
上肢康复机器人研究进展
2020-09-25 05:22余灵喻洪流
生物医学工程学进展 2020年3期
余灵,喻洪流
1. 上海理工大学康复工程与技术研究所(上海,200093)2. 上海康复器械工程技术研究中心(上海,200093)
0 引言
随着人口老龄化问题的日益加剧,世界各地由中风引起的肢体功能障碍患者的人数逐年增加。目前,中风已成为我国成年人群致死致残的首位病因。中风可引起持续性脑组织损伤和功能障碍,85%的患者会出现偏瘫症状[1]。偏瘫引起的患者肢体损伤特别是上肢损伤会导致日常生活活动困难,严重影响患者生活质量。因此上肢的康复是至关重要的。除中风外,脑瘫、多发性硬化、帕金森病和脊髓损伤等神经系统疾病也会引起患者的上肢功能损伤,同样需要相应的康复措施来改善运动功能[2]。
临床实践已经证明基于脑可塑性理论的康复训练是一种有效的治疗方法。但这些疾病的康复过程周期比较长,传统的康复训练需要手工操作,耗时费力,而且长期治疗服务和护理都是人员密集型的方式。由于我国人口基数大,专业康复治疗师数量严重不足,康复服务的提供不足会进一步增加残疾,导致治疗成本增加的恶性循环[3]。这对家庭和社会造成长期和高度的经济负担。同时训练强度不足造成的康复效果不理想也会对患者身心造成长远影响。
在此情况下,上肢康复机器人能够长时间提供强化物理治疗,克服了传统治疗师人手不足或疲劳等因素影响,能够补充常规康复治疗局限性[4],越来越受到社会的广泛关注。
1 上肢康复机器人分类
上肢康复机器人最早出现于20世纪90年代。目前,国内外陆续设计出了多种多样的上肢康复机器人,分类方式也较多: 比如按训练方式可分为主动、被动和主被动机器人; 按驱动方式可分为电动、气动和自身力源; 按活动范围可分为空间和平面式; 按减重支撑方式可分为端点支撑、外骨骼支撑、悬吊支撑等。
