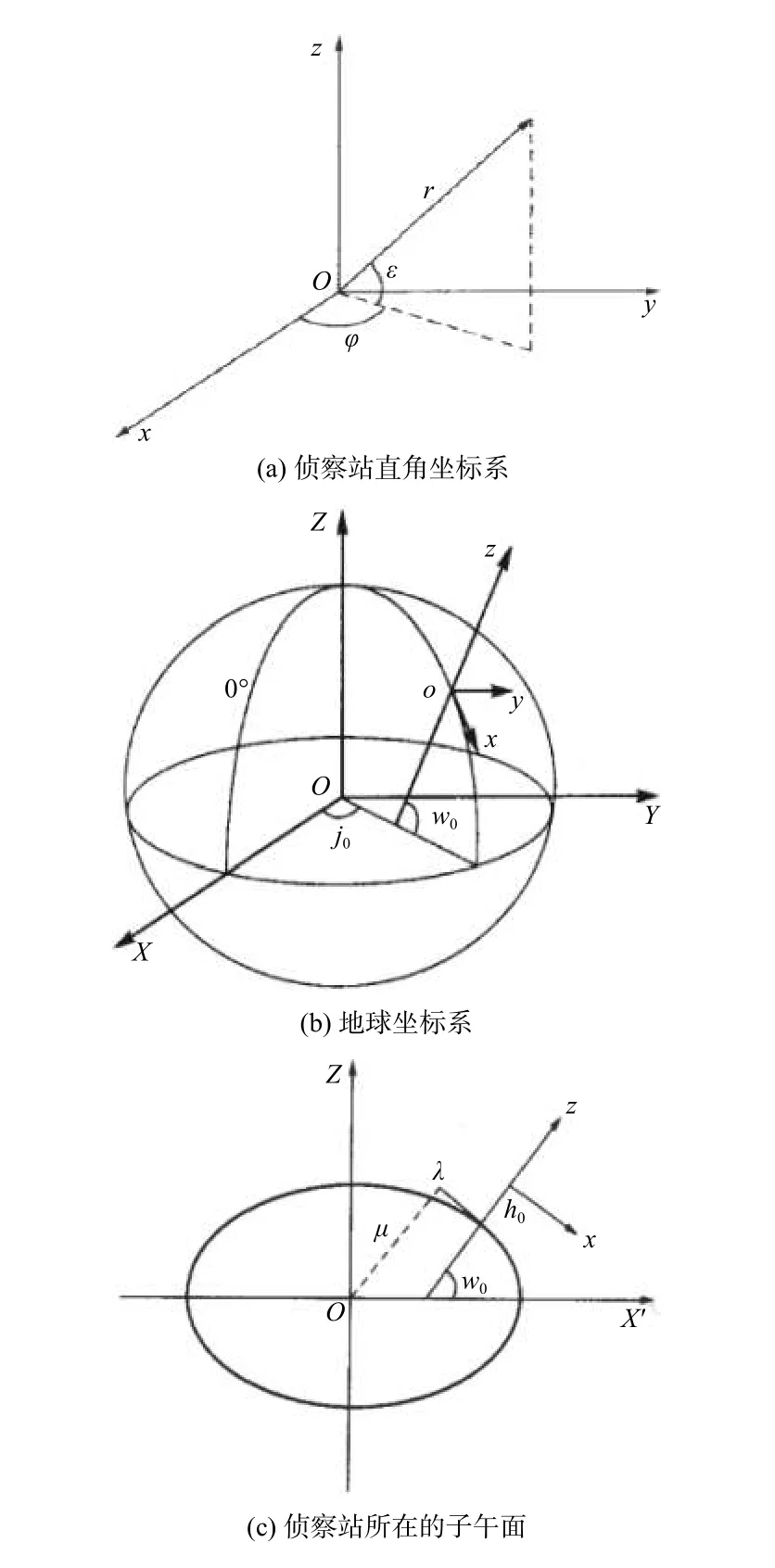
图3 坐标转换参考坐标系Fig.3 Coordinate transformation reference coordinate system
坐标转换具体步骤如下。
如图3(a)所示,将各侦察站极坐标变换成各站的直角坐标系:

如果侦察站是二维坐标,并且目标比较远,则可令ε=0 来近似。
将各侦察站的直角坐标系转换到地球坐标系,见图3(b)所示,转换关系为
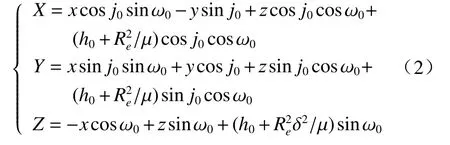
式中:j0、ω0分别为侦察站所处的地理经度和纬度;h0为侦察站海拔高度(m);Re为地球赤道半径,取值为6 378.14 km;δ为地球极半径与赤道半径之比,且δ2=0.993 305 458。

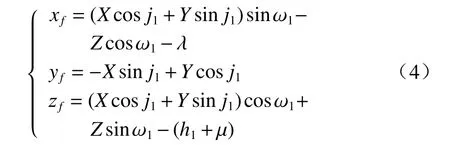
将地球坐标系变换到中心站直角坐标系。设中心站的地理经度、地理纬度和海拔高度分别为j1、w1、h1,则有:
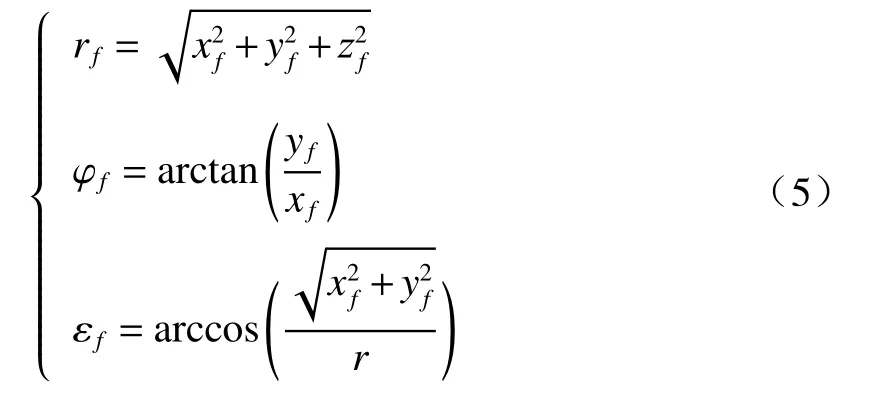
在中心站测量坐标系中的极坐标为
