
空间目标态势行为与事件本体设计与构建
2020-09-14 07:48卢万杰蓝朝桢
宇航学报 2020年8期
卢万杰,徐 青,蓝朝桢,吕 亮
(战略支援部队信息工程大学地理空间信息学院,郑州 450052)
0 引 言
太空已经成为世界各国争相抢夺的战略资源。在开发和利用太空的过程中,各种自然和人为的空间事件导致太空环境变得日趋复杂[1]。为维护我国空间利益,保证航天器的安全,需要加强对空间目标面临威胁的分析,并指导空间目标规避威胁。通过威胁分析,如碰撞预警[1-3],能够对空间目标受威胁的程度进行评估,但无法对空间目标的下一步活动做出指导,实现对威胁因素的规避。同时,由于空间环境的动态性、不确定性和不可控性,需要采用知识推理的方法指导航天器完成新的任务[4]。为此,需要收集并分析各类空间事件的相关信息,对空间目标的行为和事件进行良好的知识建模、表示和推理[5],并根据结果指导空间活动。本体作为对某一领域概念的一套规则的清晰的描述[6],能够以形式化的方式构建现实世界中的实体及其相互关系,并实现人机之间以及机器之间的交流。本体为空间目标的行为执行和事件分析提供决策知识基础,不同国家和学者对此开展了广泛的研究。
文献[7]评估了态势感知领域中的部分本体,分析了缺少的特性,促进了对态势感知相关概念的理解;Rovetto等提出了应用于空间态势感知领域的本体架构[8-10],对空间目标态势感知数据的共享和管理进行了深入而广泛的研究[11-13],并以欧洲空间态势感知项目为例对本体的应用进行了说明[14];文献[15]基于本体构建了支持空间领域数据融合、使用和分享的系统。除了将本体应用于空间态势感知领域的数据处理、集成、共享与管理等方面外,文献[16]构建了基于本体的空间目标应用框架,以可计算的方式对空间目标的设计规范、组件能力、轨道参数等特征进行描述;文献[17]使用机器学习和基于贝叶斯网络的本体构建了识别空间目标行为的端到端方法,该方法中本体主要用于定义和获取领域知识。
空间目标态势领域的行为和事件通常发生在复杂的时空背景下,需要构建统一时空框架下的行为、事件及其关系的组织模型,然而上述相关研究主要集中于本体在空间目标数据的集成、管理、共享等方面,缺乏对空间目标行为执行、突发事件预警等领域的研究,并且没有对空间目标在受到威胁后的进一步活动做出规划和指导。为此,本文设计并构建了面向行为和事件的空间目标态势本体模型。通过建立空间目标属性、行为和事件之间的语义、空间和时间关系模型,将空间目标态势的行为和事件描述为统一时空框架下具有内在联系的连续执行的过程,实现统一时空框架下空间目标行为执行和事件发生过程的动态推演,并以空间目标碰撞预警事件为例对构建的本体模型进行了验证。
