
回波幅度信息辅助的群目标航迹起始方法
2020-09-05 14:35张贞凯
雷达学报 2020年4期
靳 标 李 聪 张贞凯
①(江苏科技大学电子信息学院 镇江 212003)②(西安交通大学电子与信息工程学院 西安 710049)
1 引言
多目标跟踪一直是目标跟踪领域中的热点和难点问题之一[1—3]。当多个目标的空域分布范围较小且运动特征相近时,多目标跟踪的问题便转化成了群目标跟踪,如分裂的空间碎片[4—6]、飞机编队[7]、迁徙的鸟群和迁飞的昆虫种群等[8]。在群目标跟踪的过程中,雷达视野内的目标个体一般都比较小,并且受限于雷达的分辨率和工作波长,群内个体目标往往是不可分辨的[9]。在这种情况下再试图对群内所有个体进行跟踪是不现实的,而且在某些实际应用中也是不必要的。因此,需要以“群目标”为对象对集群的整体运动趋势进行跟踪。
群目标跟踪的首要环节是航迹起始,具体是指进入稳定跟踪之前的航迹确认过程。群目标的航迹起始,关键步骤在于分群检测和求解等效量测,即所谓的群起始[10]。常用的群起始算法包括k-均值聚类和集群引晶等[11]。k-均值聚类算法需要预先已知集群数量,收敛缓慢,而且性能受噪声的影响较大。集群引晶算法则引入门限值进行判别,不需要已知集群数量,但起始收敛缓慢、计算量大,并且要求的前提条件较为苛刻。文献[10]提出了一种基于群目标几何中心的航迹起始算法,首先根据监视区域内多个目标回波的空间距离进行分群检测预处理,在完成分群检测后再求解每个群目标的几何中心,然后确定该门限区域内的各个目标回波相对于几何中心的权值,并据此构建出等效量测。文献[10]的算法克服了k-均值聚类和集群引晶算法的缺点,但由于其仅利用目标位置加权求解等效量测,适用于群内个体目标回波幅度比较均匀的群目标,当个体目标的回波幅度随机起伏较严重时该方法将不再适用。
事实上,雷达数据录取终端所能提取的目标点迹信息除了空间位置参数外,还包括多普勒和回波幅度等信息,充分利用这些信号层的目标信息辅助雷达数据处理,将有助于提高目标跟踪算法的性能和航迹质量。基于这一思想,本文提出一种回波幅度信息辅助的群目标航迹起始算法。首先综合利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标的航迹起始。本文方法充分利用了目标的幅度信息,不仅可以在集群数量未知的情况下准确划分群,而且降低了失跟率,提高了跟踪航迹的质量。仿真结果验证了该方法的有效性。
2 问题描述
不失一般性,本文以迁飞性的昆虫种群为例描述群目标跟踪模型。图1为昆虫种群的空间密度分布情况。如图所示,椭圆区域内的昆虫种群密度较大,这些点的目标回波幅度也比较强,实际情况中要重点对椭圆区域内的目标点迹进行跟踪。本节给出群目标状态模型与观测模型。
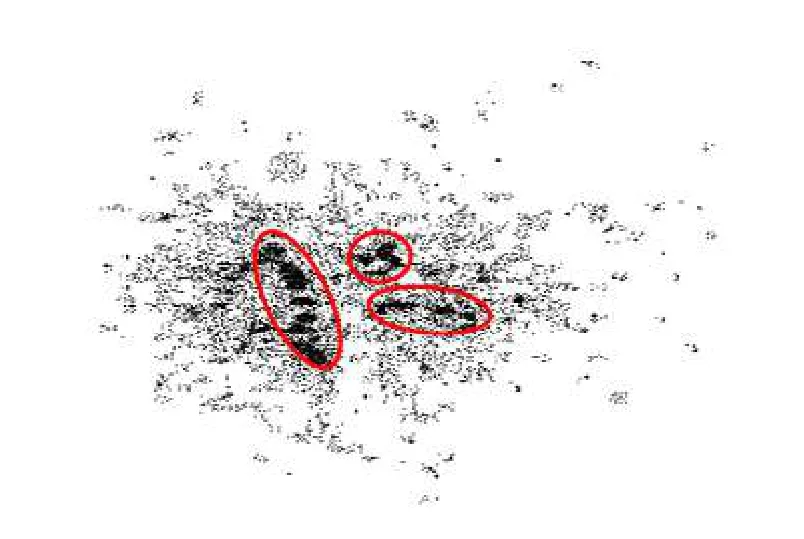
图 1 昆虫种群空间密度分布场景Fig. 1 Spatial density distribution of insect population
2.1 群目标状态模型
群目标与点目标的区别在于群目标占据了一定的空间,需要有一个状态参量对群目标的形状进行刻画。本文将群目标的形状以椭圆形式建模,利用二维对称正定矩阵表示群目标整体形状的扩展状态。群目标的形状可以用式(1)的数学表达式进行刻画[12]其中, y 表示椭圆表面上的点, Xk为一对称正定矩阵,表示目标形状的扩展状量测矩阵,群目标运动状态向量,T表示矩阵转置。扩展状态 Xk的演变过程可表示为[13]


