
1 m口径主反射镜支撑系统的优化设计
2010-11-06 08:04孙宁
中国光学 2010年6期
孙 宁
(1.中国科学院长春光学精密机械与物理研究所,吉林长春 130033;2.中国科学院研究生院,北京 100039)
1 引 言
在光电经纬仪的望远镜系统中,主反射镜是光电测量设备的关键部件,其面形对光学系统的成像质量起着决定性的作用。主镜支撑系统合理与否,在一定程度上影响着主镜的面形以及望远镜的成像质量。当望远镜处于不同俯仰角时,主镜的自重方向与主镜光轴夹角也不同,因此支撑系统必须包括轴向支撑和侧支撑两部分。早在上世纪 60至 70年代,就有了经典的平板理论和动态应力释放法等被用于预先分析支撑系统对主镜面形的影响[1~4]。随着光学技术的不断发展,人们对光电经纬仪的口径要求越来越大,主镜的口径、重量也随之增大,用传统经验对大口径镜面进行设计存在很大风险[5]。目前采用较多的方法是有限元法,该方法能够建立精确的主镜模型,准确计算出主镜在支撑系统和重力作用下的变形。
本文采用有限元分析法对某经纬仪 1 m口径主反射镜的轴向支撑和侧支撑进行优化设计,并计算得出了主镜在工作状态时的镜面变形情况 [6~9]。
2 主镜参量
该平背式非球面主反射镜材料为微晶玻璃(Zerodur),材料的主要物理性质如表1所示。主镜面为抛物面,通光口径为Φ 1 000 mm,外径为Φ 1 030 mm,中心孔直径为Φ 172 mm,工作时主镜镜面面形精度 RMS值优于 λ/30(λ =632.8 nm)。

表1 Zerodur物理性质Tab.1 Properties of Zerodur
3 支撑方案
在大口径光电经纬仪望远系统中,为保证主镜的面形精度,必须采用合理的主镜支撑系统,尽可能减小主镜工作时的镜面变形。为避免将主镜室的结构变形传递到主镜上,主镜支撑一般采用浮动支撑,如使用重锤平衡杠杆支撑或液压支撑等。本文涉及的主镜,采用的是中心轴定位及whiffle-tree轴向支撑与重锤平衡杠杆侧支撑相结合的支撑系统。该支撑系统仅将主镜室变形中平移和倾斜分量传递到主镜上,只会引起主镜的平移和倾斜刚体位移,引起望远镜的指向准确度误差,而不会对面形精度产生影响[10]。
该反射镜的径厚比 <10∶1,且不等厚,因此传统的平板理论解析法已不再适用,而动态应力释放法需对边界条件做很多的简化。近些年工程结构分析设计中得到广泛应用的有限元法的基本思想是将连续的求解区域离散为有限个按照一定方式相互连接在一起的单元组合体,每个单元体与其相邻的单元通过共有的节点相连。节点应力、应变和弯矩可以通过虚功原理进行计算。采用有限元法,借助 Ansys等有限元分析软件,可以准确地建立支撑系统下主镜的数学模型,完成主镜轴向支撑点和侧向支撑位置、支撑方式的优化设计,并计算出主镜的镜面变形。该方法不受主镜的径厚比、厚度变化及镜面形状的影响[10~12]。