1 空间目标事件与行为本体建模
本体被广泛引用的定义是由Gruber[18]提出的“本体是概念模型的明确的规范说明”,其使用复杂和丰富的语义关系描述各种资源之间的联系,并构建机器可理解的语义。鉴于空间目标态势领域的时空特性和复杂性,为了能够在统一时空环境下反映资源的动态变化过程,顾及空间目标态势领域数据共享和本体集成,本文选取基本形式本体(Basic formal ontology,BFO)作为上位本体。
BFO[19]是一个服务于科学领域数据检索、分析与集成的顶层本体,通过在同一框架内从三维和四维角度对事物进行划分,得以表征出事物的静态与动态、时间与空间特征,满足空间目标态势复杂的时空特性。基于BFO,本文对空间目标态势的行为和事件的概念、关系等因素进行梳理和扩展,构建的面向行为和事件的空间目标态势本体(Behavior-and-event-oriented space object situation ontology,BEO-SO2)可以描述为五元组:
MBEO-SO2=O,Re,T,S,Ru
(1)
式中:MBEO-SO2为BEO-SO2本体模型,O=Oe,Oc,Oa为各种对象类要素及其属性的集合,Oe表示对象实体,包括空间目标、参与组织机构、其他目标等执行动作的主体和接受动作的客体,Oc表示Oe的行为和事件的集合,包括变化过程,Oa表示Oe和Oc的属性集合。Re表示Oe在统一时空框架内执行行为与发生事件的过程中的关系集合,分为语义关系、空间关系和时间关系。T和S要素分别表示O和Re要素发生的时间与地点。其中,T分为时间段和时间点要素,S表示行为和事件执行的场所及环境,本文中指地球表面及向上延伸到太空的区域;Ru表示推理规则,包括行为执行和事件发生的条件、行为与事件相互影响的规则、行为执行和事件发生后各种要素的变化规则等内容。
1.1 BEO-SO2模型构建