最常用的分类方式是按机器人的构型将上肢康复领域的机器人系统分为两类: 末端执行器式和外骨骼式[5]。由于不同分类方法存在交叉,针对不同的特点,外骨骼和末端执行器式上肢康复机器人又可以进一步细分。此外,为了寻求患者舒适性,近年来基于柔性材料的柔性外骨骼机器人也被引入上肢康复的应用。本文将通过图1的分类方式分析上肢康复机器人的发展状况。

图1 上肢康复机器人分类Fig.1 Classification of upper limb rehabilitation robots
2 上肢康复机器人研究现状
2.1 末端执行器式上肢康复机器人
末端执行器上肢康复机器人在患者肢体的远端点上工作,通过端部连接到患者的手或前臂。刚性连杆是平面末端执行器式上肢康复机器人采用的常见机构。第一个专为康复训练设计的机器人装置MIT-Manus及其商业化版本InMotion Arm就采用了连杆机构,见图2(a)。其主体是五连杆结构,具有两个自由度,可以帮助患者完成手臂的平面运动,同时引导使用者手臂沿着不同轨迹运动,并可同步反馈手臂运动参数[6]。上海卓道医疗科技有限公司研发的Arm Guider康复机器人,其采用并联四连杆机构,可提供个性化轨迹,患者可以在平面内完成被动、助力、抗阻三种模式训练。
除了利用连杆铰接机构的转动实现平面定位外,利用连杆的二轴滑动机构同样也可实现二维空间的定位。西班牙瓦拉多利德大学开发的E2Rebot机器人,见图2(b)。其是基于笛卡尔的XY轴,采用十字轴结构。机器人有被动引导和主动辅助两种康复模式,两种模式均基于图形化环境,利用不同的游戏治疗[7]。上海傅利叶智能科技公司研发的上肢智能康复机器人Fourier M2机器人,公司其机械结构同样基于二维坐标系,利用双电机独立驱动,机器的XY运动机构类似字母“H”,与十字轴结构相比,没有X轴电机一起运动的负担,可为患者提供四种训练模式。在视、听、触多维交互的游戏场景中,模拟各种实际生活中的力学反馈,为使用者提供多样的目标导向性训练。