其中, δk|k-1是 一个标量, W (Y;a,C)为随机矩阵Y的Wishart分布的概率密度函数,定义为
其中,c是归一化因子,a>d—1, etr(·)表示exp(trace(·))。
第j(j =1,2,··,J)个群目标的等效量测在二维平面内的运动状态模型为
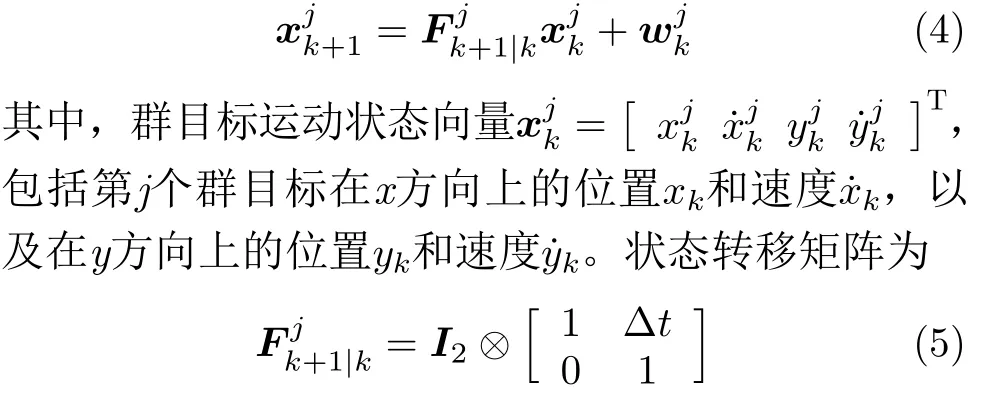
其中, I2为 二维单位矩阵,⊗ 代表K(ronecher积),状态噪声协方差包括运动状态协方扩展状部分,表示群目标状态不仅受运动状态的影响,还受扩展状影响。运动状态协方差矩阵为[14]

2.2 群目标观测模型
将雷达在k时刻接收到的观测点迹集合表示为Zk。假设雷达位于原点位置并保持静止,一个观测向量 zk都 包含径向距离 rk, 方位角 θk两个位置参量和幅度参量 Ak,即

观测模型为

其中,量测矩阵为

量测噪声 vki~ N0,λXki+Rik,其中 λ为一个标量,以描述扩展状态 Xki的作用大小。 Rki为真实量测噪声协方差,即

其中,方位角 θk观测噪声方差为 σθ2;径向距离 rk的状参量 Xk相互独立的条件下,群目标状态的似然函数可表示为[15,16]

3.1 分群检测
首先设定目标幅度门限,大于门限的幅值点的个数为集群数量的初始估计L,通过k-均值聚类算法得到子群数据和子群中成粗划分群。
定义 k 时 刻l个 子群中心与第 j个子群中心的距离为[17—19]