4 轴向支撑
轴向支撑引起主镜镜面最大变形出现在主镜光轴竖直向上时的位置,即重力方向与主镜背面垂直,在此位置对主镜轴向支撑进行优化设计。
根据经验并考虑加工装调,选取双圈 18点的支撑方式,支撑点分布排列方案如图1所示。每个支撑点均采用外径为Φ 80 mm、内径为Φ 60 mm的环形支撑垫。

图1 轴向支撑点排列布局Fig.1 Configuration of axial support points
建立主镜实体模型后,约束主镜中心孔上节点径向位移,限制主镜背部支撑垫区域向主镜背部方向的位移,对支撑圈半径进一步优化。根据经验公式[11],双圈优化初始半径分别为R1=0.4227R0,R2=0.8165R0。优化后获得支撑半径的最优值为R1=214.4 mm,R2=438.4 mm。
此时主镜镜面变形云图如图2所示,镜面面形精度 RMS=2.3 nm。

图2 轴向支撑引起的主镜变形云图Fig.2 Mirror deformation diagram due to axial support
5 侧支撑
侧支撑引起主镜镜面最大变形出现在主镜光轴水平时的位置,即重力方向与主镜中心轴垂直,在此位置对两种常用主镜侧支撑进行优化设计和方式选择。
一种常用主镜侧支撑方式是作用于主镜外圆柱面,如图3中 (a)所示。主镜中心孔处由芯轴定位,6组杠杆平衡重锤机构对主镜进行侧支撑,支撑盘为弧形圆盘,与主镜外圆柱面浮动接触,在正、倒镜时分别有 3组机构起作用。同侧 3组机构在工作时提供给主镜的支撑力在重力方向上的分力是相等的,且均处于主镜质心面内 (定义经过主镜质心并平行于主镜背面的平面为质心面)。

图3 两种侧支撑方式Fig.3 Two kinds of lateral supportmanners
建立主镜实体模型后,在主镜外圆柱面上与侧支撑垫相接触处的 3个区域施加均匀分布压力p,对左右两组侧支撑偏角θ进一步优化。支撑垫尺寸长 180 mm、宽 100 mm,取偏角初始值θ0=45°,优化结果为θ1=42°。此时主镜镜面变形云图如图4所示,镜面面形精度 RMS=9.5 nm。
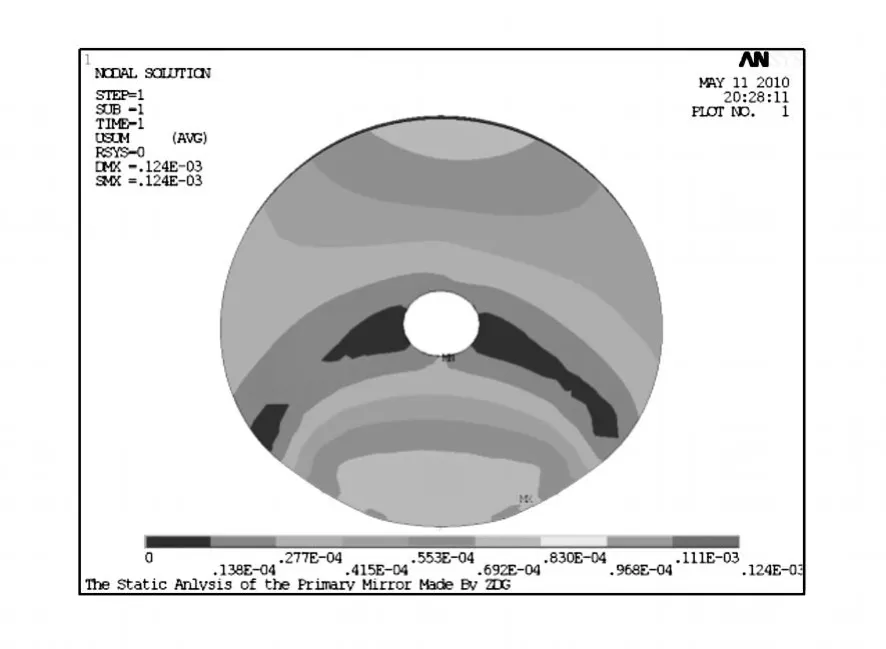
