
飞机相遇模型仿真技术研究
2020-09-23 02:52张爱华
科学技术创新 2020年28期
张爱华
(天府新区通用航空职业学院,四川 眉山610222)
一些中心机场和其他繁忙空域中的飞机密度不断增大,飞机之间的水平间隔和垂直间隔也随之减小,飞机之间出现危险汇聚飞行的情况时有发生。在这些危险的情况中,两机空中相撞问题值得关注。如今,很多国内外的学者都在研究良好的机载防撞系统以保障飞机飞行安全,其中对TCASII 的研究最为广泛[1]。目前,TCAS(Traffic Collision Avoidance System 空中防撞系 统) 系 统 有 四 种 类 型:TCASI、TCASII、TCASIII、TCASIV。TCASIII、TCASIV 停止研发,最新的TCASII 系统为TCASII Version7.1。大型飞机上装有TCASII,而小型机、通用飞机等都无法装上TCASII;TCASII 同时具备交通警戒信息和决策信息,可提供垂直避让信息。在飞机的适用性上,TCASII 无法适用所有的飞机,其功能亦存在问题,无法改善,所以研制新型的空中防撞系统非常必要,常用的两种手段:试飞与仿真;试飞所需成本很高,仿真为最佳手段。建立实验仿真平台,TCASII 为性能对比参照物,验证是否符合性能指标并改进优化。
1 模型建立
避撞算法包含入侵监视、威胁判定、避撞措施选择、协调避撞等,本课题主要建立垂向上避撞模型及其算法,本机在垂直方向上选择爬升、下降避撞措施,避撞前判定两机是否存在威胁,判定是否存在威胁则要实时监控两机飞行状态。
作为仿真平台工具的仿真模型中包含了本课题的一些内容,在其内容上,多出研究其威胁判定条件,避撞措施选择(爬升或下降),协调避撞等内容。
1.1 技术路线
仿真平台——相遇模型的技术路线为:
(1)研究ICAO、DO-185B 相关标准;
(2)根据相关标准对相遇模型进行需求分析;
(3)利用UML 建模,设计算法流程图;
(4)利用MATLAB 编程;
(5)利用乌伯林空难对相遇模型进行验证代码有效性。
1.2 计算方法
图1 为算法计算方法,根据ICAO 对于仿真平台的标准需求分析,已知CPA 点的时刻t=40s,CPA 点时两机的高度、两机水平距离、两机的空速、两机的升降速率、相遇角等基本参数,分为两段得出两机轨迹,1s~40s 的轨迹和40s~50s 的轨迹。

图1 算法计算方法
2 仿真
2.1 CPA 点相对方位角确定
如图5,假设为在水平面上本机与入侵机在CPA 的位置,以本机飞行方向为Y 轴。假设本机与入侵飞机在CPA 点作匀速直线飞行。本机在CPA 点时的航向角C0=0,C1 为目标飞机在CPA 点时的航向角,V1本机在CPA 点时的空速,V2入侵飞机在CPA 点时的空速,LC本机与入侵机在CPA 时的相对距离,θC为本机与入侵机在CPA 时的相对方位角。相遇角β=C1-C0=C1。

图2 水平面上CPA 点本机与入侵机的相对位置

2.2 举例仿真[3]
建立相遇模型,首先需要讨论两机的相遇类型。从垂直面上,根据两机在CPA 点前后是否平飞、机动分为10 种相遇类型,从水平面上,以CPA 点为原点,以CPA 点本机AC1 航向为Y 坐标,根据两机在相遇过程中是否左转、右转、加速、不加速,分为36 种类型[2]。
本文采用其中一个模型:垂直平面上:本机AC1 在CPA 点前后都平飞,高度呈减速上升状态,入侵飞机在CPA 点前后都平飞,高度呈加速下降状态。水平面上:本机作匀速右转运动,入侵机作匀速直线运动。
仿真得出两机在垂直面上以及水平面上的的轨迹,从中分析出:t=6s 时,两机高度差小于1200ft;t>6s,两机高度差<1200ft;t<6s,两机高度差>1200ft;t=3s 时,两机的水平距离为36354ft<36456ft;t>3s 时,两机的水平距离<36456ft;t<3s 时,两机的水平距离>36456ft。
结果为:t=6s 时,两机发出TA;t=21s 时,两机发出RA;t=40s,两机collision。
2.3 验证
利用乌伯林空难对相遇模型进行验证代码有效性。
乌柏林根空难:AC1:巴航2937 号航班154 型客机(俄罗斯首都莫斯科飞往西班牙城市巴塞罗纳);
AC2:DHL611 号航班波音757-200SF 型货机(意大利飞往布鲁塞尔)。仿真如图3 所示。
两机水平方向以1300 公里时速接近,两机水平速度几乎相等,为650 公里每小时,t=1s 时,两机处于同一高度,为35968ft。
t=40s 时,两机相撞,AC1 的高度为34944ft,AC2 的高度为34944ft,两机水平距离为0 海里。AC1 的升降速度为-1335ft/min,AC2 的升降速度为-2394ft/min,相遇角为60°。
t=5s 时,两机相距6.99 海里,AC1 的升降速度为-160ft/min,AC1 开始转弯,左转20°,AC2 的高度为35968ft,AC2 的升降速度为0ft/min。两机同时收到RA。AC2 下降。
t=7s 时,AC1 下降,升降速度-705ft/min。
从表1 和图3 可以分析得出结论:算法得出数据与实际数据相差不大,图形对比相差不大。

表1 两机在[26s,40s]时间区间内的高度差之比较
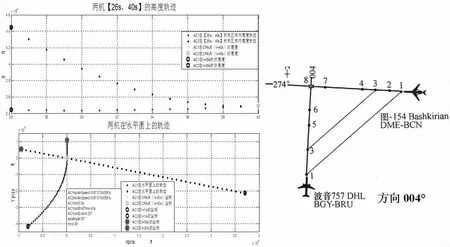
图3 两机在[26,40]时间区间内轨迹与实际轨迹的比较
3 总结与展望
本文在RTCA DO-185A 的基础上,分析了本机与入侵机的相遇情况,确定CPA 点,CPA 点方位角的确定是飞机相遇模型建立的一个重要的部分。利用MATLAB 平台进行仿真分析,得到飞机相遇轨迹,并利用乌柏林根空难验证相遇模型是否正确。研究结果分析说明,相遇模型可以满足碰撞条件。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
世界博览(2019年7期)2019-04-20
小学生导刊(2018年34期)2018-12-18
看历史(2017年8期)2017-08-23
北京航空航天大学学报(2016年7期)2016-11-16
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