那么,子群中心之间的空间距离判别矩阵为

其中,M为子群的距离门限。角矩阵。判别矩阵元素为0对应的两个子群合并,并得到精确的集群数量,然后再次通过k-均值聚类算法精确划分子群,并求出子群中心,从而完成分群检测。具体的算法流程如图3所示。可见,分群检测大大减少了整体航迹的数量,降低了计算机的存储量和计算负担。
3.2 等效量测形成
分群检测之后,采取距离加权和幅度加权的方法求解群目标的等效量测。对于第i个子群中心,群内第i个量测的距离权值为
第i个量测的幅度权值为
3 幅度信息辅助的群目标航迹起始方法
本部分首先利用聚类算法完成分群检测,然后通过群内目标幅度加权和距离加权求解等效量测,最后利用等效量测起始航迹。具体算法流程如图2所示。
那么等效量测可表示为

图 2 本文算法的流程Fig. 2 The flow of the algorithm in this paper
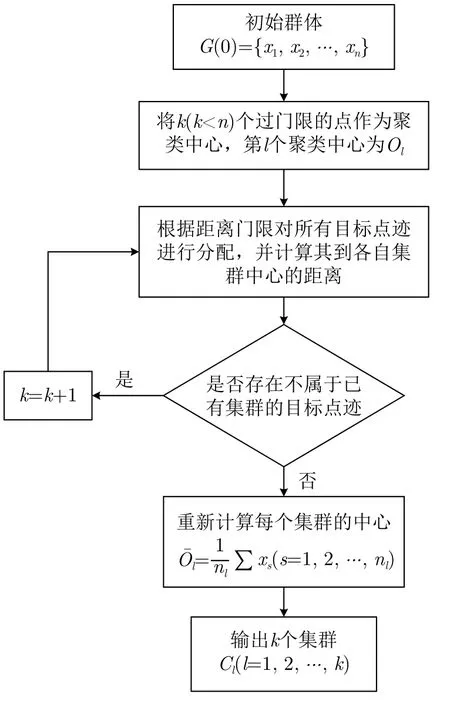
图 3 分群检测的具体流程Fig. 3 The specific process of cluster detection
其中, Ai和 Ri分别为群内第i个目标的幅度值和距离值, R¯ 为 集群中心的距离值, zki为 第i个原始量测,α 和 β 分 别为幅度和距离的权重,并且 α +β =1。
3.3 航迹起始
航迹起始采用修正的逻辑法[20]进行,具体步骤如下:
步骤1 用第1次扫描求得的群目标等效量测为航迹根节点,用目标最大速度建立初始相关波门,对落入相关波门的第2次扫描得到的等效量测建立可能航迹;
步骤2 对每个航迹进行外推,以外推点为中心,后续相关波门的大小通过航迹外推误差协方差计算得到,将落入波门内的等效量测与外推点进行关联;
步骤3 如果后续的波门内没有等效量测,则删除此航迹,继续步骤2,直到形成稳定的航迹。
4 仿真实验与结果分析
3个群目标分别为随机生成的100个高斯分布的点迹集合,其中心位置均值分别为p1=[55000 m,55000 m],p2=[53500 m, 53500 m],p3=[52000 m,52000 m],群中目标点迹幅度的概率密度函数服从莱斯分布[8]。子群之间的距离门限为1550 m,航迹起始门限为4。仿真实验分别从分群检测、求解等效量测和航迹起始成功率等方面进行对比。为了计算航迹起始的成功率,对每条已起始条航迹求其后5个周期内的群目标中心位置估计均方根误差(Root Mean Square Error, RMSE),如果RMSE小于100 m即为航迹起始成功,如果大于100 m则判定为不成功。目标j位置估计的均方根误差定义为
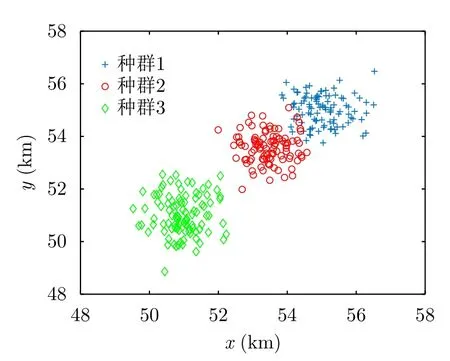
图 4 量测点迹空间分布Fig. 4 The spatial distribution of measuring point trace
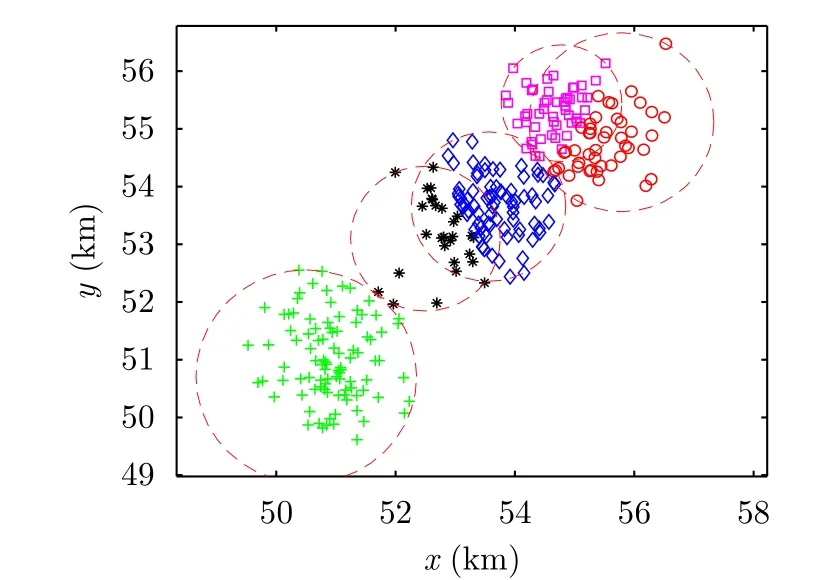
图 5 基于位置信息的分群结果Fig. 5 The clustering result based on location information