图4 第一种侧支撑引起的主镜变形云图Fig.4 Mirror deformation diagram of the first lateral support
另一种主镜侧支撑方式为作用于主镜背部所开盲孔内圆柱面,如图3(b)所示。主镜中心孔处由芯轴定位,主镜背部均布有 3个盲孔,3组重锤平衡杠杆机构对主镜进行侧支撑,正、倒镜时均起作用。3组机构提供给主镜的支撑力相等,均竖直向上并处于主镜质心面内。
建立主镜实体模型后,在主镜背部 3个盲孔支撑区域内施加轴承力,对 3个均布盲孔所在圆周半径r进一步优化。盲孔内径为Φ 116 mm,取圆周半径初始值r0=300 mm,优化结果为r1=286.8 mm。此时主镜镜面变形云图如图5所示,面形精度 RMS=5.3 nm。

图5 第二种侧支撑引起的主镜变形云图Fig.5 Mirror deformation diagram of the second lateral support
比较图4和图5可以发现,第二种侧支撑方式的效果要明显好于第一种,并且由于第一种侧支撑位于主镜外侧,使主镜室外径尺寸大于第二种,设备重量也相应增大。因此,本文选择第二种侧支撑结构为主镜进行支撑。
在芯轴以及优化后的底支撑、侧支撑的综合支撑系统作用下,对主镜在不同工作角度时的镜面面形精度进行分析,结果如图6所示。该经纬仪处于工作状态时由重力和支撑系统引起的主镜最大面形精度 RMS值为 5.3 nm。要求该主镜加工后面形精度 RMS值为λ/40(λ=632.8 nm),即
15.82 nm,两者叠加后可以得到主镜工作状态时镜面面形精度最大 RMS约为 16.68 nm,即λ/37.9,满足优于λ/30的要求。
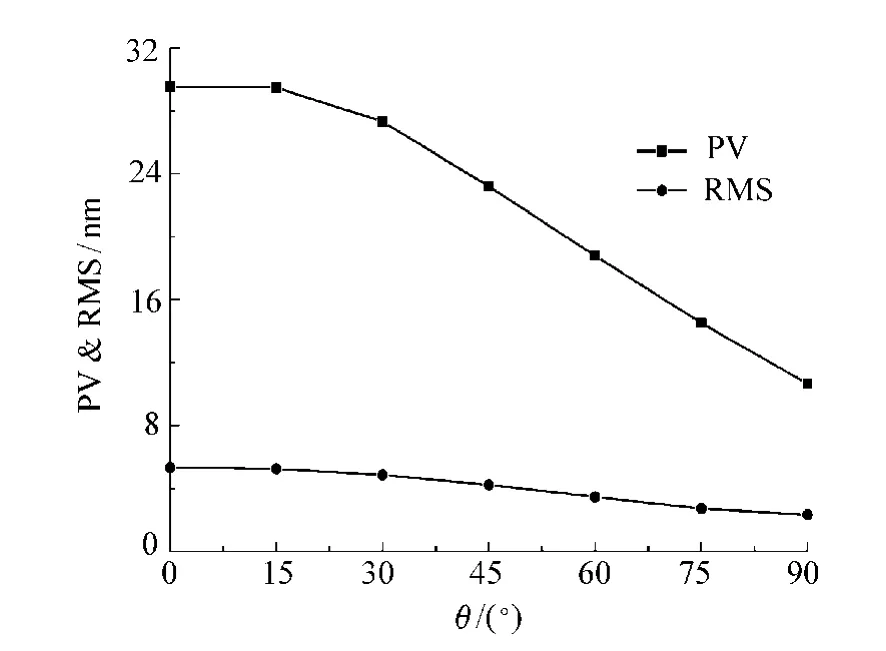
图6 各工作角度镜面面形精度Fig.6 Mirror defor mation precision due to axial support
6 结 论
借助有限元分析软件,建立了主镜实体模型,分析比较了两种侧支撑方式,确定了轴向支撑点位置和侧支撑方式、侧支撑点位置,分析计算得出了主镜处于工作状态时最大面形精度 RMS值,以此判断支撑系统合理与否。该有限元优化设计方法和过程不受主镜直径及厚度的影响,对于平面、球面、非球面甚至异形面主镜均适用。
[1] MALV ICKA J,PEARSON E T.Theoretical elastic deformations of a 4-m diameter opticalmirror using dynamic relaxation[J].Appl.Opt.,1968,7(6):1207-1212.