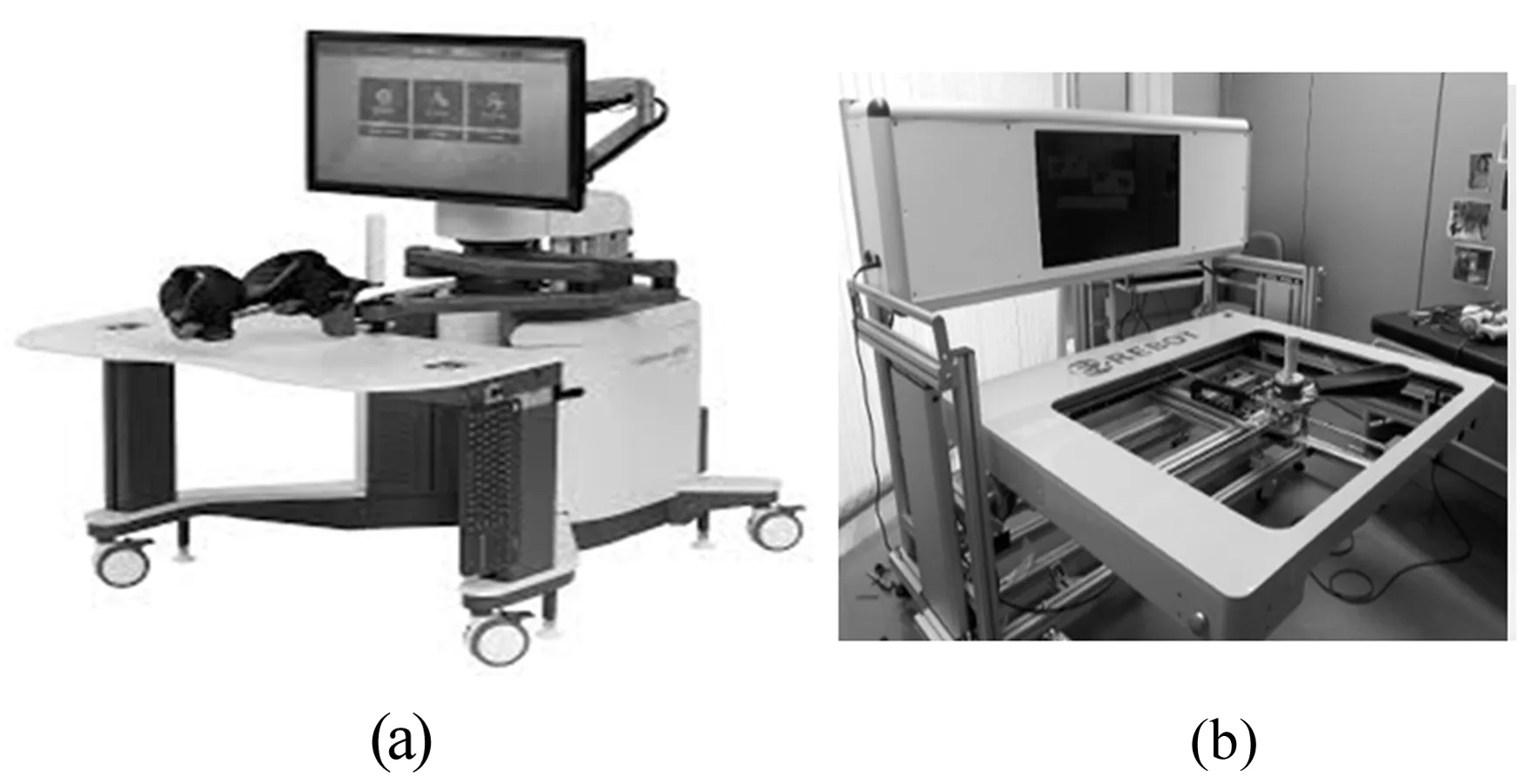
图2 平面刚性康复机器人Fig.2 Plane rigid rehabilitation robot
除了刚性机构外,电缆也被用来引导上肢平面运动,Sophia-3机器人,见图3。它是利用三条电缆控制患者抓握的手柄,还可调节平面倾斜角度实现不同角度平面内的上肢康复训练。

图3 平面牵引式康复机器人Fig.3 Plane traction rehabilitation robot
另外,由于末端执行器式只在末端作用于患者,更直接的是类似磨砂板的桌面式上肢康复机器人。意大利公司Humanware开发的MOTORE机器人,见图4,由三个全向轮驱动受损的上肢躺在前臂支撑上,并且将设备放在专用桌面上利用光学读取位置[8]。中国科学院设计的Reha-Maus康复机器人,也是同种类型,利用全向轮实现上肢平面内的灵活运动[9]。

图4 桌面式康复机器人Fig.4 Desktop rehabilitation robot
除平面运动外,辅助患者进行多自由度的空间范围内运动的末端执行器式上肢康复机器人也种类多样。意大利的Michele等设计研发的DARTAGNAN机器人,见图5(a),它采用混合串并联结构,利用杠杆原理添加配重平衡整个结构的重量,患者手臂可在不同高度以进行主、被动及抗阻模式训练[10]。
美国巴雷特技术公司推出的用于神经康复的末端执行器机器人医疗设备BURT,基于公司的WAM手臂连杆,提供三个运动平面,感测患者的作用力,并相应地调整其扭矩,可针对肩部复合体和肘部进行上肢康复训练[11]。 Motorika公司开发的固定式手臂康复机器人ReoGo,利用先进的全机动机器人手臂,帮助患者上肢在3D空间中进行大范围可重复的运动,提供五种操作模式适用于中风康复阶段的各种患者[12]。
