高炮电视跟踪系统对超低空目标截获概率仿真实验研究
2020-09-29 03:08史海龙廖旭博王晶晶吴彦林
应用光学 2020年5期
史海龙,廖旭博,王晶晶,吴彦林
(1.中国人民解放军63850部队,吉林 白城 137001;2.中国人民解放军32200部队,辽宁 锦州 121000)
引言
随着防空武器技术的快速发展,高炮武器的作战对象逐渐专注于低空、超低空目标,如考核某型履带式自行高炮和某型轮式自行高炮毁歼概率时,要求目标高度为200 m,考核某型弹炮结合防空武器系统对巡航导弹毁歼概率时,要求目标高度50 m,因此对低空超低空目标要重点考核。超低空目标的特性影响高炮武器的多项性能,本文重点研究超低空目标对电视跟踪系统截获概率[1-6]的影响。
电视跟踪系统截获概率通常通过实飞试验的方式考核。出于安全性考虑,目前高度800 m 以下目标多采用靶机代替飞机,国内的靶机以S-300 靶机低空性能最好,在海平面上低空飞行高度可以低至50 m,但在起伏地面上最低飞行高度为100 m~200 m,100 m 以下无法保证安全性,因此无法通过实飞试验的方法考核100 m 以下超低空飞行目标的截获概率。对高空目标考核方法不可能代替对超低空目标的考核,因为对于超低空目标考核时地面的影响不可忽略,比如地杂波对雷达的影响,地面图像和目标同时处于光电系统视场中对光电系统图像处理的影响。
本文通过分析影响截获概率的因素,搭建了软件、硬件环境,建立了一种基于三维虚拟试验场的高炮电视系统对超低空目标截获概率的试验方法。
1 仿真方法
1.1 试验方案
高炮武器系统首先通过搜索雷达发现目标,然后导引光电系统指向目标,使目标进入光电系统视场,光电系统的视频跟踪器对视场内的目标进行图像处理,如果可以稳定地识别出目标,则可认为截获成功。
从上述过程可以看出,光电系统的截获概率主要取决于2个方面:一是雷达导引时,光电系统能否指向目标,这取决于武器系统随动性能及光电系统跟踪转台性能;二是目标进入视场后,能否通过视频跟踪器的图像处理算法识别出目标。对于第一部分,本文通过数学计算方法可以解决;对于第二部分,由于激光测距机并不参与截获过程,因此不需要实际目标的回波,采用仿真方法向视频跟踪器输入图像进行解决。
1.2 截获死界计算
如果目标的位置或运动速度超出了系统的跟踪能力,则称目标进入了系统的截获死界[7-8]。设目标做水平匀速直线运动,速度为v,航路捷径为j,高度为h,目标距航路捷径点距离为d,可计算目标斜距离为

目标方位角为

目标俯仰角为

目标方位向角速度为

式中:rcosε为水平距离;vcosβ为垂直于水平距离的速度。截获死界计算几何原理图如图1所示。

图1 几何原理图Fig.1 Geometric schematic
目标俯仰向角速度为

设随动系统方位向最大角速度为ωβmax,俯仰向最大角速度为ωεmax;随动系统方位向可以360°无限制旋转,俯仰向光电转台俯仰范围为el~eu。则ε、ωβ与ωε满足下式时认为目标不在跟踪死界内,光电系统可以指向目标,即:

在(6)式中仅考虑稳定跟踪情况以及随动系统方位向跟踪角速度,不考虑加速度情况和光电转台跟踪角速度,因为光电转台在方位向旋转范围有限,因此随动系统速度与光电转台速度不可叠加,否则不能在360°范围跟踪[9]。
1.3 目标识别能力考核
目标识别能力考核主要针对系统图像处理能力进行考核。本文采用半实物仿真方法进行考核,主要包括以下3个部分:图像生成器对图像环境的构建,视频跟踪器对图像进行处理,像素坐标对角跟踪精度进行统计,如图2所示。