通过对空间目标行为和事件的分析,本文获取BEO-SO2模型需要具备的相关概念,并基于BFO等相关本体构建了BEO-SO2模型,如图1所示。BEO-SO2模型中主要包括实体要素、属性要素、行为要素、事件要素和时空要素,具体内容如下所述。
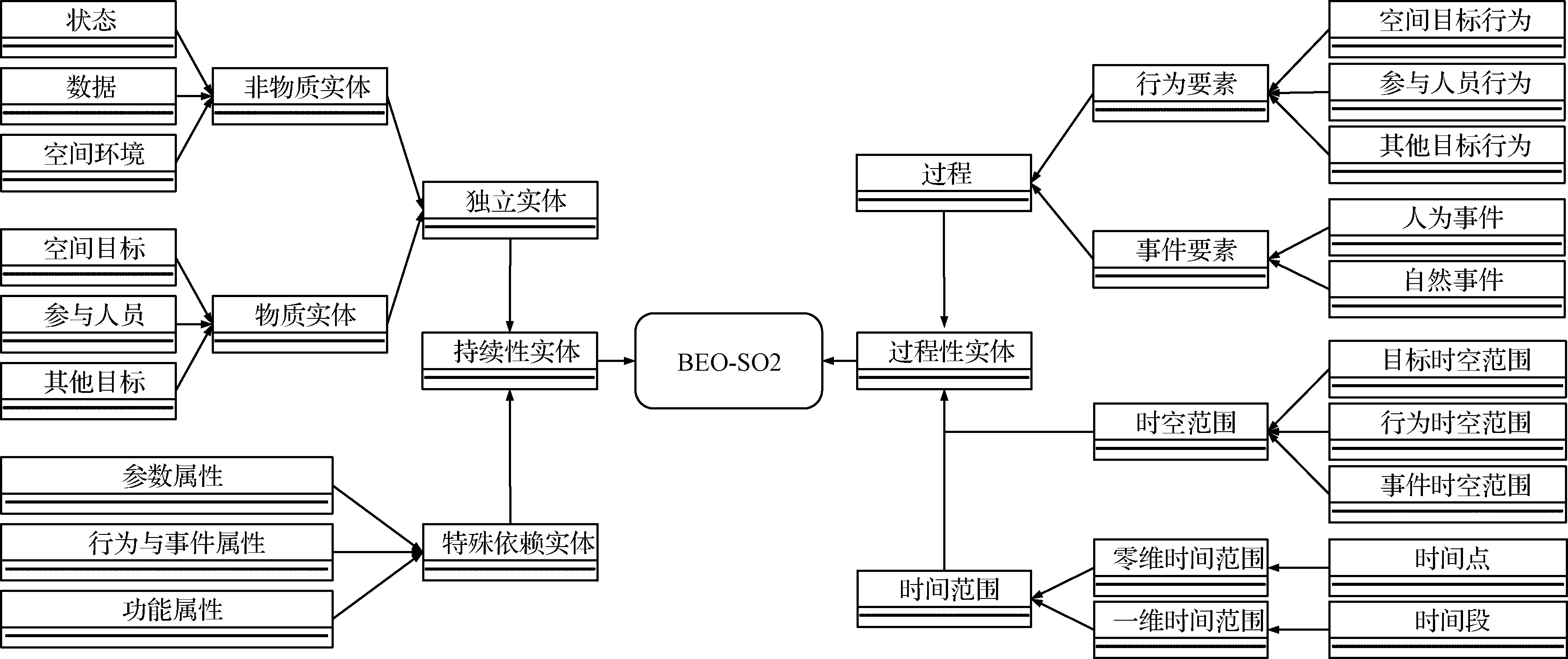
图1 BEO-SO2模型UML图
1) BEO-SO2实体要素
实体要素是BEO-SO2模型中与行为和事件有关的各种实体集合,分为物质对象实体集合和非物质对象实体集合。物质对象实体集合继承自BFO中的物质实体,是空间目标态势中各种行为和事件的主要参与者,包括空间目标(如卫星、空间碎片)、参与人员(如决策制定者)等;非物质实体集合继承自BFO中的非物质实体,主要包括空间目标的状态(如空间站运行状态)、产生和获取的各种数据(如导航信号)以及行为和事件发生时所处的空间环境。
2) BEO-SO2属性要素
属性要素描述各类空间目标及其行为和事件,提供对空间目标及其行为和事件的描述数据,可以分为两类。第一类是实体要素的参数和功能属性。其中,参数属性用于描述目标的属性信息,并进一步用于分析计算;功能属性可以对目标能力进行识别。以人造地球卫星为例,当功能属性为地球遥感成像时,可确定其具有对地观测并获取影像的能力;通过参数属性,如识别信息、成像传感器参数,可以获取该人造地球卫星的名称等信息,并利用成像传感器参数计算对地观测的应用效能,如对某地面目标成像的时间窗口信息。第二类是实体要素的行为和事件属性,用于描述空间目标行为与事件的信息,如空间碎片对在轨运行卫星碰撞威胁的等级。
3) BEO-SO2行为要素
行为要素是指与空间目标任务有关的行为动作,包括空间目标行为、参与人员行为和其他目标行为。行为要素可以是单一行为,如卫星发动机点火,也可以是不同行为的组合,如卫星为到达预定轨道,需要执行太阳帆板展开、发动机点火、变轨、调姿等一系列动作。行为要素能够指导空间目标执行复杂的动作,为各类空间目标执行任务提供语义和流程上的支持。
4) BEO-SO2事件要素
事件是实体要素发生变化的原因,由一系列行为动作组成,是实体要素沿时间轴执行的多个行为的集合。事件要素可以分为人为事件和自然事件。人为事件主要指由于事件参与者的指令而产生的事件,是事件要素的主要组成部分,也是BEO-SO2模型关注的重点,包括友好事件(如空间站救援)、中立事件(如气象卫星观测)和敌对事件(如信号干扰)。自然事件主要指由于空间环境或者目标自身原因而导致的事件,如太空的复杂电磁环境对卫星器件的损害、卫星寿命结束后的陨落。