iPAM Mk2是一个双机器人系统见图5(b),拥有两个相同的机器人手臂,通过远端矫形器附着在靠近手腕的前臂上,而近端矫形器附着在上臂的中点,通过每个机器人提供三个活动自由度,可以实现肩部前进后退,屈伸收展,内外旋转以及肘部屈伸运动[13]。

图5 空间连杆式康复机器人Fig.5 Spatial linkage rehabilitation robot
同样,电缆也被用来牵引上肢末端进行三维运动,NeReBot,见图6(a),是由意大利 Padua大学设计的3自由度的绳索悬吊上肢康复机器人[14],GENTLE/s,见图6(b),是由英国雷丁大学设计悬吊上肢康复机器人[15],通过悬吊机构固定并拉动患者的相应关节,带动患者进行康复训练。

图6 空间悬吊式康复机器人Fig.6 Space suspended rehabilitation robot
2.2 刚性外骨骼式上肢康复机器人
外骨骼机器人与肢体的解剖结构并排操作,可分为穿戴式和非穿戴式。穿戴式外骨骼完全穿戴在使用者身上,要求体积小重量轻,因此结构较为简单,多是没有外动力的,主要用于人体力量增强或辅助,帮助特殊职业人群减轻肌肉疲劳和劳动强度,提高工作效率。这一特性也能够帮助患者实现上肢部分功能代偿和生活辅助,但针对多关节康复训练的穿戴式上肢外骨骼机器人较少。一方面是因为进行被动康复训练的外骨骼机器人必须包含动力源及控制系统,体积和重量受限,另一方面是因为上肢功能障碍患者,特别是偏瘫患者,其下肢功能也受损,单纯上肢可穿戴性并不十分重要。
因此,用于上肢康复训练的外骨骼机器人多采用非穿戴的肩端固定式,即将外骨骼手臂肩端固定在平台上。一是利用现成轮椅平台,上海理工大学研发的一款外上肢骨骼康复机器人,见图7(a),适配在轮椅上使用。米兰理工大学Marta等设计的BRIDGE机器人,见图7(b),也和轮椅平台配合使用[16]。轮椅平台的优点是移动便捷性,但嫁接在轮椅平台的上肢康复机器人不可能集成复杂的外骨骼机械臂,功能多样性会受损。