图2 系统架构Fig.2 System architecture
1.3.1 图像环境构建
图像环境的构建是通过建立三维虚拟试验场进行的[10-13]。
首先对视场、倍率、视距进行仿真,确定投影变换四棱锥,如图3所示。
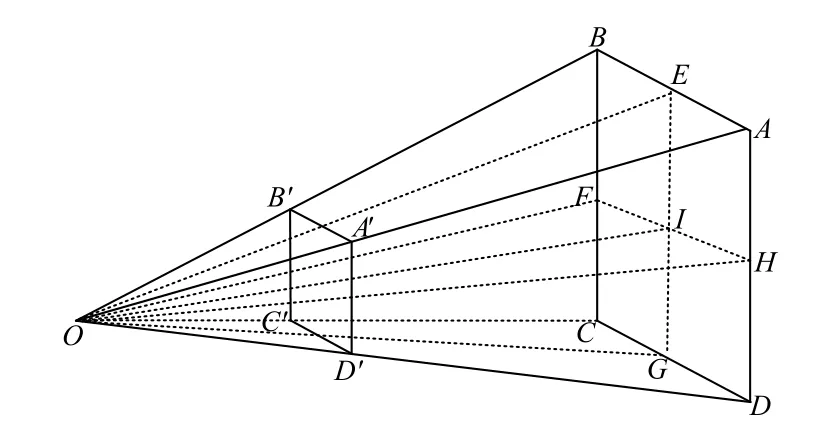
图3 投影变换四棱锥Fig.3 Projection transformation for quadrangular pyramid
图3中,O-ABCD为投影变换四棱锥,位于四棱锥之内的目标投影到面A′B′C′D′上。OI为四棱锥纵轴,长度为视距,∠EOG为俯仰向视场角,∠FOH为方位向视场角。调节面A′B′C′D′的分辨率与视频跟踪器处理图像的分辨率一致。
通过航路数据确定目标坐标,控制虚拟目标在虚拟试验场中飞行。
最后控制四棱锥的纵轴指向搜索雷达测得的目标坐标。在光电系统未跟踪到目标时,高炮系统通过搜索雷达导引光电系统指向目标,即通过搜索雷达确定目标坐标,控制光轴指向此坐标。雷达与目标的误差可以通过误差数学模型生成,或者通过实测数据确定误差。
1.3.2 视频跟踪器对图像的处理
面A′B′C′D′上的图像生成视频后,可以通过图4方法进行数据输入。
正常跟踪过程中,电视跟踪系统的白光跟踪镜指向目标生成图像,输入视频跟踪器产生目标的方位角和俯仰角。在本文方法中,为了使图像被视频跟踪器处理,需要图像注入设备。图像注入设备取代白光跟踪镜向视频跟踪器输入图像,将虚拟试验场产生的视频图像输入图像注入设备,图像注入设备根据白光跟踪镜和视频跟踪器之间的协议对图像进行转换,按协议要求输出图像到视频跟踪器,图像注入设备与视频跟踪器之间协议与实装系统一致。视频跟踪器输出目标中心点像素坐标或叠加了处理信息的视频图像。

