
基于数据配准提高光电经纬仪的测量精度
2010-11-06 08:04:42王宗友付承毓
中国光学 2010年6期
王宗友,付承毓,王 芳
(中国科学院光电技术研究所,四川成都 610209)
1 引 言
光电经纬仪是现代靶场测量中重要的测角设备,其目标的定轨是通过交会的方法实现的[1~3],与雷达相比,它具有精度高、布站灵活的特点。随着科技的发展,经纬仪的处理方式已发生了具大的变化,基于传统结构的人工跟踪与胶片摄影的方式已经被自动程序控制与跟踪和数字图像记录方式所取代。
光电经纬仪在目标稳定跟踪阶段,目标位于视场中心,目标相对于设备没有相对运动;而在目标捕获阶段及目标机动阶段,设备为了捕获目标或为了跟踪目标的机动,目标会在视场中产生相对运动,且随着捕获或机动过程的完成,设备对目标的跟踪会又一次回到稳定状态。事后对目标运动轨迹的分析发现,无论是目标的捕获阶段,还是机动阶段,只要目标在视场中存在相对移动,测量精度就会下降,并且相对运动越大,其精度下降就会越严重。
基于上述现象,本文研究了目标相对 CCD视场有相对运动时,设备测量精度下降的原因,并基于数据配准算法提出了提高处理精度的方法。
2 测量精度下降的原因分析
图1所示为关于测量精度下降的一个具体实例,其来源是某设备对某一个目标俯仰测量结果。为了便于比较,把脱靶量一阶差分 (以“-”表示)与位置 (高低)一阶差分 (以“.”表示 )以一定的比例绘于图1中。从图1中可以看出,在目标的捕获阶段 (前 100点)及目标的机动阶段 (1 200~1 600点之间),由于目标与光电经纬仪之间的相对运动较大,测量精度下降明显 (对于一个运动轨迹未知目标的测量精度可以用测量位置的一阶或二阶差分去掉趋势项后的方差即数据的离散性大小来进行评价)。

图1 当目标相对于设备有相对移动时测量精度降低示意图Fig.1 Measuring precision falling when there is a movement be tween target and device
虽然,测量误差的原因是多方面的,但影响其测量精度的原因主要有两点:(1)时空未配准,即光电经纬仪编码器的测量值与电视脱靶量的测量值时间未对准。(2)传感器的量纲标定不精确,表现在当目标不在视场中心时,所测量的目标位置不准确。由原因 2引起的测量精度下降,可以通过修正量纲的方法进行校正,本文不做分析。

图2 电视外同步工作状态示意图Fig.2 Sketch map of video working synchronously
时空未配准的原因是多方面的,在早期的经纬仪中,电视系统与编码器工作在异步状态,必然存在时间的未配准状态。在近几年研制的设备中,电视与编码器虽然都工作于同步状态,但从同步机理[4]上看 (如图2所示),仍然存在编码器与电视脱靶量的时间未配准情况。从图2中可以看出,工作在这种同步模式下的电视,在整个系统同步时钟的上升沿 (也就是编码器锁存位置数据的时刻),电视开始曝光,在电视曝光结束时刻完成曝光。如果是点目标,则只能以能量积累重心作为处理脱靶量的输出,与图2中的脱靶量输出对应时刻相对应。对于扩展目标,如果以能量重心进行脱靶量输出,则也与图2中的脱靶量输出对应时刻相对应;如果把目标运动方向的前边缘作为脱靶量输出 (目前大多数采用的是这种方式),则与图2中电视曝光结束时刻相对应。由此可见,工作于这种同步状态下的电视传感器的脱靶量输出与编码器的结果是时间未配准的。当目标相对于视场有相对运动时,必然会导致测量精度的下降。
3 基于数字处理的时间配准算法
解决数据未配准产生的测量精度下降问题,可以采用根据电视不同的曝光时间产生使曝光过程的中间时刻 (图2中的脱靶量输出对应时刻)与外同步的上升沿 (图2中的电视开始曝光时刻)对齐的方法,此方法的硬件实现较麻烦,在此不进行论述。本文采用数据配准算法进行测量结果修正,此算法不必做任何硬件改动。为了研究问题的方便,采用了固定点目标进行分析。
在进行分析之前,先给出固定点目标测量结果精度评价准则(方差判定准则):对于同一个固定点目标做 A、B两次测量,如果 A的测量方差小于 B的测量方差,就判定 A的测量精度优于 B的测量精度。
系统同步时刻电视脱靶量,事后可以通过数字插值[5]的方法得到。分析不同测量数据发现,在相对较短时间内,脱靶量的值可以用一个不高于二阶的多项式进行很好拟合。因此,对于同步测量时刻脱靶量,可以利用它前后适当点数测量数据的二次拟合多项式[6~8],并用数字插值的方法来进行估计。
但此方法的一个前提条件是图2中的脱靶量输出对应时刻的相对延迟为已知 (或者能够先解算出来)。关于相对延迟时间的解算算法请参考第 4节。本节在针对相对延迟时间已知情况下,讨论测量数据时间配准算法。

