新工科下的“理虚实一体化”《焊接机器人》课程教学改革探索
2020-09-10 12:45:51陈宇肖逸锋李湘文
电焊机 2020年12期
陈宇 肖逸锋 李湘文
摘要:基于焊接新工科模式下新的人才培养目标,文中通过研究《焊接机器人》课程新方向、新模块的特点,更新教学内容,重构课程体系,建立项目式任务驱动的“理虚实一体化”新工科教学体系,将理论学习、虚拟仿真和实践操作相互促进,融为一体,真正做到在学中做、做中学,提高学生的实践能力与创新能力,实现多元化、创新型卓越工程人才培养的目标。
关键词:新工科;理虚实一体化;焊接机器人
中图分类号:G642 文献标志码:B 文章编号:1001-2303(2020)12-0104-
DOI:10.7512/j.issn.1001-2303.2020.12.22
0 前言
焊接机器人已广泛应用于汽车、航天、船舶、机械加工、电子电气、食品加工及其他诸多相关制造领域中,并作为先进制造业中不可替代的重要装备和手段,成为衡量一个国家制造水平和科技水平的重要标志之一[1-2]。焊接机器人在各国工业机器人应用比例中占25%~50%,实现焊接产品的自动化、柔性化与智能化已成为发展趋势[1-4]。
新工科是在新科技革命、新产业革命、新经济背景下工程教育改革的重大战略选择,紧紧围绕工程教育改革的新理念、新结构、新模式、新质量、新体系全面开展。其内涵是以立德树人为引领,以应对变化、塑造未来为建设理念,以继承与创新、交叉与融合、协调与共享为主要途径,培养未来多元化、创新型卓越工程人才[5-6]。这使得传统的焊接技术人才面临着严峻挑战,但同时也为焊接技术人才的革新带来了良好的机遇[7]。我国许多高校焊接专业纷纷建设了焊接机器人实验室,强化学生对焊接机器人技术的认识和实践,巩固所学基础理论知识,提高学生创新能力和综合素质。同时各高校教师针对《焊接机器人》课程的教学进行了大量的尝试,文中在对当前《焊接机器人》课程教学存在的问题充分分析的基础上设计出“理虚实一体化”新工科教学体系,更新教学内容,重构课程体系,以期对《焊接机器人》课程的教学质量起到积极的效果。
1 《焊接机器人》课程教学现状
1.1 教学内容难度过高
《焊接机器人》是一门多学科交叉融合的课程,涉及机械、数学建模、电工、语言编程等综合知识,学生需要积累多门课程的理論知识及丰富的设备实践操作经验才能应对机器人焊接生产中碰到的各种状[8-9]。而传统人才培养方案对学生的交叉学科融合信息能力重视不够,且焊接机器人方面的教学资源匮乏,学生对知识的理解和实操的掌握程度较低,难以形成相应的基础知识框架,可能会适得其反。
1.2 教学方法过于陈旧
由于我国的机器人教育起步较晚,教学资源相对滞后,可供查阅的专业资料有限,师资力量薄弱,很多学校的教学采用的是传统的演示性教学,重理论、轻实践。虽能够让学生获取对焊接机器人应用的感性认识,但无法实现对相关知识在实践中的应用。“理论+实操”的分段式教学已不适合新工科背景下《焊接机器人》课程的教学。
1.3 教学设备昂贵
焊接机器人工作站价格昂贵,一套工作站价格在三十万元左右,焊接机器人在线编程需要每位学生一台机器人进行操作编程与示教,对实验室场地的水电要求非常高及资金投入很大。一般高校考虑设备使用率及价值情况,购买的设备台套数远远不能满足学生正常的使用需求。我院依托焊接机器人与应用技术湖南省重点实验室购置了日本松下TM1400,ABB,库卡、埃斯顿等品牌机器人用于教学科研,但由于数量少,且各品牌机器人操作方式不同,在实际教学应用中难以满足学生使用需求。随着《中国制造2025》的实施,机器人技术及应用迎来了飞速发展,机器人仿真技术及离线编程技术日渐成熟,部分知名机器人厂家都开发出相应的离线编程软件,在一般电脑上就可以进行各种焊接机器人仿真编程应用及虚拟软件的开发,提高了学生对新技术的学习兴趣,为焊接机器人教学理实一体化奠定了基础。