图4 仿真过程Fig.4 Simulation processing
1.3.3 截获判定
得到叠加信息的视频或像素坐标后,可以从定性和定量两方面统计[14-15]。观看视频可判定系统对目标跟踪是否稳定,可得到定性结果。像素坐标可以对角跟踪精度进行统计,得到定量结果,步骤如下:
1) 求目标中心点像素坐标与视场中心点像素坐标偏差,用像素个数表示。
2) 确定目标与视场中心点角度偏差。根据视场大小、像素点的个数可以确定每个像素对应的角度。根据像素偏差可以确定角度偏差。
3) 确定目标角度。根据视场中心点(光轴)角度和加偏差角度可得目标角度。
4) 统计精度。用一帧的测量角度减去实际角度得到一次差,按照我国军标[6]方法统计精度。
得到跟踪的一次差和总体误差后,若误差小于规定值,可判断电视跟踪系统截获目标,否则未截获目标。
2 仿真系统实现与试验验证
2.1 仿真系统实现
仿真系统主要由图像生成器和视频跟踪器测试工装这两部分组成。
图像生成器包括模型构建和模型驱动两部分,模型采用OpenFlight格式,用C++编程对模型进行驱动。图像生成器设定好背景环境后,通过读取航路数据,驱动虚拟靶机在虚拟场景中飞行。
视频跟踪器测试工装由图像输入设备、视频跟踪器和数据输出设备组成。图像输入设备将图像生成器生成的视频转换为视频跟踪器接收的格式,视频跟踪器与武器系统的视频跟踪器功能一致,数据输出设备输出叠加的跟踪信息视频。视频跟踪器测试工装和武器系统密切相关,本文中建立了某型轮式弹炮结合防空武器视频跟踪器测试工装。
2.2 测试用例设计
建立图像生成器可以生成待测试视频,作为测试用例,按照从简单到复杂顺序设置。主要关注云(空中环境)、地物(地面环境)、引导雷达误差。
2.2.1 平坦草原环境
目标为F16 飞机,飞机做水平匀速直线运动,高度30 m,航路捷径200 m,速度200 m/s,从10 km外临近飞行。引导雷达无误差,背景为蓝天,无云,平坦路面,地面为草地。高炮武器系统视场方位角4°,俯仰角3°,视距15 km,回转中心(即图2中O点)距离地面2.8 m。跟踪视频效果如图5所示。
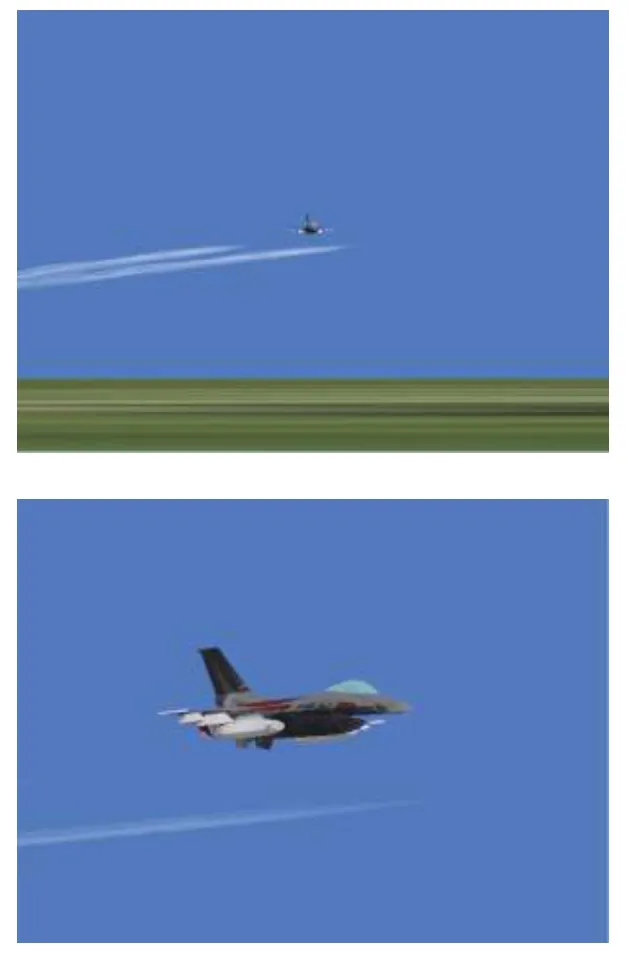
图5 平坦无云环境Fig.5 Flat cloudless environment
2.2.2 城镇环境
目标为F16 飞机,水平匀速直线运动,高度30 m,航路捷径200 m,速度200 m/s,从10 km 外临近飞行;引导雷达无误差;背景为蓝天,无云,村镇环境;高炮武器系统视场方位角4°,俯仰角3°,视距15 km,回转中心距离地面2.8 m。跟踪视频效果如图6所示。