式中系数a、b、c可以用最小二阶乘的方法进行求解。一旦解算出多项式的系数,则对t∈[x-n,xn]任意时刻都可以得到关于脱靶量Xt的一个比较理想的估计值。因此,如果脱靶量的测量延迟为Δt,则可以通过式(2)进行零时刻脱靶量的估计。

也就是说,在相对延迟已知情况下,可以通过多项式拟合数字插值[2]得到测量时刻脱靶量估计值,进而得到测量时刻目标位置值的较高估计。
4 实验验证
图3给出了在电视曝光时间为 1.5 ms(即相对延迟为 0.75 ms),设备相对于一个固定点目标做小幅的正弦运动,电视一个像素的分辨率为12.715″时,数据配准前后对此点目标进行测量得到的示意图 (图中单位为“°”,为了便于区分,对配准后的数据向下作了平移),测量数据配准前后的测量方差分别为 6.71″,4.51″,数据配准后测量方差为配准前测量方差的 67%,数据配准后,测量方差约为 1/3 pixel。多次实验证明:数据配准算法可以使光电经纬仪的测量精度从 1/2 pixel分辨率提高到 1/3 pixel分辨率。

图3 固定点目标数据配准前后测量精度示意图Fig.3 Measuring precision before and after data matching
另外,从图3可以看出,即使在测量数据配准的情况下,测量结果的误差并非随机分布,而是与脱靶量的变化存在一定的关联性。对于这个现象可以从以下几个方面进行解释:(1)编码器的测量误差。在以上的分析中,假定编码器的测量值是没有误差戓误差可以忽略不计。但是,当所分析精度与编码器的测量精度相当时,就不能不考虑其测量精度;(2)脱靶量的提取误差。在数据分析中发现,当相对移动较快时,电视脱靶量的提取会发生跳变,此影响可在事后处理中去除。(3)其它方面,主要是 CCD成像畸变、量纲标定的误差[4]等。这些因素的影响超出了本文的讨论范围。
量纲标定误差的影响可以从图4得出 (为了便于区分,对校正后的数据在垂直方向上向上作了适当平移)。在量纲标定误差校正前,数据配准后仍存在明显的趋势项 (图中以“…”表示);而在进行量纲误差标定校正后趋势项明显消失 (图中以“-”表示)。
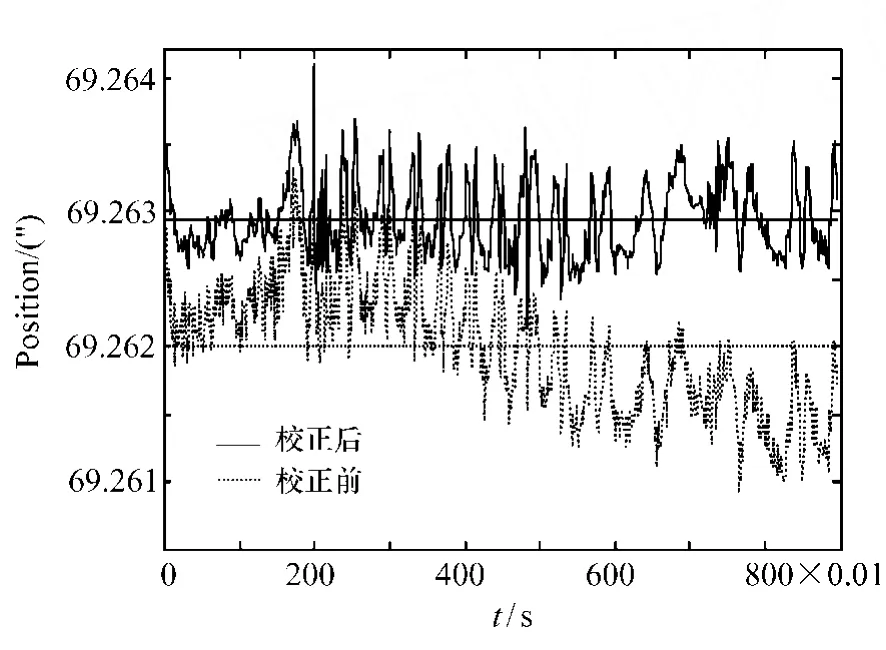
图4 校正量纲标定误差以提高测量精度Fig.4 Improvement of measuring accuracy by correcting dimension error
5 相对延迟时间的求解算法
本文给出一个简单可行的求取相对延迟时间的方法。在测量前,找出一个比较理想的固定点目标,使设备相对于目标做小幅的正弦摆动,且目标不出整个 CCD视场的 2/3,记录下一组数据,通过对这组数据的处理就可以得到电视传感器的相对延迟。具体作法为:对脱靶量数据进行 ±1帧之间数据配准,如果有一个配准时延ΔT对于此点目标的测量方差最小,ΔT就是此电视传感器的相对时延的最佳估计。图5给出了图3所用数据的不同配准时间及其对固定点目标测量的方差图。从图5中可以看出配准时延为 0.75 ms时,数据测量方差最小,与理论分析相符。