5) BEO-SO2时空要素
时空要素继承自BFO中的时空范围,表示空间目标及其行为和事件所处的空间与时间范围信息,主要包括目标时空范围、行为时空范围和事件时空范围。时空要素具有空间三维坐标和时间属性,如卫星在轨活动的时空范围、碰撞事件发生的时空范围。时空要素中的时间要素包括时间点和时间段,继承自BFO中的时间范围。例如,卫星发生碰撞的时刻是时间点,而卫星执行变轨行为的时间范围是时间段。时空要素能够对目标行为和事件发生的时间和地点做出明确的描述。
1.2 BEO-SO2关系模型构建
在BEO-SO2模型中,关系模型描述了实体、属性、行为和事件之间的相互关系,具有至关重要的作用,主要包括语义关系、空间关系和时间关系。
1.2.1BEO-SO2语义关系
语义关系用于描述概念与概念、概念与实例以及实例与实例之间的关系。基于部分与整体关系的分类法[20],结合空间目标态势领域的概念与知识,BEO-SO2模型使用资源描述框架(Resource description framework,RDF)将语义关系描述为三元组结构<主语,谓语,宾语>,其中部分语义关系如表1所示。
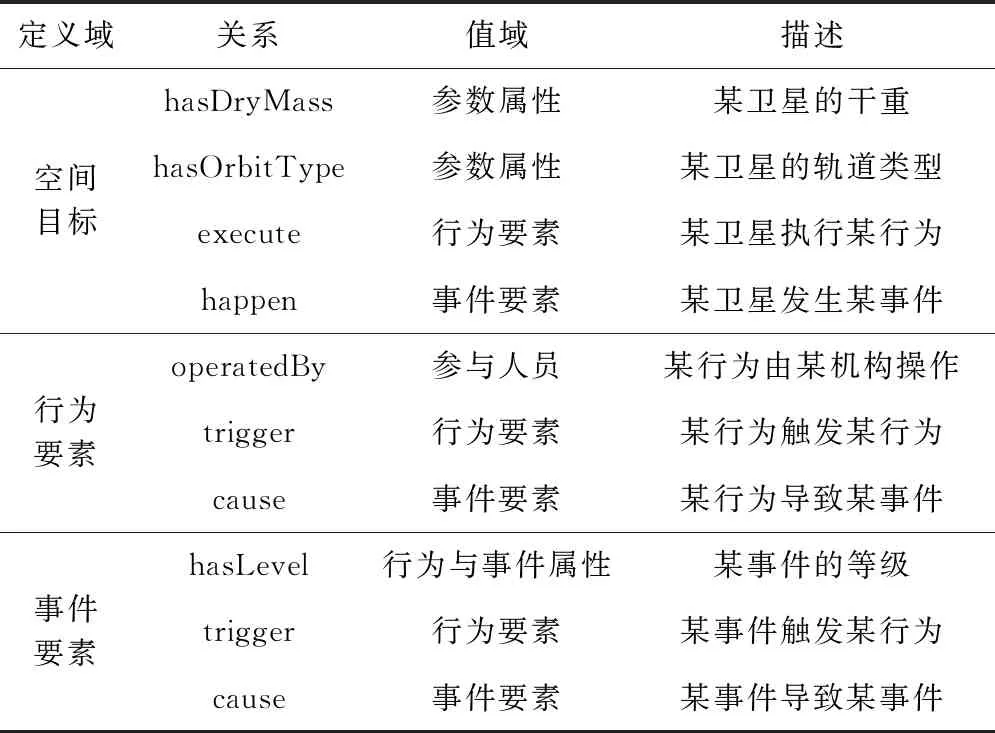
表1 BEO-SO2模型中语义关系(部分)
1.2.2BEO-SO2空间关系
BEO-SO2模型中空间目标的空间关系包括三维空间下的拓扑关系、方向关系和距离关系,三种空间关系之间相互关联又相互制约。
三维空间拓扑关系利用区域连接演算(Region connection calculus,RCC)中适用于任意维空间的RCC8模型进行描述[21],包括相离、相切、部分相交、相等、正切真部分、非正切真部分、反正切真部分和反非正切真部分,如图2所示。
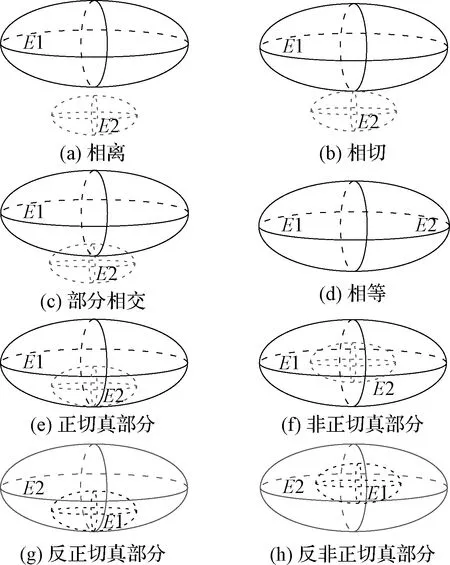
图2 BEO-SO2空间拓扑关系
