
极紫外光刻系统物镜光学元件的支撑与分析
2010-11-06 08:04:34王辉
中国光学 2010年6期
王 辉
(中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
1 引 言
集成电路制造技术一直按照“摩尔定律”不断向前发展,2010年已进入 45 nm技术节点。随着光刻技术进入 32 nm技术节点,极紫外光刻(EUVL)技术作为极大规模集成电路光刻工艺主流技术的地位日益显现[1]。EUVL技术是193 nm深紫外光刻 (DUVL)技术向 13.5 nm EUV更短波段的合理延伸,其最大限度地集成了传统光刻技术的发展成果。但是由于工作于波长更短的EUV波段,EUVL对非球面加工、面形检测、极紫外多层膜、物镜系统设计与系统波像差检测等技术提出了严峻的挑战[2,3]。
EUVL系统必须达到衍射极限分辨率的要求,根据 Marechal判据,系统波前偏差应小于λ/14,即小于 1 nm(RMS),对应于四镜系统,单个反射面面形要求为 0.25 nm(RMS),对应于六镜系统则更为严格,单个反射面面形要求为0.20 nm(RMS)[4〗。上述多项关键技术中,物镜支撑结构设计和支撑方案选择与最终能否实现该面形要求直接相关。
国外方面,荷兰 AS ML公司于 2005年研制出世界首台产业化原型样机ADT,并于 2010年研制出产业化平台级系统 NXE3100。日本 Nikon和Canon也紧随其后,相继进入了 EUVL产业化评估阶段[5,6]。由于起步较晚,我国目前还处于关键技术积累阶段。
在 EUVL物镜支撑结构领域,尤其是到了0.20 nm(RMS)面形量级水平,国内的研究工作非常有限,而国外的文献中多数也仅涉及到支撑方案选择以及所能达到的效果,很少涉及到具体的支撑结构性能分析和支撑方案中关键问题的处理。为了满足极紫外光刻系统对物镜机械支撑结构的要求,本文针对于上述两个方面的问题进行了具体的研究,以期能够为极紫外光刻系统物镜光学元件支撑的设计与实现提供一定参考。
2 物镜支撑原理与支撑方案
2.1 实际应用支撑设计
对于物镜系统而言,机械支撑结构极为重要,它直接决定着投影物镜的光学性能。支撑方法应尽可能少地引入不可预测的面形变化[7],对于环境变化尤其是温度和振动不能过于敏感[8],并且光学系统相对于整体坐标系能够实现精确定位。另外,支撑方法还要满足短期和长期的稳定性要求,由于工作在真空环境中,要求系统不能放气,且允许镜体与支撑结构安装与分离。
运动学支撑方案能够很好地满足物镜系统对于支撑结构的苛刻要求[9]。如图1所示,运动学支撑中镜体采用三点支撑,每点限制轴向和切向2个自由度,系统整体约束 6个自由度,实现了精确约束;由于其三切向约束力臂最长且相等,保证了设计的稳定性和平衡性。对于局部单个支撑点来说,理想情况下每点都具有 4个自由度,可以实现局部无应力支撑的要求。理想情况下,在约束方向上具有完全的刚性,非约束方向上完全不存在摩擦阻力等因素影响,因此该结构具有完全的重复性。

图1 理想运动学支撑示意图Fig.1 Schematic map of ideal kinematic mount
运动学支撑具体实现过程中,各向自由度功能依靠各种形式的片体结构和柔性铰链结构来实现,元件定位功能依靠总体串并联结构整体刚度实现,如图2(a)所示的双脚架支撑结构,图2(b)所示的片体支撑结构以及图2(c)所示的组合支撑结构。在实现前述极紫外光刻系统对物镜机械支撑的要求方面,这些结构各具特色[10,11]。