2 《焊接机器人》课程理虚实一体化体系构建
2.1 新工科下理虚实一体化理念
新工科背景下为了实现新的人才培养目标,需要新的思维、新体制机制、 全面创新工科(程)教育,培养创新人才,引领发展。基于应对变化、塑造未来、主动变革的新理念,各高校都在积极探索新的教学模式,随着互联网、大数据、人工智能等新科技的快速发展,理虚实一体化的教学模式在工科专业中成为热点趋势[10-11]。理虚实一体化教学不仅可以充分发挥教师的主导作用,还可以突出学生的学习主体地位。理论知识、虚拟操作和实践操作交替进行是实中有理,理中有实。理虚实一体化教学能够让学生“动”起来,主动学习,提升能力,是一种突出学生动手能力和专业技能的培养,充分调动和激发学生学习兴趣的教学方法。在理虚实一体化教学中,教师可以通过教学任务和教学目标的设定,在教师的“教”、学生的“学”中构建职业技能培养框架。同时丰富了课堂的教学实践技能训练,提升了教学质量[12-14]。
《焊接机器人》课程非常适合应用理虚实一体化教学理念,既保留了“理实一体化”教学模式中学生“做中学,学中做”的热情,又有效地解决了硬件设备数量不足、设备损坏率高及课堂教学组织难等教学实际中的诸多难题。
2.2 《焊接机器人》课程理虚实一体化体系构建
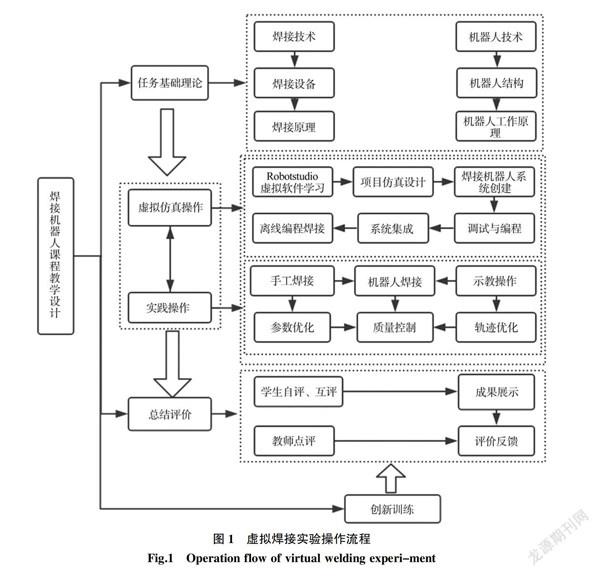
理虚实一体化教学模式框架以理论知识讲授、虚拟软件仿真训练和焊接机器人实验室实践操作的顺序为主线,采用基于生产项目的学习,使教学内容对接企业生产实际,重点突出虚拟软件仿真模拟训练,使学生熟悉操作的全流程,实现理论教学和实践操作的贯通、衔接。在任务实施过程中,学生的仿真操作与实践操作独立完成,通过成果展示进行学生自评、互评,得到反馈总结。具体框架结构如图1所示。
3 《焊接机器人》课程教学改革实施方案
3.1 根据新工科背景下人才培养方案,修订教学大纲
新工科建设形势下对焊接专业课程的教学模式提出了更高的要求,为了实现新的人才培养目标,需要新的思维,新体制机制。因此,修订了《焊接机器人》教学大纲,明确课程教学改革方向,采用项目式任务驱动教学方法引入新模块,在新的人才培养方案中将该课程确定为专业必修课程。要求学生具有以下能力:①应用知识解决复杂工程问题的能力;②针对复杂工程问题的分析、设计、开发、研究能力;③使用现代工具解决复杂工程问题的能力;④团队合作能力与沟通能力;⑤自主学习、终身学习能力。
3.2 依托新工科新理念,更新教学内容,制定课程目标
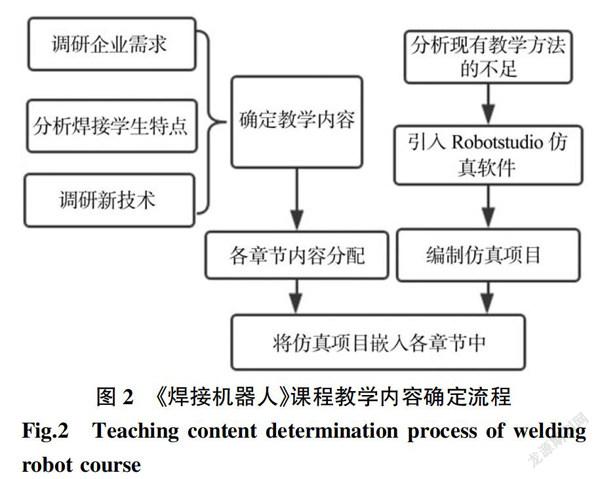
本项目更新教学内容,首先调研企业需求,分析焊接专业学生特点、调研最新技术并结合教材确定教学内容,按学时分配各章教学内容;同时分析现有教学方法的不足,引入Robotstudio仿真软件,编制仿真项目,将仿真项目嵌入各章节中,形成项目式任务驱动教学,重构课程体系,建立焊接新工科模式。实现以学生为中心、OBE教学与评价、质量持续改进。《焊接机器人》课程教学内容确定流程如图2所示。
3.3 明确新工科建设形式,建立项目式“理虚实一体化”教学体系
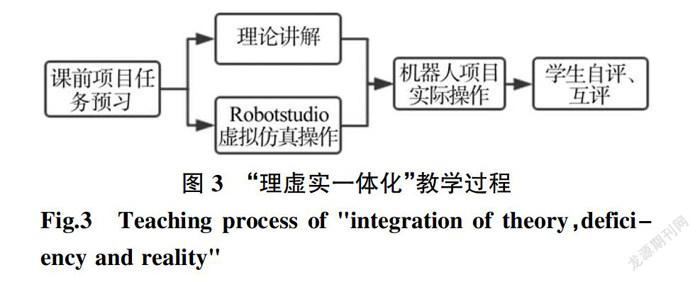
项目式任务驱动“理虚实一体化”教学是以企业项目为背景,在理论教学的同时引入Robotstudio仿真软件进行虚拟仿真操作,以加深知识理解,仿真操作达到要求后进行实践操作,最后进行自评与互评及归纳总结,“理虚实一体化”教学过程如图3所示。
4 结论