图5 不同时间配准下的测量方差Fig.5 Measuring varianceσ2at different correcting time
6 结 论
针对光电经纬仪在目标相对于视场有相对移动时测量精度下降的情况,本文基于电视曝光原理给出了原因,并通过测量结果提出了时间配准校正方法及相对延迟测量方法。仿真结果证明了此方法对改善测量结果的有效性与实用性。
本文的分析是基于编码器的测量精度很高(电视的分辨率远远大于编码器的分辨率)以至于其测量误差可以不计这个假设之上的,如果不满足这个假设,则必须要考虑编码器的测量误差[9]。
[1] 傅晓程,王小海.光测设备数据交汇计算方法研究[J].浙江大学学报 (理学版),2008,35(2):173-177.FU X CH,WANG X H.Reach on the algorithm for data exchange of optical equipments[J].J.Zhejiang University(Science Editionhttp),2008,35(2):173-177.(in Chinese)
[2] 蒋平,高晓东,吴钦章.雷达-光电经纬仪联合定位模型及误差分析[J].光电工程,2005,32(6):66-68.J IANG P,GAO X D,WU Q ZH.Model for joint positioning of radar and electro-optical theodolite and its errors analysis[J].Opto-Electronic Eng.,2006,32(6):66-68.(in Chinese)
[3] 吴能伟,陈涛.基于最小二乘估计的多站交会方法[J].光电工程,2008,35(12):1-4.WU N W,CHEN T.Multi-station intersection method based on the least square estimation[J].Opto-Electronic Eng.,2008,35(12):1-4.(in Chinese)
[4] 杜云飞,刘波,胡炳樑,等.全帧型 CCD数码相机曝光时间的精确控制[J].光子学报,2009,38(4):1025-1028.DU Y F,L IU B,HU B L,et al.Precision control technology of exposure time for full frame CCD digital camera[J].Acta Photonica Sinica,2009,38(4):1025-1028.(in Chinese)
[5] 丁丽娟.数值计算方法[M].北京:北京理工大学出版社,1997:89-128.D INGL J.Num erical CountM ethod[M].Beijing:Beijing Institute of Technology Press,1997:89-128.(in Chinese)
[6] 苏金朋,阮沈勇.MATLAB实用指南[M].北京:电子工业出版社,2002.SOU J P,RUAN SH Y.MATLAB Practicality Guide[M].Beijing:Publishing House of Electronics Industry,2002.(in Chinese)
[7] 徐士良.C常用算法程序集[M].2版.北京:清华大学出版社,1997.XU SH L.The C Language Comm on A rithm etic Program s[M].2nd ed.Beijing:TsinghuaUniversity Press,1997.(in Chinese)
[8] BROCK WELL P J,DAV IS R A.时间序列的理论与方法[M].2版.田铮译.北京:高等教育出版社,2001.BROCK WELL P J,DAV IS R A.T im e Series:Theory andM ethods[M].2nd ed.Tian Z.Beijing:Higher Education Press,2001.
[9] 卢涵宇,金紫阳,胡迪.增量式编码器数据采集[J].重庆邮电学院学报 (自然科学版),2006(z1):107-108.LU H Y,J IN Z Y,HU D.Data acquisition for increment encoder[J].J.Chongqing University Posts and Telecommunications(Natural Science),2006(z1):107-108.(in Chinese)
[10] 薛丰廷,彭鼎祥.红外跟踪系统中的自适应阈值分割[J].激光与红外,2008(4):386-388.XUE F T,PENG D X.Adaptive threshold algorithm in IR tracking system[J].Laser Infrared,2008(4):386-388.(in Chinese)
[11] 郑长勇,代月花,陈军宁.红外小目标检测跟踪系统设计[J].计算机工程与应用,2009(34):59-62.ZHENG CH Y,DA I Y H,CHEN J N.System design of s mall target detection and tracking in infrared[J].Com puter Eng.Appl.,2009(34):59-62.(in Chinese)
猜你喜欢
宇航计测技术(2022年2期)2022-06-01 09:34:44
中国光学(2021年6期)2021-11-25 07:48:32
中国医疗设备(2019年1期)2019-01-15 12:10:54
测控技术(2018年3期)2018-11-25 09:45:50
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电子设计工程(2017年20期)2017-02-10 03:39:29
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
电子器件(2015年5期)2015-12-29 08:42:24
激光与红外(2015年10期)2015-03-23 06:07:18