图2 实际运动学支撑结构图Fig.2 Kinematic mount structures used in lithographic camera
2.2 检测加工支撑设计
极紫外光刻系统对实际支撑条件下面形要求极端苛刻,重力环境等因素对面形影响非常严重,常用的解决方案是对带实际支撑的光学元件进行原位面形检测,为面形加工提供参考数据,加工检测不断迭代收敛直至满足面形要求,以此来消除重力等因素的影响。
该过程中被检测元件需要不断与支撑设备分离,所以由接触、摩擦等因素引起的面形不确定性成为影响干涉仪检测重复性的一个重要因素,特别是到了 0.25 nm(RMS)的面形量级,这些因素的影响不可忽略。因此在面形检测过程中,需要有特殊设计的检测支撑结构,且特别要保证支撑结构具有高重复性[12]。
如图3所示的高重复性检测支撑,由于采用了高精度滚动轴承运动学支撑结构,检测过程中接触及随机摩擦力将比实际支撑小一个数量级,使得该结构在检测加工过程中能够实现好于0.1 nm(RMS)的面形重复性。

图3 高重复性检测支撑结构图Fig.3 High repeatability mount used in optic measurement
3 支撑方案关键问题对面形的影响
对于物镜系统而言,支撑结构性能和支撑方案实现过程对最终面形实现均有直接影响。因此需要考虑支撑结构设计,同时控制光学元件和支撑结构的装配过程,使影响面形的干扰因素尽量少地引入到系统中,以实现装配后镜面符合 0.25 nm(RMS)的面形要求,同时能够精确定位面形相对于装配基准的空间位置关系。
3.1 支撑结构定位对面形影响的分析
由于元件加工周期等原因,镜体往往采用支撑凸台和光学元件相粘接的形式,这可能引起接触球位置的不确定性,同时机械和光学元件也有一定的加工公差范围[13]。这些因素均会对光学元件和支撑结构的装配定位精度产生影响。表1为运用有限元分析方法得到的支撑装置加工装配关键参数对面形影响的灵敏度分析。
由表1可以看出,在支撑结构的加工和装配过程中,接触副位置偏差和片体厚度偏差对最终面形的影响最为严重。考虑到接触副位置偏差可以通过 CMM进行在线检测修正,该支撑方案中面形最敏感的部分为片体厚度偏差,因此需要在支撑结构公差分配中予以考虑,同时采用电火花线切割技术实现片体厚度和加工精度。这些措施的实施可确保由于运动学支撑条件改变而引起的面形变化在允许范围内。

表1 加工装配参数对面形影响的分析及误差分配Tab.1 Analysis on effect of parameters on optic figure and error distribution
3.2 接触副残余摩擦力对面形影响的分析
支撑装配方案包含球锥接触过程,该过程产生的摩擦力会导致不可预计的随机面形变化,因此最终面形是不确定的量,不确定范围 (重复性)受残余摩擦力影响,同时也受装配方法的影响。有限元仿真分析结果显示,面形应达到0.25 nm(RMS)的量级水平,装配过程接触面所产生的干扰扭矩应好于 1×10-3N·m量级。实现上述苛刻的面形要求必须采取措施减少接触过程中摩擦力对面形的影响。一方面,考虑对接触面做表面处理,通过减小摩擦系数的方法减小残余摩擦力。由于到物镜系统要求在真空环境下工作,接触副不能采用润滑剂,因此采用在接触表面镀二硫化钼的方法使摩擦系数减低 0.1左右。另一方面,从装配方案的角度来减小摩擦力的影响。传统的装配方案中,镜体直接放置于柔性双脚架之上,两者通过球锥副发生接触。接触过程中伴随有镜体面形变化和支腿状态变化,面形稳定后镜体处于近似运动学约束状态,此时镜体中含有的残余摩擦力等干扰因素对面形的影响可以表示为:

其中,Mf1表示传统装配过程中镜体中所引入的干扰扭矩,Kmirror表示镜体刚度。
对传统装配方案进行优化,镜体安装过程分成两个阶段,第一阶段结合工装措施实现柔性支架刚性化,该支撑形式稳定后处于非运动学约束状态,其面形中含有由于过约束而造成的面形变化,同时也含有残余摩擦力等干扰因素所引起的面形变化,此时残余摩擦力造成的影响与式 (1)基本相同;第二阶段去除工装,支腿恢复各向柔性,上述由于过约束和残余摩擦力而造成的镜体局部应力共同有很大一部分传递至柔性支腿中,此时仍作用于镜体的残余摩擦力与支腿局部刚度相关,如式 (2)所示,稳定后镜体处于近似运动学约束状态,残余摩擦力造成的影响变为式 (3)的形式。
其中,Mf2表示优化装配过程中镜体中所引入的干扰扭矩,Kmirror表示镜体刚度,Kleg表示支链刚度。
经过特殊结构设计,支腿各向刚度远小于镜体刚度,显然由式 (3)可知优化方案通过将镜体安装分为两个阶段,残余摩擦扭矩对面形的影响进一步减小,使得摩擦力和其他不可控的干扰因素对面形的影响进一步降低。
另外,还可以对装配后的系统整体施加高频微幅振动,使得接触面静摩擦变为滑动摩擦,通过减小摩擦力来减小摩擦对面形的影响。
4 物镜支撑结构性能分析
4.1 建立支撑结构有限元模型
在支撑结构设计和方案分析过程中,随着面形要求达到深亚纳米量级的水平,光学元件中由支撑结构引入的机械应力和细微温度变化引入的热应力均需予以考虑。有限元方法能够对这些细微影响进行有效的量化分析,为支撑结构设计和支撑方案选择提供参考依据,下面针对图2(a)所示支撑结构进行有限元建模与分析。
建模过程中对次要结构进行了理想化构建,模型中相应结构分别赋予了微晶玻璃,超铟钢和环氧树脂 3种材料属性,如图4所示,为了更好地模拟环氧树脂的性质,在胶层厚度方向上细划了4层网格,其它支撑结构模型建立过程相似。
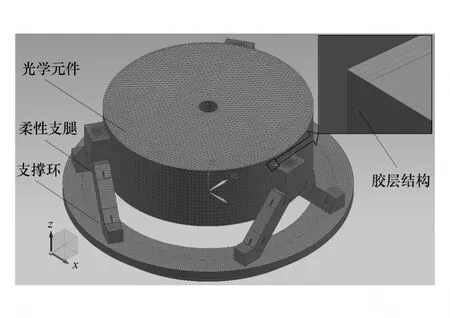
图4 光学元件支撑结构有限元模型Fig.4 Finite element model for mount of optical element
4.2 重力场下支撑结构性能分析结果
如前所述,为了消除重力环境对面形的影响,需要特殊设计高重复性检测用支撑结构,其性能的主要评价指标是重力场下与实际支撑结构面形的接近程度。因此,对图2(a)和图3所对应的支撑结构进行分析评估,如图5所示。结果显示两支撑结构在重力环境下支撑出的元件面形基本相同,面形相差 0.002 6 nm(RMS),说明忽略摩擦情况下检测支撑与实际支撑均满足运动学支撑条件,符合物镜系统对支撑结构的要求。

图5 重力场下支撑结构性能分析结果Fig.5 Performance ofmounts in gravitational field
4.3 常规温控条件下结构热性能分析结果
为了达到衍射极限分辨率,物镜系统对工作环境尤其是温控环境有着严格的要求。对于物镜系统而言,要求首先在温控条件下镜体自身变形很小,同时要求支撑结构由于温度变化产生的变形而引起的镜体变形也要足够小。图6所示的系统热变形分析结果表明,系统温度变化0.05℃与镜体单独变化 0.05℃面形变化基本相同,由机械结构热变形引起的镜体面形变化为 0.001 nm(RMS)量级水平。说明通过支撑装置选用铟钢或超铟钢材料,采用运动学支撑结构,同时配合环氧树脂粘接层结构,支撑装置在温度变化过程中对镜体的影响很小,满足物镜系统对支撑结构的要求。