[2] SELKE L A.Theoretical elastic deflections of a thick horizontal circularmirror on a ring support[J].Appl.Opt.,1970,9(1):149-153.
[3] SELKE L A.Theoretical elastic deflections of a thick horizontal circularmirror on a double-ring support[J].Appl.Opt.,1970,9(6):1453-1456.
[4] NELSON J E,LUBL INER J,MAST T S.Telescope mirror supports:plate deflections on point supports[J].SPIE,1982,332:212-228.
[5] 徐加慧,夏立新,陈诚.基于有限元法的主镜底支撑的优化[J].机械设计与制造,2004(3):67-69.XU J H,X IA L X,CHEN CH.Optimization analysis for the underside support of the primarymirror by the finite element method[J].M achinery Design M anufacture,2004(3):67-69.(in Chinese)
[6] MACKB.Deflection and stress analysisof a 4.2-m diameterpr imarymirrorof an altaz imuth-mounted telescope[J].Appl.Opt.,1980,19(6):1000-1010.
[7] 丁福建,李英才.反射镜浮动支撑的应力与变形分析及支撑参量的优化[J].光子学报,1998,27(11):1041-1045.D ING F J,L I Y C.The stress and strain analysis ofmain reflectorwith uniform pressure support and support angle opt imi-zation[J].Acta Photonica Sinica,1998,27(11):1041-1045.(in Chinese)
[8] 李福,阮萍,赵葆常.重力作用下平面反射镜变形研究[J].光子学报,2005,34(2):272-275.L I F,RUAN P,ZHAO B CH.Studyon the surface deformation of flat reflector under gravity load[J].Acta Photonica Sinica,2005,34(2):272-275.(in Chinese)
[9] 惠彬,李景镇,裴云天,等.大口径折反射式光学系统的光机结合分析[J].光子学报,2006,35(7):1117-1120.HU IB,L IJ ZH,PEI Y T,et al..Integrated analysis of optics and mechanics in larger aperture catadioptric optical system[J].Acta Photonica Sinica,2006,35(7):1117-1120.(in Chinese)
[10] 吴小霞,杨洪波,张景旭,等.大口径球面支撑系统的优化设计[J].光子学报,2009,38(1):129-132.WU X X,YANG H B,ZHANG J X,et al..Optimal design of support system for the large-aperture sphere mirror[J].Acta Photonica Sinica,2009,35(7):1117-1120.(in Chinese)
[11] 郭疆,何欣.大口径空间遥感相机主反射镜支撑设计[J].光学精密工程,2008,16(9):1642-1647.GUO J,HE X.Design of support for primarymirror of space remote sensing camera[J].Opt.Precision Eng.,2008,16(9):1642-1647.(in Chinese)
[12] 王富国,杨洪波,赵文兴,等.1.2 m SiC主镜轻量化设计与分析[J].光学精密工程,2009,17(1):85-91.WANG F G,YANG H B,ZHAO W X,et al..Lightweight design andanalysis of a 1.2 m SiC primary mirror[J].Opt.Precision Eng.,2009,17(1):85-91.(in Chinese)
[13] W ILSON R N.Reflecting Telescope OpticsⅡ,M anufacture,Testing,A lignm ent,Modern Techniques[M].Berlin:Springer,1999:242-259.
猜你喜欢
新能源科技(2022年9期)2022-11-20
荆楚理工学院学报(2022年2期)2022-09-16
航天返回与遥感(2022年3期)2022-07-07
科技信息·学术版(2021年8期)2021-01-10
环境技术(2020年1期)2020-03-06
航天返回与遥感(2018年2期)2018-05-17
郑州大学学报(工学版)(2018年3期)2018-05-03
中国光学(2017年4期)2017-08-01
中国美容整形外科杂志(2016年11期)2016-07-18
中国光学(2015年1期)2015-06-06