三维空间方向关系使用较多的是3DR27模型,其基于东南西北方位构建出包括目标中心在内的27个方向[21]。然而,BEO-SO2目标实体位于太空中,不具备东南西北四个方向,因此使用上、下、左、右、前、后6个方位来表示空间目标之间的相对方向。由于空间目标之间的相对位置不包括中心方位,因此BEO-SO2模型中方向关系共包括26个方向区域,称为BEO-SO2-3DR26方向模型。本文构建空间目标本体坐标系,并使用相对方位角和俯仰角对26个方向区域进行量化。以卫星和空间碎片为案例进行说明,如图3所示。图3中,空间目标本体坐标系以卫星的质心O为原点,Z轴为质心O与地心连线并且背离地心为正,由于卫星轨道存在椭圆,因此Y轴由卫星运动方向与Z轴根据右手定则得到,X轴由Z轴与Y轴根据右手定则得到。OD为卫星指向空间碎片的矢量在XOY面上的投影。方位角A定义为从X轴正方向起,依顺时针方向与OD的夹角,范围为0°~360°;俯仰角P定义为卫星指向空间碎片的矢量与XOY面的夹角,沿Z轴指向一侧为正,另一侧为负,范围为-90°~90°。
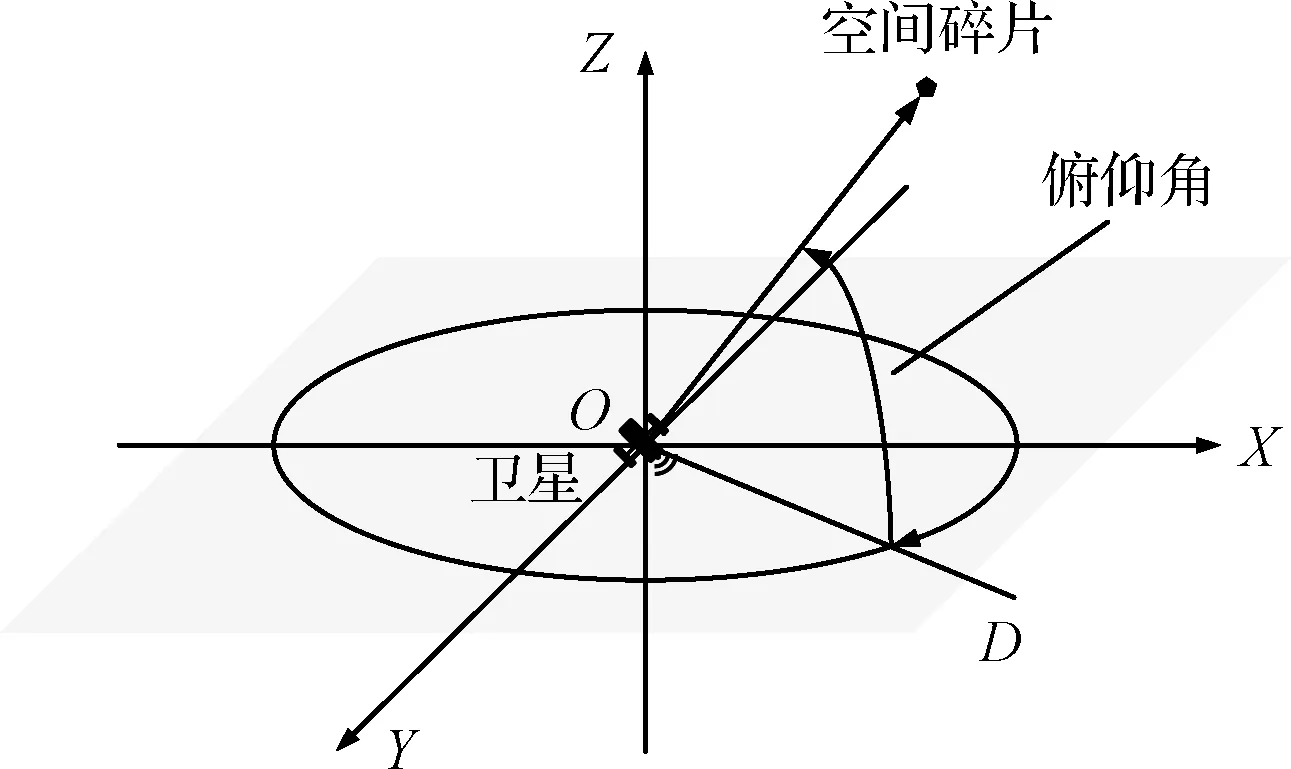
图3 空间目标间方位角与高度角定义
定义X轴正方向和反方向分别表示卫星的前和后方向,Y轴正方向和反方向分别表示卫星的右和左方向,Z轴正方向和反方向分别表示卫星的上和下方向,如图4所示,则BEO-SO2-3DR26方向模型中26个方向区域使用方位角A和俯仰角P的量化定义如表2所示。其中,α=22.5°。
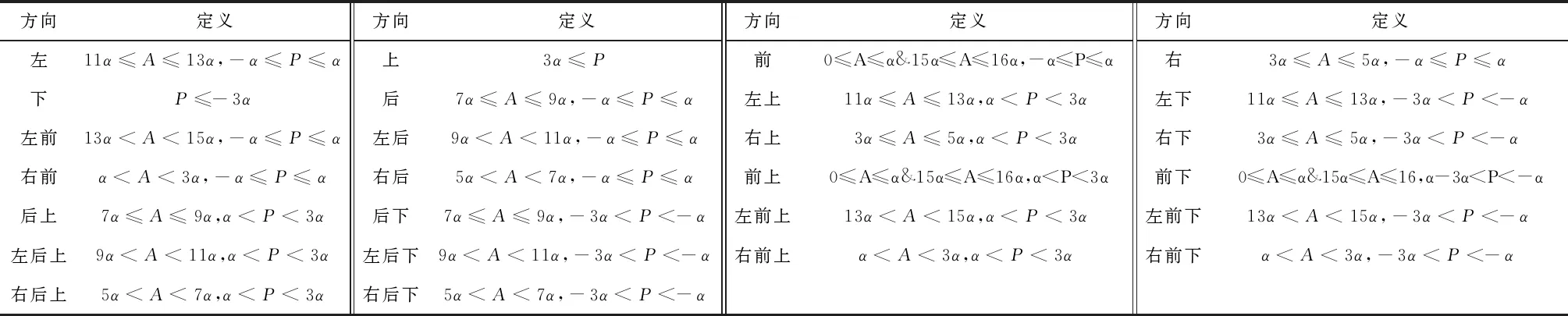
表2 BEO-SO2-3DR26模型方向定义
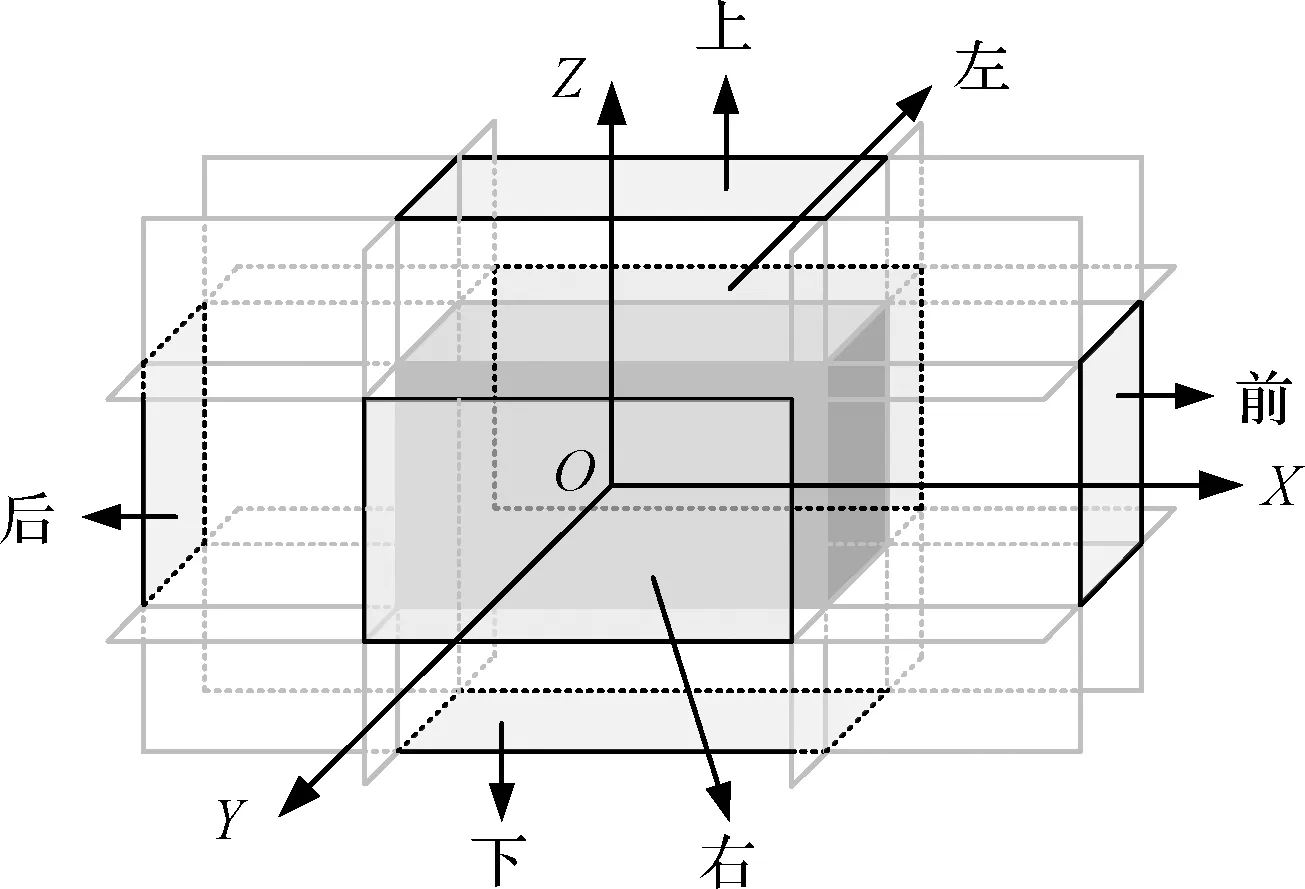
图4 BEO-SO2空间方向关系
三维空间距离关系用于描述空间目标之间的距离,包括定量描述和定性描述两种方式。定量描述指空间目标之间的欧氏距离,使用式(2)获取;定性距离通过给定的阈值对欧式距离进行描述,可以根据式(3)的判定方法获取。
(2)
式中:D表示目标A和目标B之间的距离, (xA,yA,zA)和(xB,yB,zB)分别是目标A和目标B在三维空间中的坐标。
(3)
式中:Dl是对D的定性描述,Ds,Dn和Dt分别是对距离D进行定性界定的距离数值。
1.2.3BEO-SO2时间关系