目前,商业化程度较高的智能上肢外骨骼康复机器人基本利用便捷的移动平台或者直接拥有独立的座椅系统。如瑞士Hocoma公司研发的Armeo Spring,通过弹簧储能来平衡对应机械臂关节的重力,ArmeoPower,支持完整的运动链,从肩膀到手指都可以同时进行治疗,通过将支持患者运动的设备与虚拟现实中的趣味运动游戏相结合,来帮助患者恢复手臂和手的功能[17]。
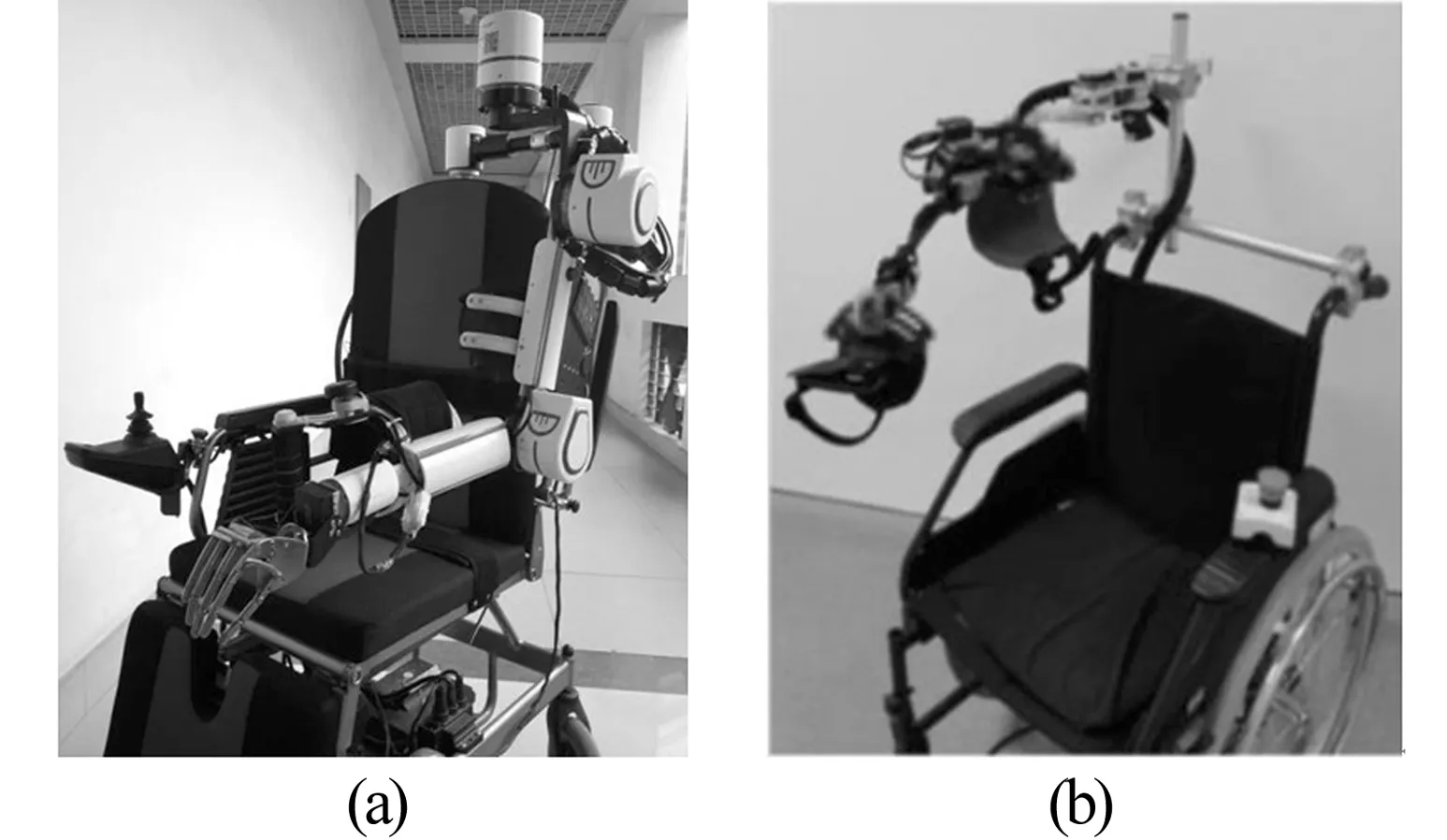
图7 轮椅平台康复机器人Fig.7 Wheelchair platform rehabilitation robot
国内类似商业化的上肢康复机器人也层出不穷。比如广州一康公司推出的A6上肢康复机器人,见图8(a),上海电气推出的Flexo-Arm1,见图8(b),等等。安阳神方公司推出的灵动康复机器人拥有固定座椅,此种类型机器人一般体积庞大,不易移动。同样带有座椅的还有上海理工大学研发的中央驱动式上肢康复机器人,见图9(a),通过同步带、锥齿轮传动机构将动力传输至肩、肘关节处。机械臂可以进行主被动康复训练,还可按设定轨迹进行多自由度训练[18]。以上上肢康复机器人均为单侧训练式机器人,利用旋转、滑动单侧机械手臂实现左右互换。
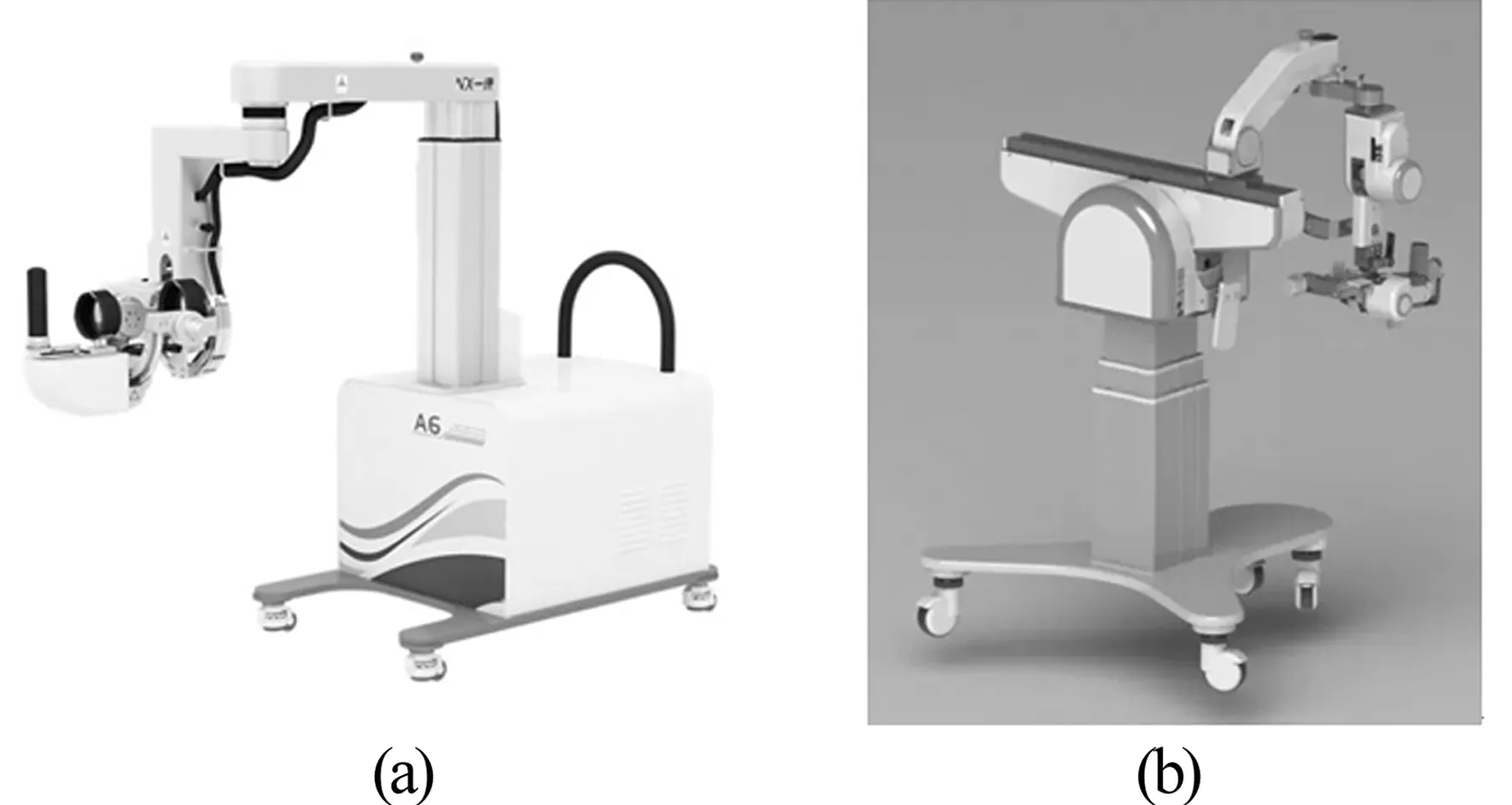
图8 便捷移动式康复机器人Fig.8 Convenient mobile rehabilitation robot
同样拥有座椅的意大利ALEx机器人,见图9(b),是一个固定的框架外骨骼,可同时接合两个臂从而允许双侧康复训练[19]。德克萨斯大学奥斯汀分校开发的两臂机器人康复外骨骼HARMONY可容纳整个上身实现双侧康复训练,具有14个轴,可实现广泛的自然运动[20]。