坐标转换的流程如图4所示。
3 侦察系统数据融合方法
从多传感器数据融合的角度看,在阵列式光电侦察系统中,各侦察站首先完成单传感器的角位置观测与状态估计,把获得的目标航迹信息输入融合节点,并在融合节点完成坐标转换、时间校正或者对准,然后基于这些侦察站的目标状态估计进行航迹互联(相关)处理,最后对来自同一目标的航迹估计进行航迹融合,从而实现目标航迹估计间的空间融合。
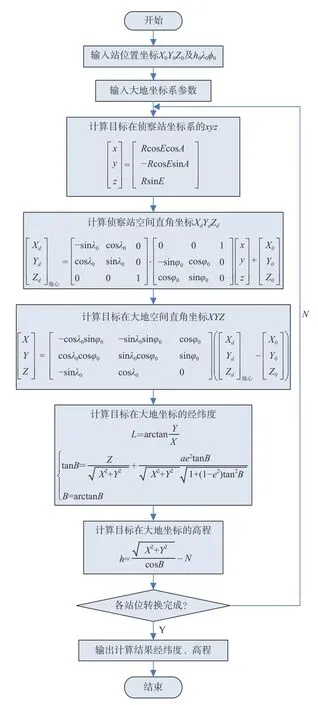
图4 侦察系统坐标转换流程图Fig.4 Flow chart of coordinate conversion for reconnaissance system
数据融合技术主要解决传感器测量值带有随机扰动的不确定性。目前主要的融合方法有:极大似然法、特征向量稳定理论、Bayes 估计、Fisher 信息、证据理论、最小二乘法、参数估计、神经网络、相对距离等[15-16]。上述方法虽然都有较多应用,但是它们均没有考虑到多传感器数据融合结果的抗干扰性。由于传感器受到本身性能和外界随机因素的影响,其测量值是不确定的,因此要求数据融合算法具有较好的稳定性。为了得到更精确、稳健的融合算法,同时满足数据传输和处理的实时性,我们采用自适应加权融合算法,利用最小一乘估计得到各传感器的权值。