BEO-SO2时间关系可以为实体要素的行为和事件提供时间参考框架,并且根据时间尺度的不同,分为时间点和时间段。其中,时间点用于描述时间瞬间,如卫星发动机点火的时刻、空间目标碰撞的时刻等;时间段用于描述时间范围,如卫星在轨运行的时间范围、遥感卫星对某地区进行观测的时间窗口。由于时间尺度不同,BEO-SO2模型中的时间关系可以分为时间点关系、时间段关系以及时间点与时间段关系。其中,时间点关系和时间段关系较为成熟[22],可直接用于BEO-SO2模型中。而时间点与时间段的关系并不完善,无法直接用于对BEO-SO2模型中时间点与时间段关系的描述,因此对时间点与时间段关系进行补充,如所表3示。其中,时间段TI开始于时间点t1,结束于时间点t2。
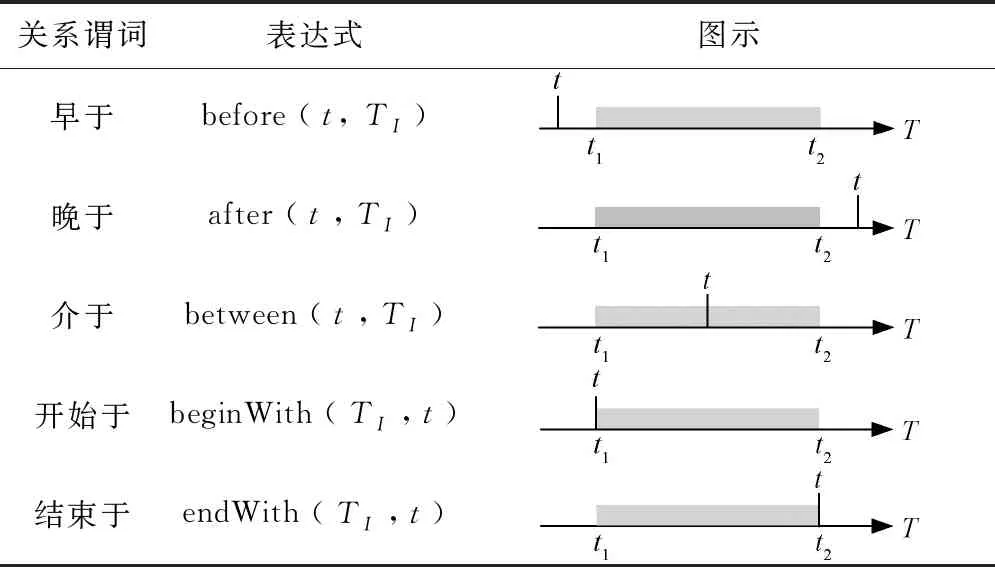
表3 时间点与时间段关系
2 基于BEO-SO2模型的碰撞威胁本体构建
在轨卫星时刻受到各种外部威胁,例如国际标准时间2009年2月10日16时56分左右,美国IRIDIUM 33卫星和俄罗斯报废的COSMOS 2251卫星发生的相撞事件就是典型的案例[23]。因此为保证人造地球卫星在轨正常运行,需要对来自其他空间目标的碰撞威胁进行评估,并在不同威胁等级下指导目标进行操作以保证安全。本文以空间目标碰撞事件预警为例,对BEO-SO2模型的应用进行说明。
2.1 对象实体等级定义
通过定义等级,在构建推理规则时能够区分不同等级的事件,并驱动后续相应行为的执行。以在轨卫星和空间碎片为研究对象,使用卫星重量、空间碎片尺寸和目标间距离为基准来定义空间目标间的碰撞威胁等级。设定受到威胁的目标为主目标,施加威胁的目标为从目标,同时,参考基准暂不考虑速度、体积、材质等因素,相关因素可根据需求自主定义与添加。卫星重量m、空间碎片尺寸s、空间目标间距离d和碰撞威胁等级定义如表4所示,主目标等级、从目标等级、目标间距离等级和从目标对主目标碰撞威胁等级的对应关系如表5所示。
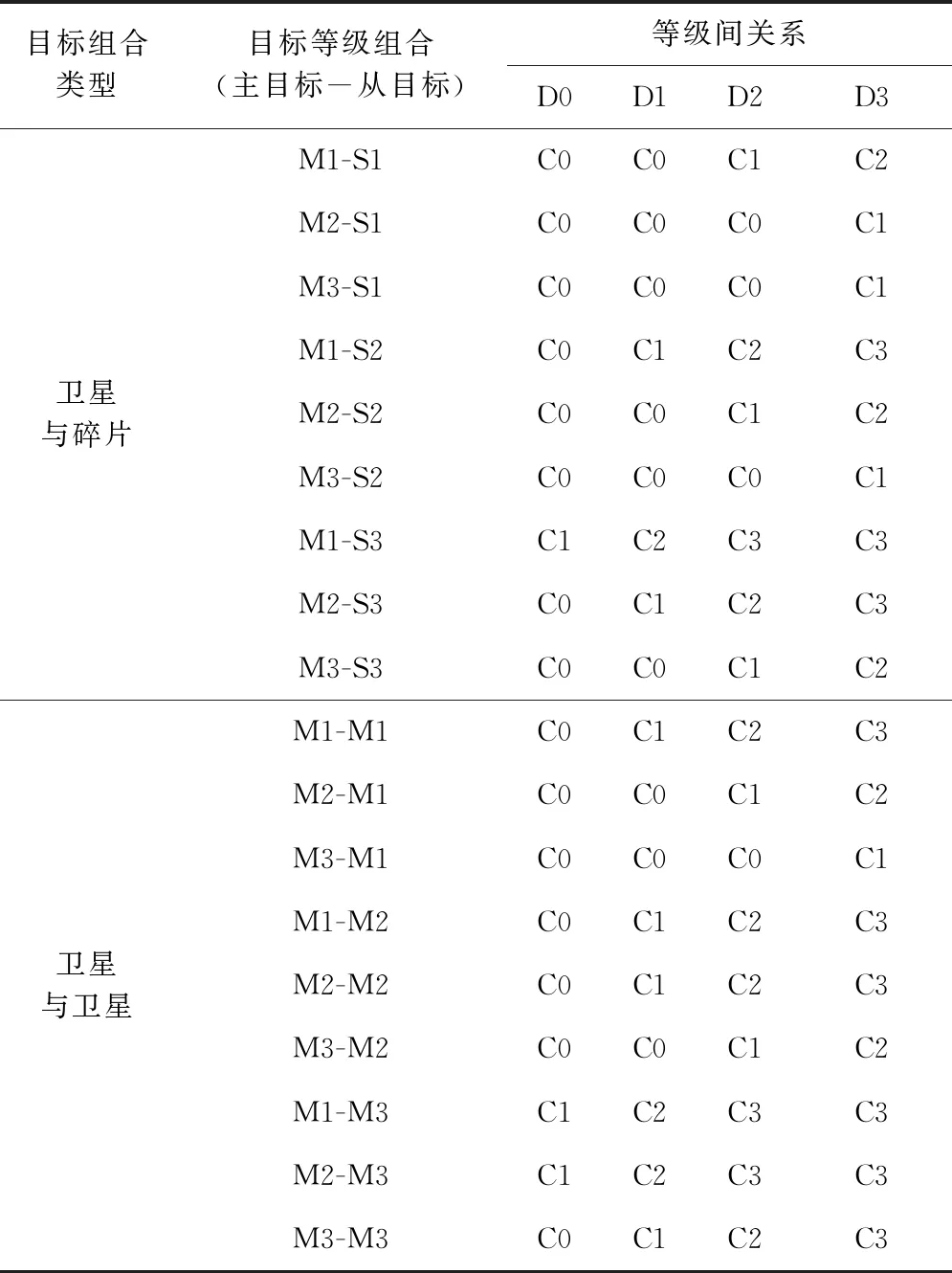
表5 对象等级与碰撞威胁等级关系
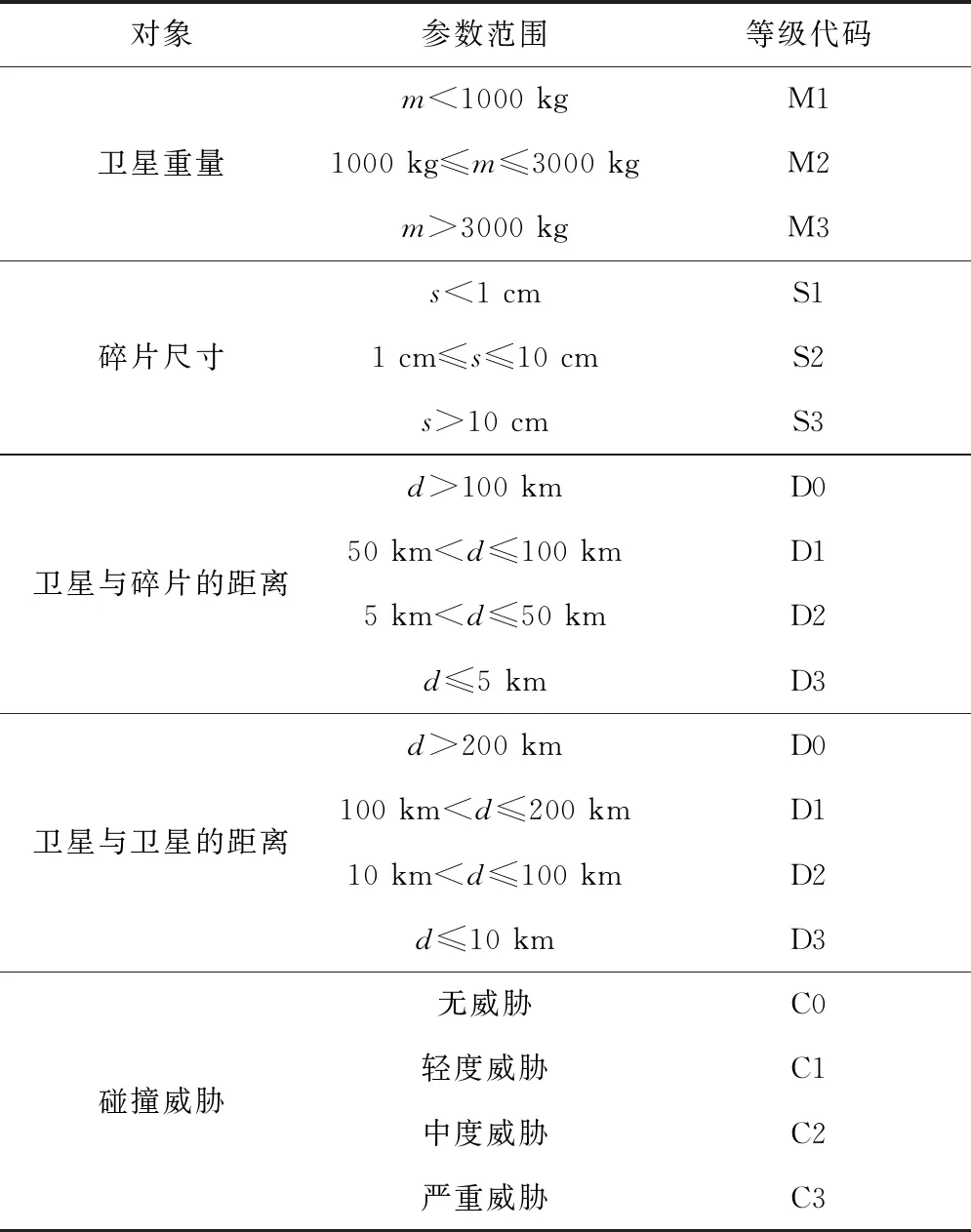
表4 BEO-SO2对象等级定义
2.2 行为与事件要素构建
空间目标需要遵循设定的流程,按照顺序执行相应的行为动作来完成不同的事件。以空间目标碰撞预警为例,将空间目标的行为和事件细分为过程序列,根据不同情况组织动作和事件,对过程单元构建语义并进行编码,如表6所示。

表6 BEO-SO2行为与事件语义关系
2.3 推理规则构建