图6 村镇无云环境Fig.6 Cloudless environment in village
从图6中可以看出,对于超低空目标,树木、电线杆、房屋等都可能进入视场,也可能遮挡目标,增加了目标背景的复杂性。
2.2.3 复杂背景环境对光电跟踪设备的影响
设置云对视频跟踪器的影响。目标为F16 飞机,水平匀速直线运动,高度30 m,航路捷径200 m,速度200 m/s,从10 km 外临近飞行;引导雷达无误差;背景为蓝天,有云,平坦路面,地面为草地;高炮武器系统视场方位角4°,俯仰角3°,视距15 km,回转中心距离地面2.8 m。跟踪视频效果如图7所示。
目标为F16 飞机,水平匀速直线运动,高度30 m,航路捷径200 m,速度200 m/s,从10 km 外临近飞行;引导雷达无误差;背景为蓝天,有云,村镇环境;高炮武器系统视场方位角4°,俯仰角3°,视距15 km,回转中心距离地面2.8 m。跟踪视频效果如图8所示。
2.2.4 引导雷达与电视系统匹配性
引导雷达误差决定了目标是否在视场内,通过本文方法可以考核引导雷达的指标与电视跟踪系统的视场是否匹配。
设雷达误差模型为平稳时间序列模型。设系统距离误差和随机误差为µr=0,σr=0,方位角系
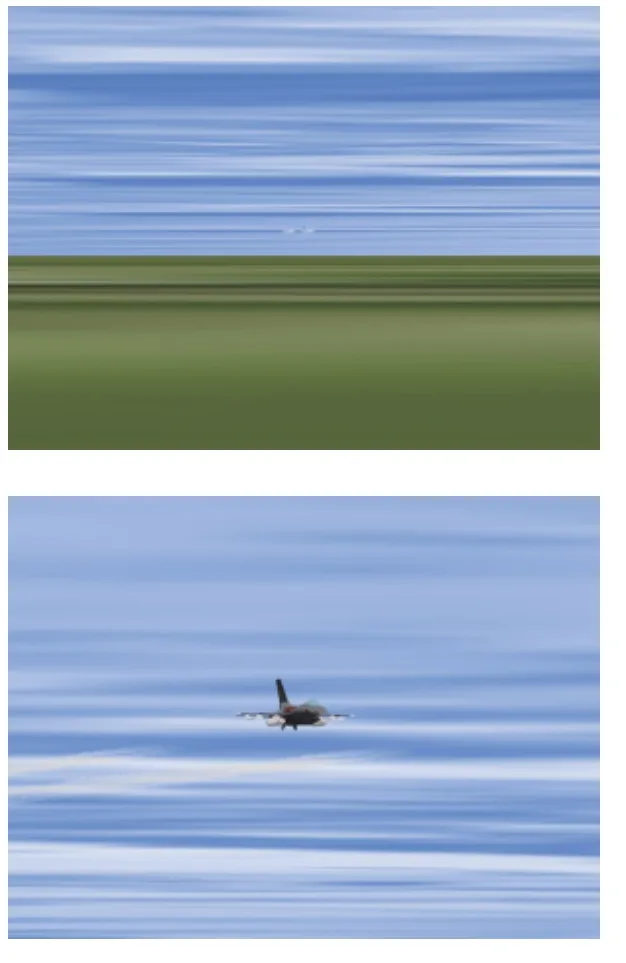
图7 平坦草原有云环境Fig.7 Flat environment with cloud
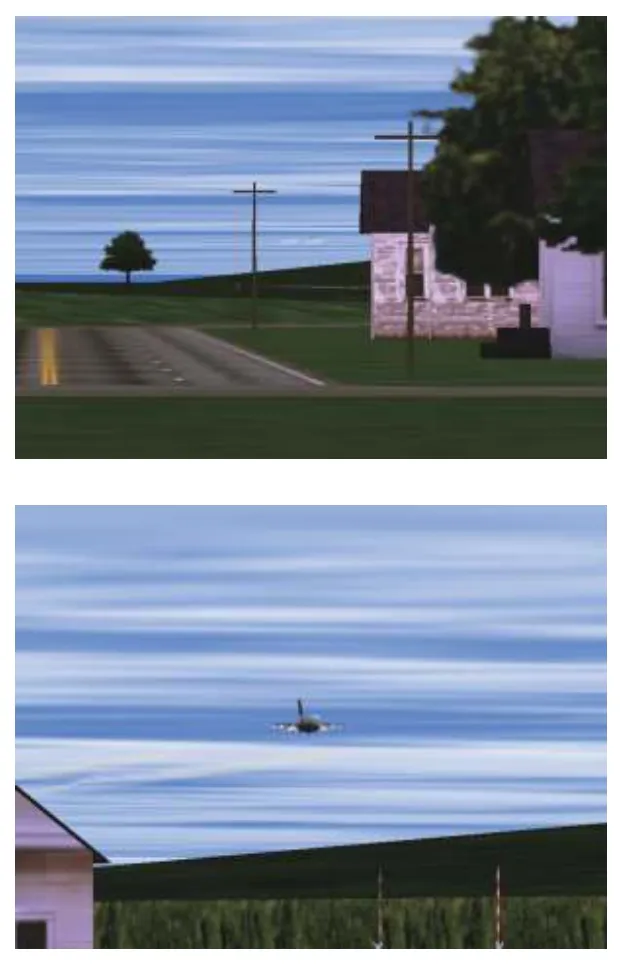
图8 村镇有云环境Fig.8 Cloud environment in village
统误差和随机误差为µa=0,σa=0.4◦,俯仰角系统误差和随机误差为µe=0,σe=0.4◦,取样间隔为10 ms时,距离、方位角、俯仰角误差的相关系数相同,r=0.95。由于引导信息确定光轴指向,因此只需要角度误差即可,距离误差可取0。建立误差序列如图9所示。
图9中横轴表示共取2 000个点,纵轴表示距离、方位角和俯仰角单次标准偏差,单位为密位。以此误差引导光电系统进行跟踪。