假设有n个光电侦察站从不同的方位对目标特性参数进行测量,Xi表示第i个侦察站测得的数据。第i个侦察站的测量方程为

式中:X为被估参数的真值;Xi为测量值;ξi为测量噪声。设ξi≈N(0,),且ξi、ξj(i≠j)相互独立,是第i个侦察站的测量方差。
由于各光电侦察站的测量精度不可能完全一样,可信度也就不同。为使数据融合的效果更优,根据各个侦察站的测量值自适应地寻找其对应的权值,以达到最优的融合结果。自适应加权数据融合模型如图5所示。
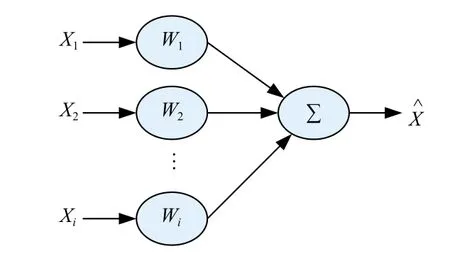
图5 自适应加权数据融合模型Fig.5 Adaptive weighted data fusion model
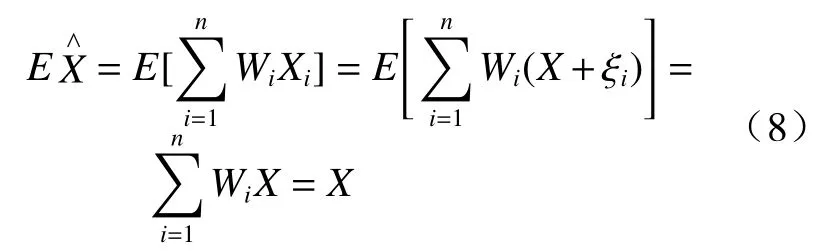
由图5可知,自适应加权数据融合的结果为

自适应加权融合算法最关键的是确定各传感器的权值Wi。从无偏性和稳定性2个方面来考虑,为保证融合结果是待估参数X的无偏估计,必有,由(6)式可得