这些智能上肢康复机器人拥有复杂驱动及控制系统,能进行多关节多自由度主被动训练甚至抗阻训练,训练模式多样,结合虚拟现实和游戏,患者体验度更高,但体积及重量较大,使用环境受限。
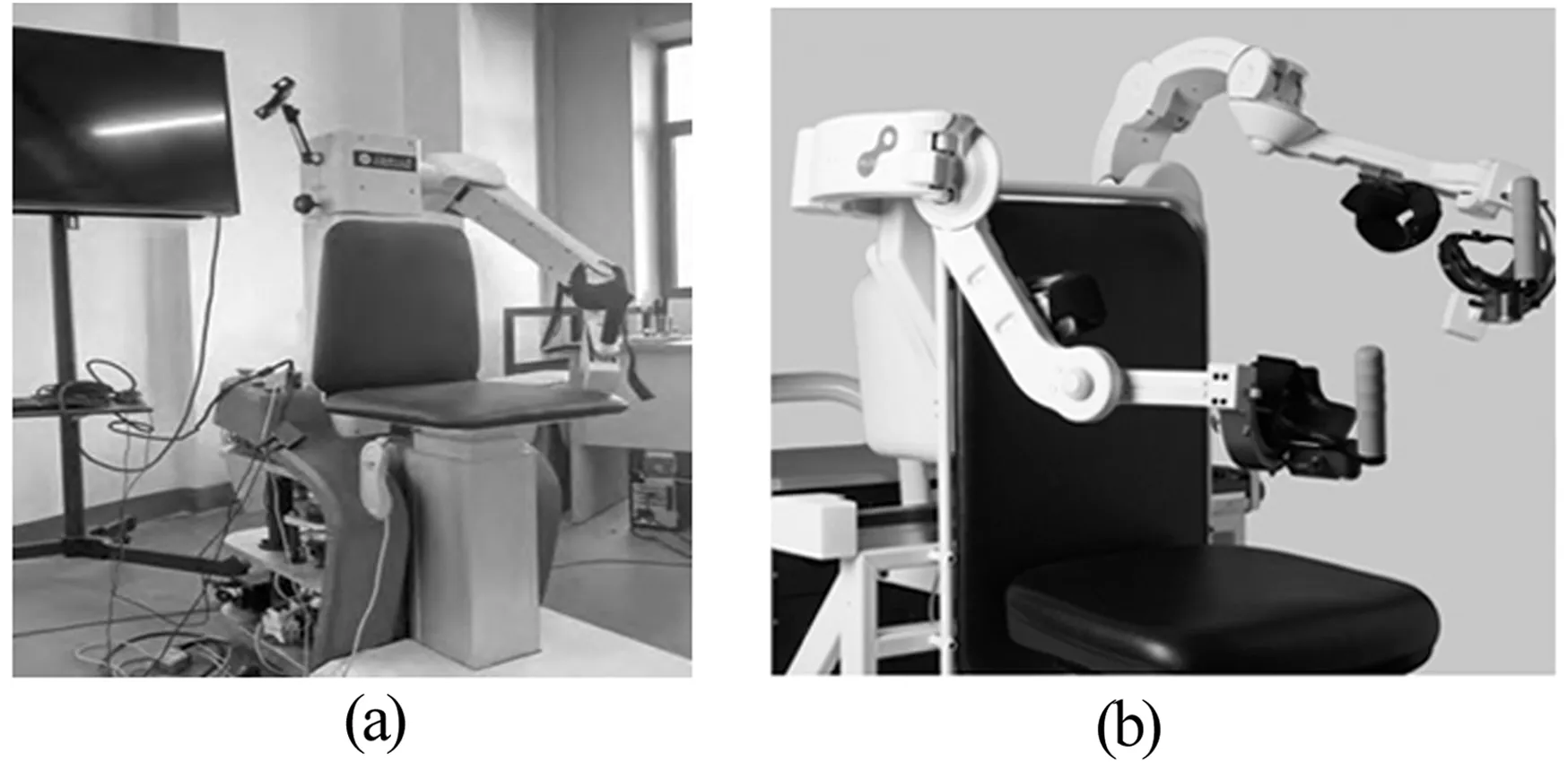
图9 座椅系统式康复机器人Fig.9 Seat system rehabilitation robot
2.3 柔性外骨骼上肢康复机器人
柔性外骨骼和刚性外骨骼机器人设计的工作原理实际都是利用驱动的外部机械力,以帮助患者进行所需的关节运动。传统刚性材料外骨骼尽管尺寸紧凑,但很重且顺应性相对较低。为了寻求患者舒适性,以及自然运动的流畅性,基于柔性材料的软机器人用于上肢康复的应用。柔性材料包括鲍登电缆、气动肌肉、气囊或者由于热或电流而收缩的细丝等。
由日本松下母公司开发的REALIVE, 见图10(a),是最早的柔性外骨骼之一,一个袖子装有非接触式传感器,另一个装有8个充气肌肉,可通过健康手臂带动患侧手臂运动[21]。Galiana等设计了一种用于肩部康复的可穿戴软机器人,见图10(b),该装置上部穿有集成的电缆驱动系统,嵌入式肢体位置感应系统,电动执行器组件和控制器可以穿在上半身上以产生有效的扭矩以使手臂通过一组辅助运动[22]。香港理工大学开发了一种机械臂被称为“移动的exo-神经肌肉骨骼” ,见图10(c),通过应用神经肌肉电刺激收缩肌肉引导外部机械力帮助患者进行所需关节运动[23]。
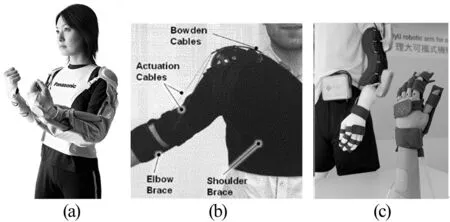
图10 柔性上肢康复机器人Fig.10 Flexible upper limb rehabilitation robot
3 总结与展望
综合目前国内上肢康复机器人的发展状况来看,上肢康复机器人技术在不断的发展和精进。但针对不同类型的上肢康复机器人的研究仍然存在难题和挑战。
