
旋转导弹风洞动态测力试验技术研究
2020-09-21 02:56董金刚金佳林李广良秦永明马汉东
实验流体力学 2020年4期
董金刚, 金佳林, 李广良, 秦永明, 马汉东
(中国航天空气动力技术研究院, 北京 100074)
0 引 言
旋转导弹是指在飞行中绕自身纵轴连续滚转的一类导弹[1]。导弹旋转飞行可以减小各种非对称因素对飞行性能的不利影响,从而简化导弹控制系统[2-5]。经过半个多世纪的发展,旋转导弹已成为导弹武器的重要分支[6-7]。
旋转导弹基本都采用鸭式气动布局和滚转弹体单通道控制模式[2-3,8-9],在飞行时弹体沿纵轴高速旋转,鸭舵作高速动态偏转。国内外研究者对旋转导弹的气动特性进行了大量研究[10-18],结果表明:鸭舵产生的涡流场与弹体、尾翼相互干扰,受弹体旋转运动及舵面动态偏转运动的影响,呈现较强的非定常气动效应,空气动力学特性非常复杂。
20世纪90年代以来,美国NASA及Raytheon公司围绕具体型号开展了一系列旋转导弹动态气动力测量试验研究[19-21]。受风洞试验条件限制,国内仅开展了旋转导弹在简单旋转状态下的静态气动力风洞测量试验,试验对象仅限于单独弹体或简单翼身组合体。
在风洞试验中,需要对导弹的旋转运动进行模拟。对于炮弹类旋转武器,由于长细比较小,试验模型直径较大,模型内部可以安装空气驱动涡轮(转速可达20 000 r/min)[22-23];而对于大长细比导弹,试验模型直径较小,旋转运动主动驱动系统设计较为困难,通常采用模型尾翼斜置安装角的方法,利用气动力使模型自由旋转[24],但该方法存在转速不稳定、不易主动控制等问题。常规风洞静态气动力测量技术无法得到导弹旋转运动引起的非定常气动特性数据,需要研究在风洞中模拟旋转导弹运动特征以及对气动力实现动态测量的试验技术。
本文对大长细比旋转导弹模型旋转运动主动控制技术进行研究,建立旋转导弹动态测力试验技术并对典型鸭式布局旋转导弹进行风洞动态测力试验。
1 试验技术与数据处理方法
1.1 旋转导弹动态测力技术总体方案
旋转导弹动态测力试验系统如图1所示。在旋转导弹试验模型内部安装微型驱动系统(由微型电机和传动轴组成),并与模型进行一体化设计,达到对模型转速进行主动控制的效果。在传动轴与模型连接端,设计安装了模型旋转转速和相位测量装置,可以实时反馈模型转速和旋转相位。采用内式五分量天平、动态数据采集与处理技术对模型动态气动力进行测量。试验流程如图2所示。

图1 试验系统组成图
1.2 大长细比导弹模型旋转运动主动控制技术
在风洞试验中模拟旋转导弹模型的转速,要求斯特劳哈尔数Sr(Strouhal number)相似,Sr=ωl/2v,其中ω为弹体绕体轴的旋转速度,l为飞行器特征长度,v为来流速度。由于风洞中采用缩比模型,所以要求模型转速比实际飞行时更高。受风洞模型弹体直径的限制,大长细比旋转导弹的可控高速旋转存在一定技术难度。常规方法是使用尾翼斜置角,利用弹体自身气动力使模型旋转,其缺点在于试验过程中不能连续稳定控制模型转速,且转速会随迎角和马赫数的改变出现较大波动。
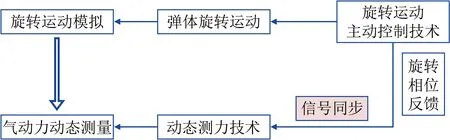
图2 试验流程
主动旋转模型结构以及实物如图3和4所示。模型外形与实际导弹几何相似,模型壁厚在保证刚度的条件下尽量薄,内部安装旋转组件(如图3放大图所示)。微型电机安装于旋转组件内,电机传动轴伸出旋转组件端面与模型连接,另一端与测力天平连接并以支杆固定安装。试验时,以微型电机驱动模型高速旋转,旋转组件固定不转,模型所受气动力通过轴承传递至测力天平。
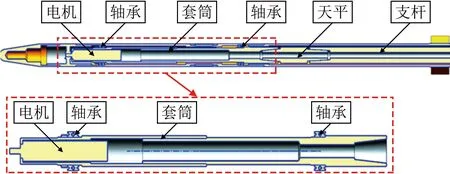
图3 主动旋转模型结构图

图4 导弹模型旋转组件实物图
为确保模型高速旋转时不发生抖动,沿模型轴向设计了2处配重调节位置,方便对模型进行轴向质量分布调节。在模型集成安装完成后,使用动平衡试验台调节动平衡,动平衡精度为7 g·mm。
1.3 测力天平
试验采用五分量环式天平设计方案,如图5所示,中间的环形孔供模型内安装的微型驱动电机走线。为提高天平刚度以适用于动态测量,舍弃了轴向力测量分量。天平各分量设计载荷见表1。