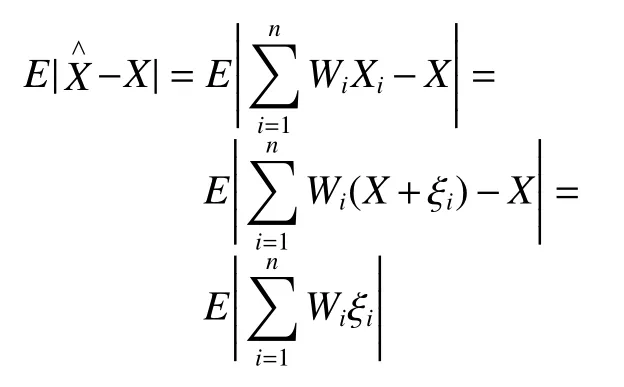
自适应加权融合的权值可以转化为求Wi,使绝对偏差最小,即:

式(9)的最优解,即各侦察站权值的最小一乘估计Wi可通过求解下列方程组得到:
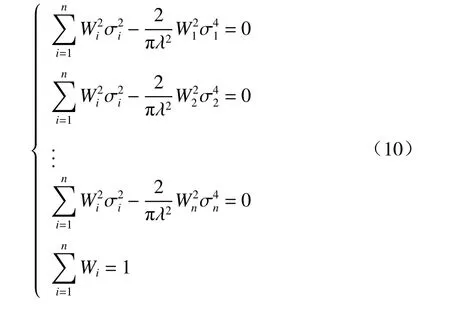
式中λ为拉格朗日乘子。在自适应加权融合算法中,各侦察站的权值Wi通过最小一乘法估计,由(10)式求出。由于(10)式是n元二次方程组,可通过迭代方法求解。
数据融合模块将多个光电侦察站给出的目标数据通过数据融合算法进行融合处理,可得到更可信、精度更高的目标数据,以便充分发挥阵列式光电侦察系统的优势。
4 实验结果与分析
为验证阵列侦察设备目标观测数据融合方法,在某机场搭建实验环境进行验证实验,受限于单元数(3台光电观测设备)和外场实验条件,使用3套光电设备与数据融合中心组网。实验过程中,外界环境(气候、温度等)的变化均会对光电观测设备的观测能力和观测数据准确性产生一定的影响,如雨雪天气、环境温度过高或过低都对光电观测设备的观测距离和数据准确性造成较大影响。在此条件下,观测数据融合技术可利用各传感器测量数据的冗余和互补信息在一定程度上提高数据的可用性,获得与被测目标较为一致的航迹信息。