末端执行器上肢康复机器人虽然结构简单,更容易制造,但与肢体关节运动学不匹配,难以同时控制多个关节运动,运动范围受限。外骨骼设备虽然能够提供更多的自由度,有助于在更自然和更大的工作空间中整合ADL活动,但如果设备不适当地应用于患者,外骨骼也可能导致生物和人造刚性关节之间的不对准,造成危险。关节旋转中心的变化,解剖轴的对齐以及不同手臂长度的调整都是外骨骼康复机器人研究不可避免的难题。外骨骼康复机器人虽然顺应性较好,穿戴较舒适,更为轻便,但没有外部刚性框架,电机和传感器难以安装,功能多样性不足,也不能提供有效的支撑。刚柔并济可能是未来上肢康复机器人的研究方向之一。此外,尽管商用康复机器人变得越来越普遍,但他们的成本仍然较高。而且商业化智能上肢康复机器人体积及重量较大,使用环境受限。开发出轻量级智能设备应用于社区和家庭是我们未来的工作之一。
总之,机器人技术发展正将康复从一对一的人力资源密集型治疗转变为技术驱动。视频游戏、虚拟现实、脑机触觉接口、智能人机交互等激励元素的整合使得康复治疗过程不再枯燥无味。这些技术的进一步发展和革新会使治疗师能够更有效地提供康复服务,并使患者能够更好地获得康复体验。社会需求和政策支持的双重推动会使我国的上肢康复机器人产业进一步发展。未来,康复机器人在我国会成为康复养老的重要一环,低成本装置提供的远程康复也会有效和高效地将康复训练带入到家庭和社区中。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
现代仪器与医疗(2022年4期)2022-10-08
实用手外科杂志(2022年2期)2022-08-31
汽车实用技术(2022年15期)2022-08-19
小哥白尼(野生动物)(2021年12期)2021-03-29
中华养生保健(2021年18期)2021-02-13
新传奇(2019年40期)2019-11-01
汽车维修技师(2019年2期)2019-08-23
轻兵器(2019年5期)2019-06-21