图6 常规温控条件下结构热性能分析结果Fig.6 Performance ofmounts in conventional temperature conditions
5 结 论
本文分析了符合运动学支撑要求的物镜实际支撑结构和面形检测用支撑结构。针对支撑结构性能分析和支撑方案中两个关键问题的处理进行了深入研究,并提出了相应解决方案,为极紫外光刻系统物镜光学元件支撑结构的设计评估提供了有价值的参考。各支撑结构有限元分析结果显示,通过对支撑方案总关键问题的合理处理,运动学支撑结构热力性能和力学性能良好,能够满足极紫外光刻系统对于物镜机械支撑结构的要求。
[1] WU B,KUMAR A.Extreme ultraviolet lithography:a review[J].J.Vac.Sci.Technol.,2007,B25(6):1743-1761.
[2] HUDY MA R.An overview of optical systems for 30 nm resolution lithography at EUV wavelengths[J].SPIE,2002,4832:137-148.
[3] STULEN R H,S WEENEYD W.Extreme ultraviolet lithography[J].IEEE J.Quantum Elec.,1999,35:649-699.
[4] SOMMARGREN G E,PH ILL ION D W,JOHNSON M A.100-picometer interferometry for EUVL[J].SPIE,2002,4688:316-320.
[5] WAGNER C,HARNED N,KUERZ P,et al..EUV into production with AS ML′s NXE platfor m[J].SPIE,2010,7636:76361H-1.
[6] M IURA T,MURAKAM I K,SUZUKI K,et al..Nikon EUVL development progress summary[J].SPIE,2006,6151:615105.
[7] 王忠素,翟岩,梅贵,等.空间光学遥感器反射镜柔性支撑的设计[J].光学精密工程,2010,18(8):1833-1840.WANG ZH S,ZHA I Y,MEI G,et al..Design of flexible support structure of reflector in space remote sensor[J].Opt.Precision Eng.,2010,18(8):1833-1840.(in Chinese)
[8] 闫勇,贾继强,金光.新型轻质大口径空间反射镜支撑设计[J].光学精密工程,2008,16(8):1533-1539.YAN Y,J IA J Q,J IN G.Design of new type spaceborne lightweighted primary mirror support[J].Opt.Precision Eng.,2008,16(8):1533-1539.(in Chinese)
[9] BLAND INGD L.Principlesof exact constraintmechanical design[C].Eastman Kodak Company,Rochester,USA,1992:68-74.
[10] TI CHENOR D A,KUB IAK GD,REPLOGLEW C,et al..EUV engineering test stand[J].SPIE,2000,3997:48-69.
[11] OSH INO T,SH I RA ISH IM,KANDAKA N,et al..Development of illumination optics and projection optics for high-NA EUV exposure tool(HiNA)[J].SPIE,2003,5037:75-82.
[12] KURZ P.Optics for EUV lithography[C].2nd InternationalWorkshop on EUV Lithography,Burlingame,USA,Oct.2000.
[13] 苗健宇,张立平,吴清文,等.测绘相机光学镜筒设计、加工及装配[J].光学精密工程,2008,16(9):1648-1653.M IAO J Y,ZHANGL P,WU Q W,et al..Design,manufacturing and assembly for optical lens of mapping camera[J].Opt.Precision Eng.,2008,16(9):1648-1653.(in Chinese)
猜你喜欢
华侨大学学报(自然科学版)(2023年1期)2023-01-12 01:15:06
航天返回与遥感(2022年3期)2022-07-07 05:13:36
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
电子技术应用(2021年1期)2021-01-22 09:45:06
卷宗(2018年14期)2018-06-29 07:58:26
航天返回与遥感(2018年2期)2018-05-17 09:37:57
中国医疗设备(2016年6期)2017-01-06 06:12:38
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
光学精密工程(2016年7期)2016-08-23 06:36:49
