
机器人示教误差成因分析及消除
2017-03-20 20:00刘伟郭广磊
教育教学论坛 2017年9期
关键词:焊接机器人
刘伟+郭广磊


摘要:文中对机器人示教误差产生的原因和示教误差对焊接产生的影响以及解决办法进行分析和论述。
关键词:焊接机器人;示教误差对焊接的影响;消除方法
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2017)09-0081-02
一、示教再现及示教误差
(一)示教再现
机器人的编程类型主要有:示教编程、机器人语言编程与离线编程三种。目前,以示教编程型机器人最为普遍,它是通过移动机器人手臂,将焊丝端部(TCP点)的移动轨迹以坐标点的形式存储下来,并生成一个机器人焊接作业程序,该“作业程序”为一组运动及辅助功能命令,通过自动运行,机器人可以重复地顺序执行一系列的焊接作业,这就是示教—再现工作过程,如图1所示:
(二)示教误差及影响
由于焊接机器人的示教过程是通过“眼(观测)”→“脑(判断)”→“手(动作)”的配合,因此,示教误差决定着机器人程序的编程质量和实用价值。
示教误差就是观测位置坐标点和实际位置坐标点之间的差值。焊接机器人设备系统的重复定位精度通常小于±0.1mm,对于薄板焊接,焊丝与焊缝的偏离程度不能大于±0.5mm,否则将导致焊偏甚至焊接失败。例如,马鞍形工件的焊缝路径,焊枪角度需要跟随“相贯线”焊缝位置变化相应做出焊枪姿态的改变,这对机器人焊枪姿态和示教点的准确度要求很高,稍有误差就会出现焊接缺陷,如图2所示。
为了保证示教轨迹的准确性,通常要在100mm的焊缝上示教50个点,以保证焊接机器人运行平滑及焊缝轨迹的精确。
二、示教误差类别及消除方法
(一)观测误差
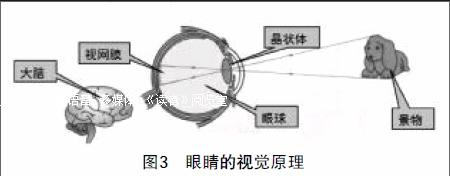
人眼的结构相当于一个凸透镜,眼睛之所以能看见周围的各种物体,一是必须有光,二是眼球内具有可以成像的构造。当我们睁开眼睛,从周围物体发射或反射而来的光,穿过瞳孔和晶状体,聚集在眼睛后面的视网膜上,形成这些物体的图像,连接视网膜的视神经立即把这些信息传送到大脑,所以,我们就能看到外界物体。眼睛观测景物的原理如图3所示。
眼睛在观测物体时是通过晶状体的调节作用来实现的,它相当于一个凸透镜,当晶状体(凸透镜)放松时变薄,远处来的光线恰好会汇聚在视网膜上,眼球可以看清远处的物体。当晶状体(凸透镜)收缩时变厚,眼球可以看清近处的物体。示教工作中,观测误差主要反映在视距误差和视角误差两方面。
1.视距误差。结合编程示教工作,眼睛离工件位置越近、成像越大,焊缝看得越清楚。焊缝离眼睛越远,成像越小,越不利于观察。实际工作中,经常出现编程示教人员在较远的距离观察示教点的情况,造成视距误差的产生,致使焊丝偏离焊缝的情况发生。所以建议眼睛与示教点的最佳观测距离为100mm—500mm。
2.视角误差。人的左、右眼观看同一位置的物体,如果观测的角度不同,在视网膜上形成的像位置并不相同,例如,当示教编程人员处于高位向斜下目测焊丝端部与焊缝位置来确定示教点,此时,出现近点(实际位置点)和远点(眼睛观测到的位置点),这时,便产生视角误差。
所以,对一个示教点的确定,一是要近距离观察,另外,需要前后、左右、上下观察并修正示教点位置,消除从一个角度观察所产生的视角误差。
(二)方法误差
1.忽视焊丝干伸长变化,导致弧长和焊接电流随之不断变化。
2.避免用手掰直焊丝端部的错误做法,保持焊丝端部处于自然状态;注意导电嘴磨损后孔径扩大。
3.焊枪姿态不对,调整正确的焊枪行走角与工作角。
(三)系统误差
1.工具中心点(TCP)不准,造成示教误差。要定期进行TCP点校准,或在工作台上设置一个基准点,定期检查TCP点是否偏离。
2.由于撞击或关节部位长期磨损,机器人重复定位精度差超±0.1mm,此时应通知机器人生产企业维修。
3.工装夹具设计制作不合格,应改进工装夹具或重新设计。
(四)工件误差
上道工序问题造成工件的重复精度不够。CO2焊接时,工件的重复精度大于±0.5mm;TIG焊接时,工件的重复精度大于±0.2mm时会导致焊偏。应改进生产工艺方法,提高工件精度。
(五)其他因素
1.光线不足。在较暗的光线下,瞳孔会变大,让更多的光线进入眼中;而在明亮光线下,瞳孔变得很小,阻止光线进入,起到护眼作用。所以,示教现场的光线应明亮、柔和。
2.身体条件。示教人员身体条件和视力应满足现场示教要求。
3.身体疲劳。如果晶状体的肌肉长时间处于紧张状态,眼部肌肉就会疲劳,失去调节能力,看到的景物就会模糊。
4.工作态度。由于工作责任心不强造成的示教误差。应着力培养严谨、快速、精准、规范的职业素养。
三、总结
实际工作中,应根据误差种类进行分析、判断和解决。示教误差成因汇总如图4所示。
综上所述,焊接机器人虽然是一种自动化程度很高的现代装备,但它还是要通过操作人员进行示教编程来实现,这就需要机器人操作者不仅要具有应用技能,还要具有精益求精的工作责任感,才能使机器人设備在工业生产中发挥更大的作用。
参考文献:
[1]吴九澎,等.机器人应用手册[M].北京:机械工业出版社,2014.
[2]刘伟,等.焊接机器人基本操作及应用(第2版)[M].北京:电子工业出版社,2015.
Robot Teaching Error Cause Analysis and Elimination
LIU Wei,GUO Guang-lei
( Xiamen Jimei Vocational and Technical Schools,Xiamen,Fujian 361023,China)
Abstract:The causes for the robot teaching and teaching error on the impact of welding and the solution are analyzed and discussed in this paper.
Key words:welding robot;Teach the error influence on welding;elimination method
猜你喜欢
山东工业技术(2017年23期)2017-11-28
科学与财富(2017年24期)2017-09-06
企业文化·下旬刊(2016年4期)2016-04-28
机械制造文摘·焊接分册(2014年3期)2014-08-14