在当前“新工科人才”培养思路的启发下,为了更好地应对未来工业4.0以及建设创新型国家对人才的需求,针对《焊接机器人》课程通过建立新方向、新模块,更新教学内容,重构课程体系,建立“理虚实一体化”教学模式,将焊接技术与工业机器人技术紧密结合,理论传授、虚拟编程与实踐操作层层相扣,提升教学效果,改善教学氛围,使学生乐在其中,形成自主学习意识,提高学生的实践能力与创新能力。
参考文献:
[1] 兰虎. 焊接机器人编程及应用[M]. 北京:机械工业出版社,2019.
[2] 许燕玲,林涛,陈善本. 焊接机器人应用现状与研究发展趋势[J]. 金属加工(热加工),2010(8):32-36.
[3] 霍厚志,张号,杜启恒,等. 我国焊接机器人应用现状与技术发展趋势[J]. 焊管,2017,40(2):36-42,45.
[4] 朱宏志. 机器人焊接技术课程在职业院校中的建设探索[J]. 职业,2019(15):72-73.
[5] 钟登华. 新工科建设的内涵与行动[J]. 高等工程教育研究,2017(3):1-6.
[6] 陈宇,肖逸锋,钱锦文. 新工科背景下虚拟焊接实验教学改革[J]. 电焊机,2019,49(12):117-120.
[7] 谢芋江,黄本生,周培山,等. 新工科背景下焊接专业人才培养模式探索[J]. 西部素质教育,2018,4(20):189,198.
[8] 杨林丰,宋珂,杨丽新,等. “微课+创新训练”模式下的焊接机器人实践教学设计[J]. 焊接技术,2018,47(10):101-104.
[9] 黎文航,朱杰,陈书锦,等. 新型《焊接机器人》本科教材的编制[J]. 机械制造文摘-焊接分册,2015(5):42-44.
[10] “新工科”建设行动路线(“天大行动”)[J]. 高等工程教育研究,2017(2):24-25.
[11] 林健. 面向未来的中国新工科建设[J]. 清华大学教育研究,2017,38(2):26-35.
[12] 李佳玉,彭见辉. 基于“理虚实一体化”的“工业机器人技术”课程改革[J]. 新课程研究(中旬-双),2017(5):18-19.
[13] 朱必武. 基于理虚实一体化的中职汽修课堂研究[J]. 汽车实用技术,2019(14):233-234.
[14] 李春梅,何洪,李元,等. “新工科”背景下材料类专业“虚实互补”实验教学体系深化研究[J]. 西南师范大学学报(自然科学版),2020,45(4):143-148.
收稿日期:2020-07-29
基金项目:2020年湘潭大学第十一批教学改革研究项目;2019年第二批教育部高教司产学合作协同育人项目(201902143004)
作者简介:陈 宇(1988— ),男,硕士,主要从事焊接技术与工程专业的教学与科研工作。E-mail:chenyu274@xtu.edu.cn。
猜你喜欢
中国管理信息化(2017年14期)2017-09-20 09:45:26
中国大学教学(2017年5期)2017-09-05 19:35:51
计算机教育(2017年8期)2017-09-01 15:00:02
科技视界(2017年10期)2017-08-21 07:51:35
电脑知识与技术(2017年16期)2017-07-14 15:42:16
教育教学论坛(2017年9期)2017-03-20 20:00:22
亚太教育(2016年31期)2016-12-12 08:50:27
企业文化·下旬刊(2016年4期)2016-04-28 15:21:08
机械制造文摘·焊接分册(2015年5期)2016-02-02 00:56:11
科技视界(2015年9期)2015-04-07 11:10:41