通过基于规则的推理能够针对不同的情况触发对应的行为和事件。语义网规则语言(Semantic web rule language,SWRL)作为W3C的推荐标准,能够以语义的方式呈现规则。基于网络本体语言(Ontology web language,OWL)构建的本体结合SWRL即可实现本体基于规则的推理。使用SWRL构建的空间目标碰撞事件推理规则如表7所示。
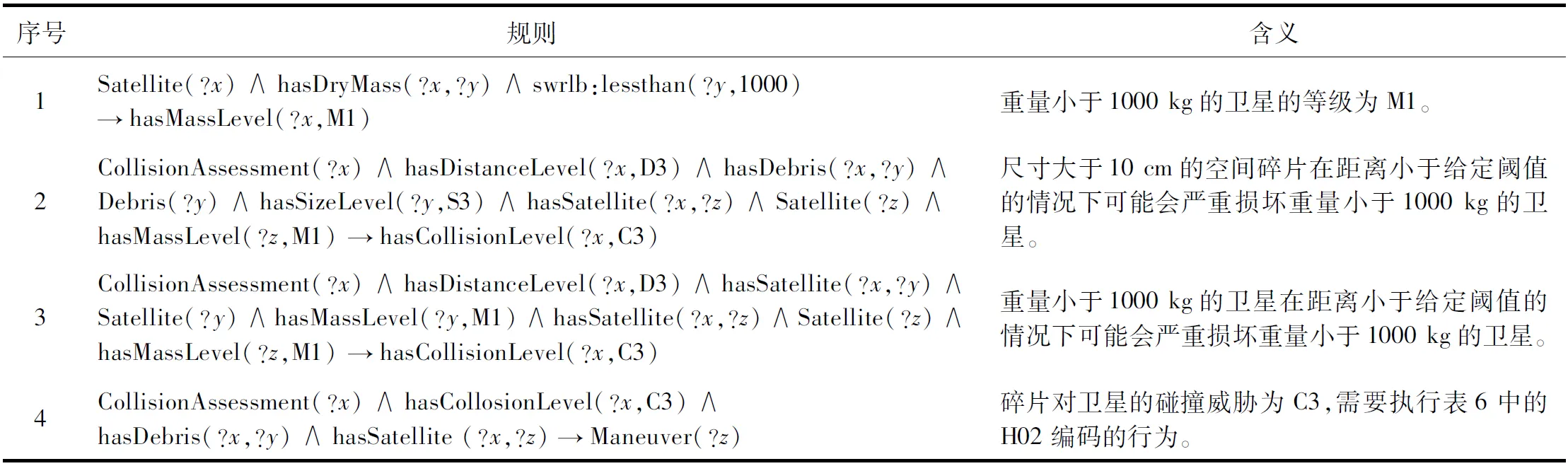
表7 基于SWRL的推理规则
2.4 空间目标碰撞威胁本体实例
依据BEO-SO2模型,本文构建了基于BEO-SO2模型的空间目标碰撞威胁本体实例。如图5所示为空间目标碰撞威胁本体部分实例和关系的展示。
3 仿真校验与分析
BEO-SO2模型能够对空间目标态势中各种行为和事件之间的影响进行推理,提高用户对空间目标行为和事件的认知能力。为测试BEO-SO2模型,本文构建了基于B/S模式的验证平台,利用基于Web语义化框架Apache Jena的接口集成了BEO-SO2本体文件,并使用地理空间三维制图与虚拟地球平台Cesium对测试结果进行可视化展示。
碰撞威胁等级推理的测试数据包括两组:数据组合01为空间碎片CZ- 4B DEB和IRIDIUM 44卫星,数据组合02为COSMOS 2251卫星与IRIDIUM 33卫星,如表8所示。其中,本文所述时间如无特殊说明,均为国际标准时间。表8中时间范围表示碰撞威胁计算的时间范围,计算精度1000 ms表示每1000 ms计算一次空间目标位置。通过空间碎片的尺寸和卫星的重量获取对应的等级。利用表4和表5中的等级关系,获取人造地球卫星等级、空间碎片等级和时间变化下的距离等级,并通过BEO-SO2模型和表7中的规则,推理出不同时空背景下空间目标之间的威胁等级。
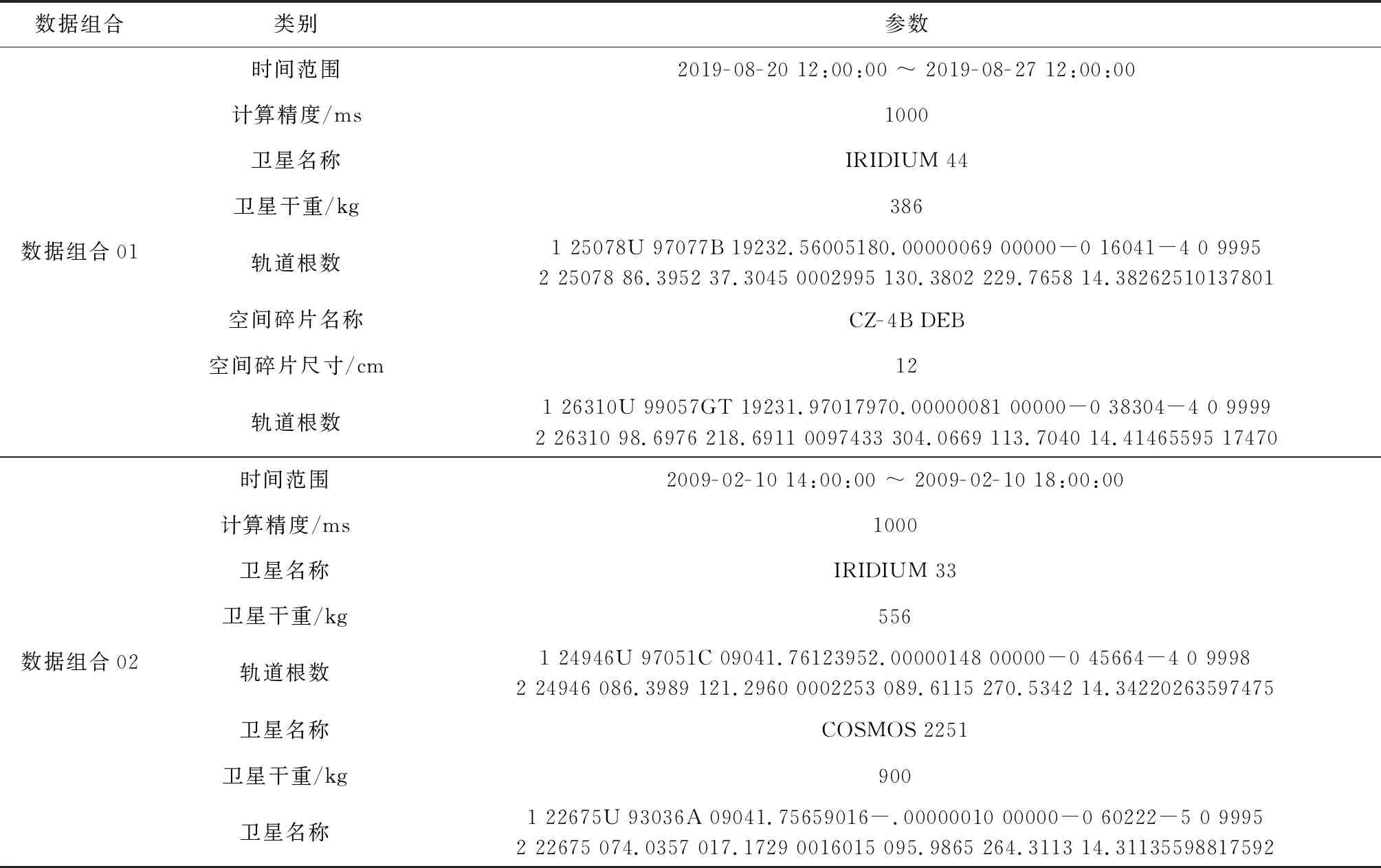
表8 测试数据
图6所示为空间碎片CZ- 4B DEB对卫星IRIDIUM 44的碰撞威胁推理过程,其中人造地球卫星等级和空间碎片等级分别为M1和S3。图6(a)和图6(b)场景中威胁等级分别为C1和C3,可以看出在2019年8月21日18时29分38秒空间碎片CZ- 4B DEB对卫星IRIDIUM 44存在较大的碰撞威胁。
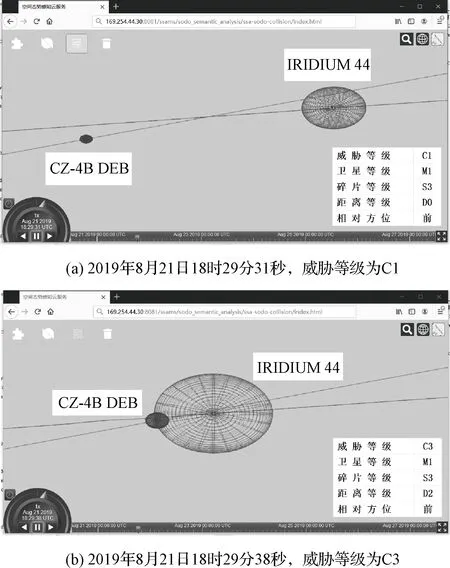