图9 雷达误差Fig.9 Radar error
目标为F16 飞机,水平匀速直线运动,高度30 m,航路捷径200 m,速度200 m/s,从10 km 外临近飞行;背景为蓝天,无云,平坦路面,地面为草地;高炮武器系统视场方位角4°,俯仰角3°,视距15 km,回转中心距离地面2.8 m。跟踪视频效果如图10所示。
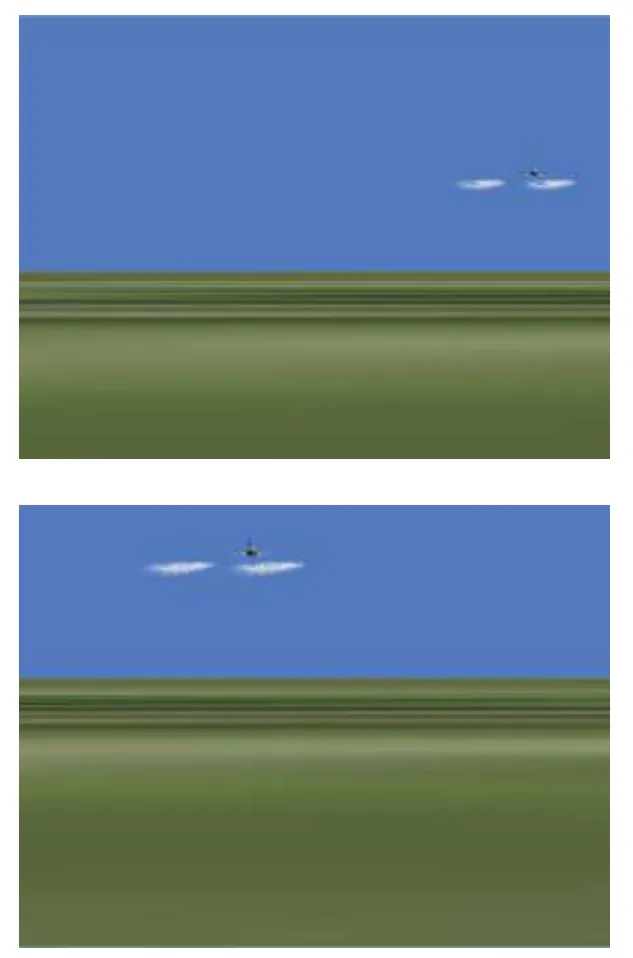
图10 引导雷达存在误差环境Fig.10 Guided radar with error environment
2.3 试验验证
建立测试用例后,本文方法在某型轮式弹炮结合防空武器试验中进行了验证。
首先通过计算确定目标不在跟踪死界范围内,然后用图像生成器生成三维仿真环境,用录屏软件采集下真彩视频,视频分辨率与武器系统中光电跟踪系统采集的视频一致,为256×256像素,视频采用avi格式,avi 编码为Microsoft Video 1。用视频跟踪器测试工装的图像注入设备,将真彩视频转换为视频跟踪器接收的格式,输入到视频跟踪器中进行处理,在处理过程中不发送截获命令,最终得到叠加跟踪信息的输出视频。
由于在弹炮结合武器的指标中不包含对超低空目标的考核,因此只采用图5中定义的草原无云环境对本文方法进行验证。通过在输出视频中观察跟踪状态是否稳定,定性确定是否可以截获,视频效果如图11所示。从试验的输出视频可以看出,跟踪框可以稳定锁定目标。系统搜索目标时,跟踪框显示为红色,当系统稳定跟踪目标时,跟踪框显示为绿色。因此定性认为该武器光电跟踪系统可以截获图5中定义的目标。

图11 目标跟踪效果示意图Fig.11 Object tracking effect diagram
3 结论
本文针对高炮电视跟踪系统目前无法通过实装试验方式对超低空目标截获概率进行考核的问题,通过数学推导跟踪死界模型,构建仿真环境,生成图像,将图像输入视频跟踪器,考核电视跟踪系统的图像处理能力,建立了一种考核电视跟踪系统截获概率的方法。通过实验结果可以看出,由于电视跟踪系统的截获概率只与图像有关,因此可以通过仿真方法进行考核。本文方法在某型轮式弹炮结合防空武器系统试验中得到了应用,验证了本文方法的有效性。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
太阳能(2022年3期)2022-03-29
黑龙江气象(2021年2期)2021-11-05
科学技术创新(2021年25期)2021-09-11
军事文摘(2020年15期)2020-08-15
太阳能(2020年3期)2020-04-08
当代工人·精品C(2019年2期)2019-05-10
中国医疗设备(2019年1期)2019-01-15
计算机应用与软件(2017年7期)2017-08-12
现代兵器(2017年4期)2017-06-02