图5 中空五分量环式天平结构图和实物

表1 天平设计载荷Table 1 Design load of balance
1.4 数据采集与处理方法
采用DH5927动态测试信号分析系统对天平气动力进行动态采集。根据模型最大转速(20 Hz)以及每旋转1周需要的采样点(不低于360个),设计采样频率为20 kHz。
试验时,对每个迎角状态下的天平输出信号进行动态采集,根据旋转相位测量装置的数据确定模型的滚转角姿态,从而确定弹体的相位零点。在判断模型滚转角0°的起始时刻后,截取2 s左右的整数个旋转周期的数据(例如,弹体转速5 Hz时的有效数据为10个弹体旋转周期,15 Hz时则为30个弹体旋转周期),再依次对动态试验数据进行频谱分析和滤波处理。
以模型已经稳定旋转而风洞尚未启动时的天平数据作为天平空载基准点,用采集的2 s左右的天平信号数据的数学平均值作为天平信号零点,将各迎角的天平信号数据减去天平信号零点,通过天平地面静校给出的天平公式矩阵计算得到对应的各个时刻的天平载荷量,并结合风洞测量得到的各个迎角下的气流参数,获得相应的气动力系数和力矩系数。
将得到的动态气动力系数与力矩系数进行周期平均处理:
式中,φ为弹体滚转角,CN,exp(φ)、CC,exp(φ)、Cl,exp(φ)分别为试验中法向力系数、侧向力系数、滚转力矩系数随φ变化的动态数据。
2 风洞试验
2.1 试验风洞与模型
试验在中国航天空气动力技术研究院的FD-12风洞中开展。风洞试验段横截面尺寸为1.2 m×1.2 m,试验马赫数为Ma=2.0。
试验模型为典型鸭式布局旋转导弹模型(如图6所示),模型长度为1000 mm,直径为50 mm,长细比为20。试验中模型的旋转方向为顺航向逆时针旋转。

图6 典型鸭式布局旋转导弹模型
将模型与天平系统安装于风洞中,使用皮锤敲击弹身(天平校心附近),使试验系统进行强迫振动。采集天平的动态信号,分析试验系统的固有频率,可以得到模型与天平系统固有频率为41 Hz,结果如图7所示。

图7 模型与天平系统固有频率测试结果
2.2 模型旋转运动试验结果
图8给出了采用旋转运动主动控制技术与气动力驱动技术得到的旋转导弹风洞试验模型转速对比。可以看出:主动控制技术可以得到稳定的转速,转速可调;而利用气动力驱动(采用尾翼斜置方法)模型旋转时,转速不稳定。大长细比导弹模型旋转运动主动控制技术通过采用微型电机驱动模型旋转,可以按照相似参数的要求对转速进行模拟,并可根据要求进行控制,且转速连续可调,转速可以达到20 Hz。

图8 模型转速ω随迎角α变化的对比曲线
2.3 旋转运动状态下的动态测力试验结果
图9为旋转导弹模型旋转运动状态下的动态气动力风洞试验结果。试验中控制模型稳定旋转,转速为14 Hz,得到不同迎角下旋转导弹气动力系数与力矩系数随滚转角变化的曲线,可以看出:导弹模型旋转360°,法向力系数随滚转角呈现双周期的变化规律,数据规律性良好;侧向力系数与滚转力矩系数规律不明显。
2.4 动态数据周期平均结果分析
采用周期平均处理方法对得到的动态试验数据进行处理。图10为周期平均处理后的试验结果重复性对比(导弹鸭舵固定为0°、弹体以14 Hz的转速旋转),图10(a)~(c)分别为导弹法向力系数、侧向力系数和滚转力矩系数的处理结果,可以看出数据重复性精度良好。
图11为周期平均处理后的不同转速下的试验数据对比(导弹鸭舵固定为0°)。可以看出:转速对模型法向力系数影响不大;导弹侧向力系数呈现随迎角增大而增大的趋势,在特定迎角出现拐折,这一现象主要是由于导弹旋转过程中出现的鸭舵涡与尾翼互相干扰引起的;由于本文中导弹旋转转速较低,马格努斯力较小,所以试验得到的侧向力系数随转速变化规律不明显;转速对滚转力矩系数影响较大,弹体旋转运动后,试验系统得到的滚转力矩中包含滚转阻尼力矩,而滚转阻尼力矩主要受转速的影响。上述数据规律与文献[14-18]在FM-3标模动态气动特性研究中得到的规律一致。

图9 典型旋转导弹动态气动力试验结果

图10 周期平均处理后的试验结果重复性对比
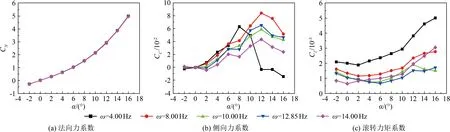
图11 周期平均处理后的模型不同转速下的试验数据对比
3 结 论
针对旋转导弹设计中对地面模拟旋转运动以及动态气动力测量的需求,开展了旋转导弹风洞动态测力试验技术的研究,研究结果表明:
(1) 在1.2 m量级的超声速风洞中,采用微型驱动系统,旋转运动组件与模型进行一体化设计,可以对大长细比导弹模型旋转运动进行主动控制,转速稳定并可连续调节。
(2) 采用环形五分量天平以及动态数据采集与处理技术,对旋转导弹动态气动力进行了测量,导弹模型旋转360°,法向力系数随滚转角呈现双周期的变化规律,数据规律性良好。
(3) 对试验数据进行周期平均处理,数据重复性精度良好,导弹转速对纵向气动力影响较小。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
应用数学和力学(2022年1期)2022-02-18
军民两用技术与产品(2021年8期)2021-11-24
兵工学报(2021年6期)2021-07-29
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
环球飞行(2020年11期)2020-01-11
数学大王·中高年级(2018年11期)2018-12-17