图6 空间碎片CZ- 4B DEB对卫星IRIDIUM 44的威胁程度推理
图7所示为卫星COSMOS 2251对IRIDIUM 33的碰撞威胁推理结果。其中,图7(a)场景的时间为2009年2月10日16时55分52秒,此时,COSMOS 2251与IRIDIUM 33之间的距离等级为D2,小于100 km,COSMOS 2251对IRIDIUM 33的威胁等级为C2,已经构成了一定程度的威胁。图7(b)中,在2009年2月10日16时55分59秒,COSMOS 2251与IRIDIUM 33之间的距离等级为D3,小于10 km,距离较近,威胁等级为C3,表明COSMOS 2251对IRIDIUM 33构成严重威胁,并在一段时间后发生碰撞,与实际碰撞事件较为吻合,表明了推理结果的正确性。
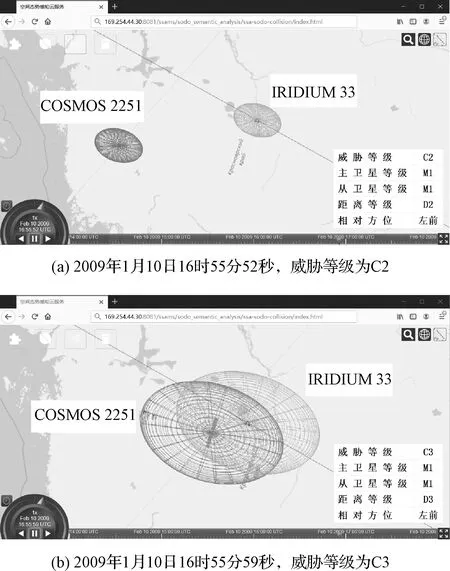
图7 卫星COSMOS 2251对IRIDIUM 33的威胁程度推理
4 结论与展望
BEO-SO2模型能够在统一时空框架下集成空间目标的属性、行为和事件信息,基于该模型,相关领域和专业人员能够实现空间目标行为与事件影响等级的智能分析。
然而BEO-SO2模型仍旧存在有待改进的方面。首先,BEO-SO2模型中包括的目标类别分类不够精细,需要进行细分和扩充。其次,需要构建本体与数据库的映射关系,为基于本体的推理提供更加丰富的数据。最后,BEO-SO2模型主要依靠人工进行构建,需要研究并借鉴本体自动与半自动构建方法来完善。除此之外,在BEO-SO2模型基础上,拟结合知识图谱技术,为用户提供空间目标态势语义知识,实现对航天活动的有力保障。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
齐鲁艺苑(2022年1期)2022-04-19
哈哈画报(2021年10期)2021-02-28
红领巾·探索(2020年5期)2020-05-19
作文大王·低年级(2018年10期)2018-12-06
小猕猴智力画刊(2016年8期)2016-05-14
小猕猴智力画刊(2016年5期)2016-05-14
文理导航·科普童话(2015年6期)2015-07-29
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21