实验中3套光电设备按照单行依次排列,即相当1×3 侦察阵列,如图6所示,各观测设备间距50 m。阵列内光电系统同时对飞机目标进行观测,观测数据发送到中心站进行坐标转换和数据融合处理。
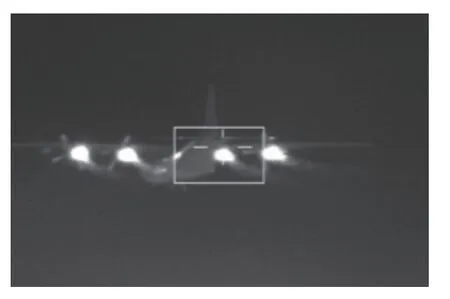
图6 验证实验视频截图Fig.6 Video capture of verification experiment
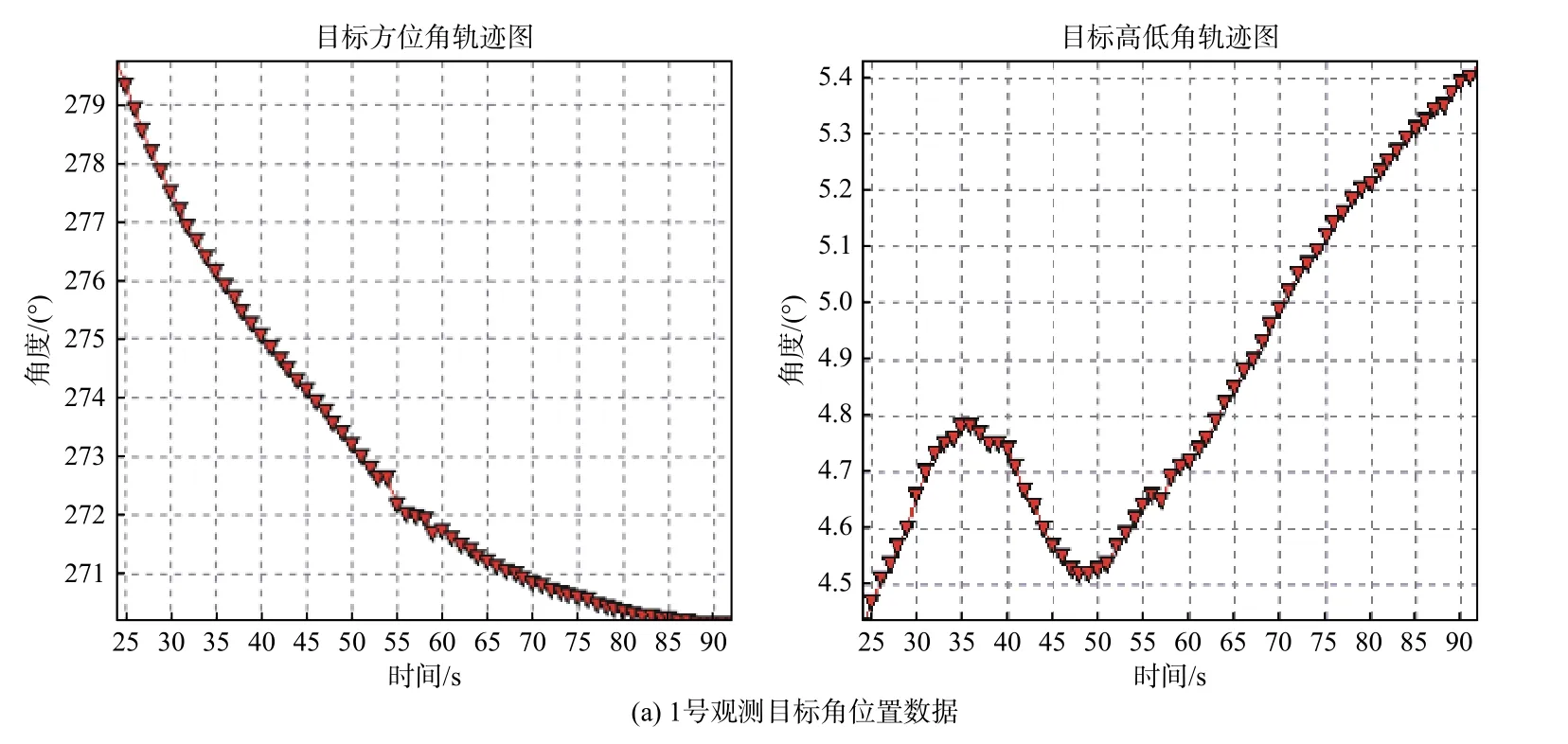
实验中,利用1×3 光电系统对飞机目标进行方位角、高低角观测,3台光电设备分别获取到了观测目标的实时数据信息,如图7所示,同时将此观测数据发送到中心站。
从图7可看出,由于观测站观测的飞机起飞阶段飞行距离(>10 km)相对侦察阵列布站间距(50 m)较大,各观测站得到的随时间变化的方位角和高低角趋势基本一致,通过相互对比计算验证了数据的可信度。根据各侦察站相对位置模型和侦察阵列对目标观测的角位置数据完成坐标转换,按照阵列侦察数据融合方法对转换后的数据进行
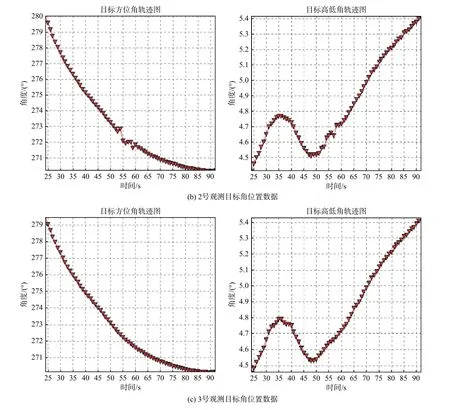
图7 3台光电设备对飞机的观测数据Fig.7 Observation data of aircraft by 3 photoelectric devices
融合处理,输出飞机起飞阶段三维航迹,图8为侦察阵列对目标的观测实验数据及目标航迹。
图8(b)和图8(d)为融合后被测目标的方位角和高低角轨迹图,其变化曲线均连续平滑,符合被测飞机起飞阶段的飞行运动规律。通过图8(a)三维航迹图和图8(c)坐标数据可以看出,中心站经过坐标转换处理后得到了连续的被测目标随时间变化的实时3 坐标空间位置信息,按照侦察系统数据融合方法,通过计算准确生成了飞机起飞段的三维航迹图,验证了本文数据融合方法的有效性。
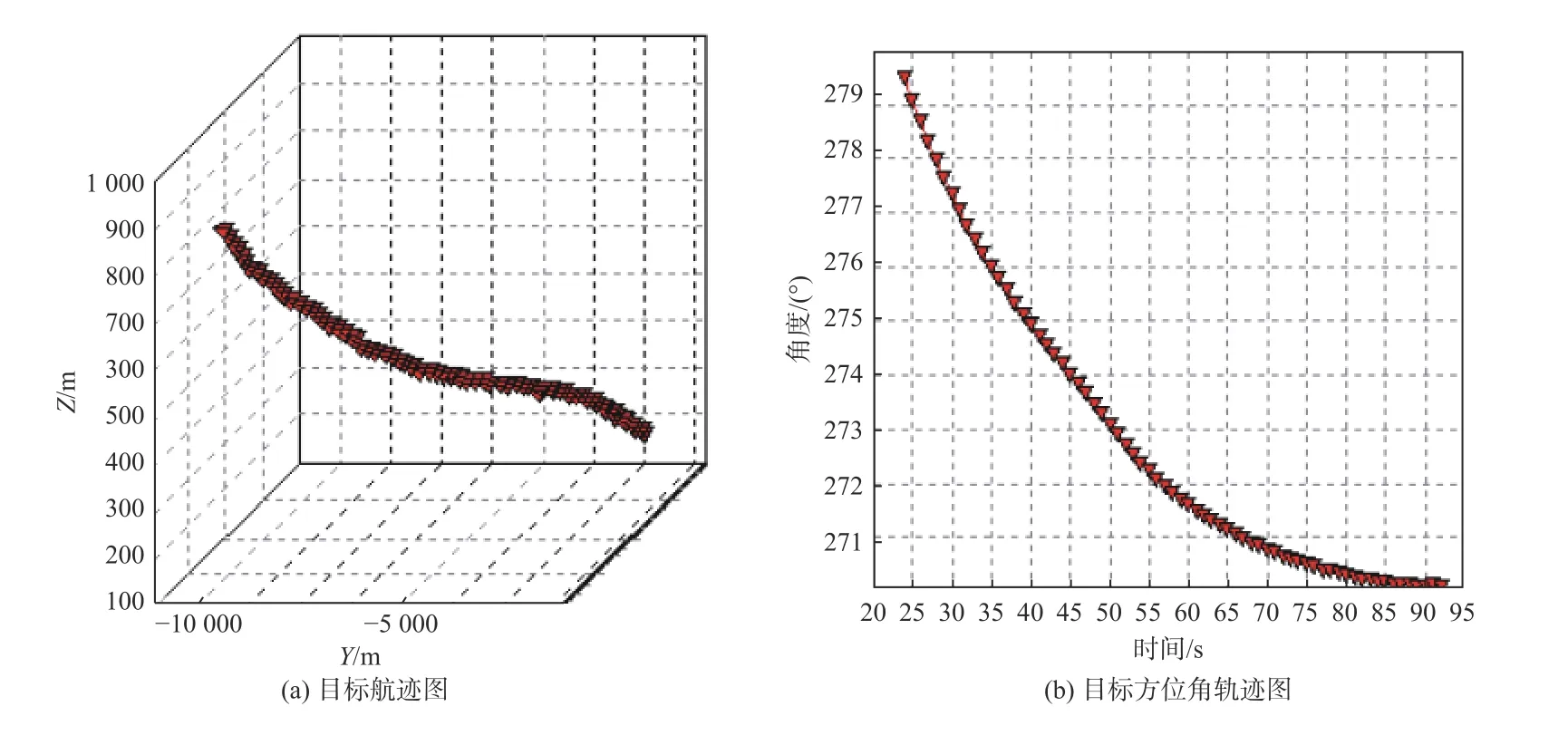
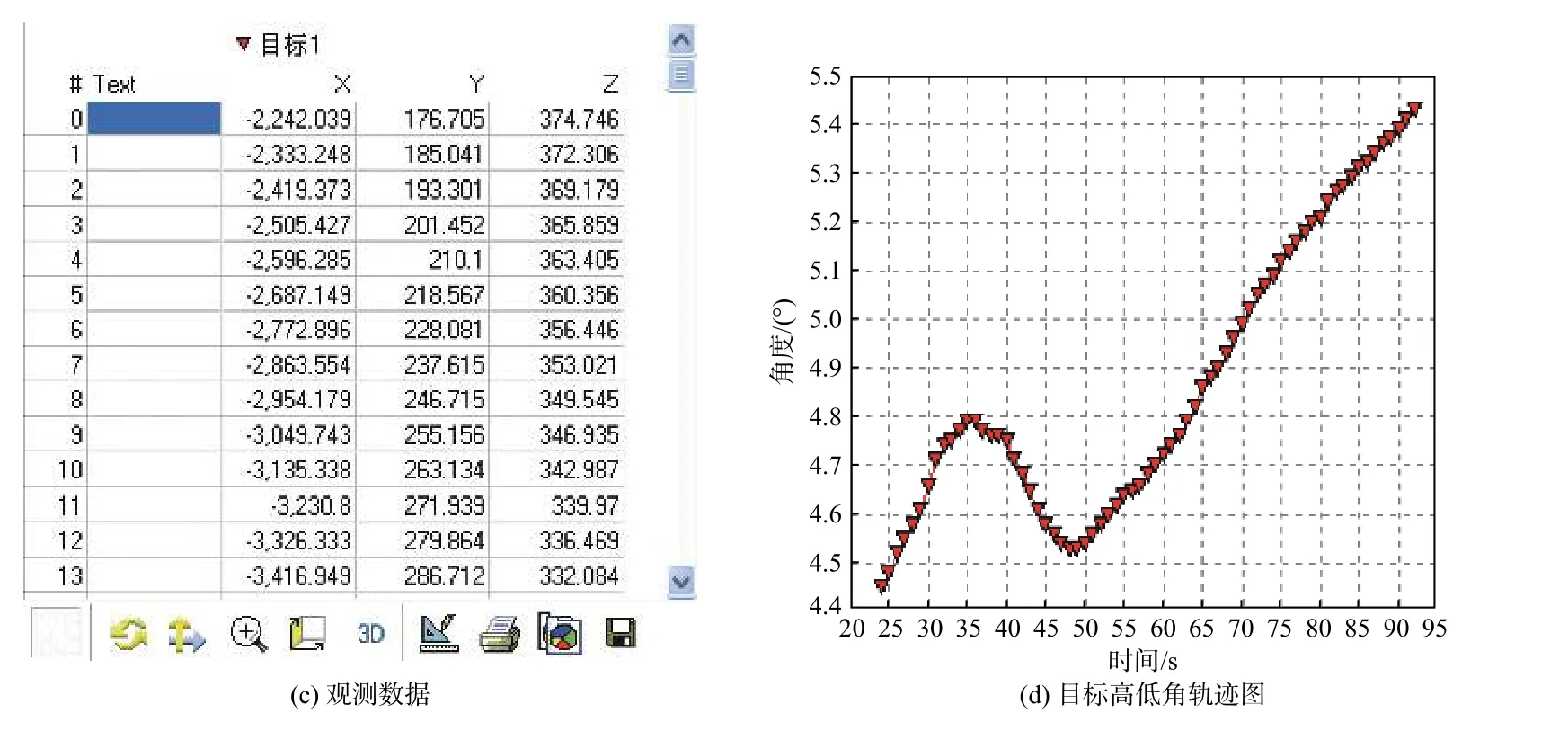
图8 侦察阵列对飞机目标观测实验数据Fig.8 Observation test data of aircraft target by reconnaissance array
5 结论
本文利用阵列式网络具有探测覆盖面积大、可靠性高、环境适应性强等优点,在组网内各侦察设备获得目标连续随时间变化的方位角、高低角等信息基础上,提出了基于阵列光电系统观测数据的坐标转换和数据融合方法,并设计了相关算法软件。通过外场实验,验证了坐标转换模型、数据融合航迹生成等处理流程,验证过程中,通过对空域目标观测的实验,3台侦察设备分别获得了目标的观测数据,中心站经过坐标转换和数据融合方法处理,实时计算出3 坐标空间位置信息,并建立了空间被测目标的三维航迹,经对比与被测目标运动规律一致。实验结果表明,本文提出的方法可有效地应用于阵列光电系统。
猜你喜欢
畜牧兽医科技信息(2022年2期)2022-12-06
导航定位学报(2022年2期)2022-04-11
青年歌声(2019年12期)2019-12-17
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国经贸导刊(2017年28期)2017-12-02
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
现代经济信息(2016年4期)2016-06-20
舰船科学技术(2015年8期)2015-02-27