图 6 幅度信息辅助的分群结果Fig. 6 The clustering result aided by echo amplitude information
图4 为量测空间点迹的分布图。从图中可以看出3个间距较近的集群,群内部没有固定的几何结构。图5为仅利用位置信息分群后的态势图,利用k-均值聚类算法后得到5个集群。图6为利用幅度信息辅助后再次分群的态势图,其中幅度权值α=0.2和 距离 β =0.8。由图可知分群后得到3个群,很明显幅度在分群过程中起到了关键作用。图7为幅度距离加权形成的等效量测与群几何中心为等效量测的对比图,二者空间位置有明显的差别,这对后续是否能够稳定跟踪有很大影响。面向工程应用的一个实际问题是幅度、距离权值的分配问题。针对不同的幅值观测场景,设置恰当的权值比例将有利于正确起始航迹和稳定跟踪。图8为以种群1为例,不同权值比例形成的等效量测航迹起始对比图,另外两个种群的对比结果相似,这里予以省略。
从图8中可以看出,当幅度权值较大时,航迹明显偏离种群1整体的空间位置。这是因为量测幅值个别点有较大差异,在幅度未知的条件下求解等效量测,会对幅度权值依赖过多,将有可能导致目标航迹偏离真实航迹,从而影响后续的稳定跟踪。可见幅度的权重不能太大,实际中应该以距离权重为主,幅度权重为辅。表1对比了幅度、距离权值不同时航迹起始的成功率。针对本文的仿真场景,幅度权值为0.2,距离权值为0.8的情况下,航迹起始成功率最高。而幅度权值为0.8,距离权值为0.2时,航迹起始成功率只有80%。当幅度权值为0.1,距离权值为0.9时,由于求解等效量测幅度作用小,导致此时等效量测不准确,航迹起始成功率反而低一些。因此在实际工程应用中还需根据观测场景,来合理分配二者的权值。
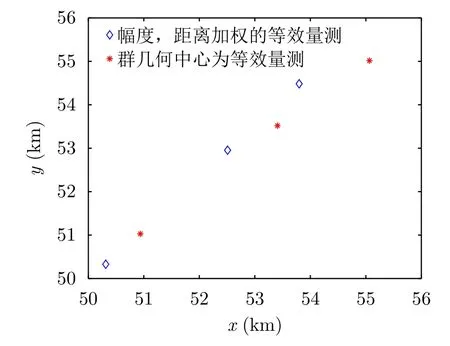
图 7 等效量测对比Fig. 7 Equivalent measurement comparison
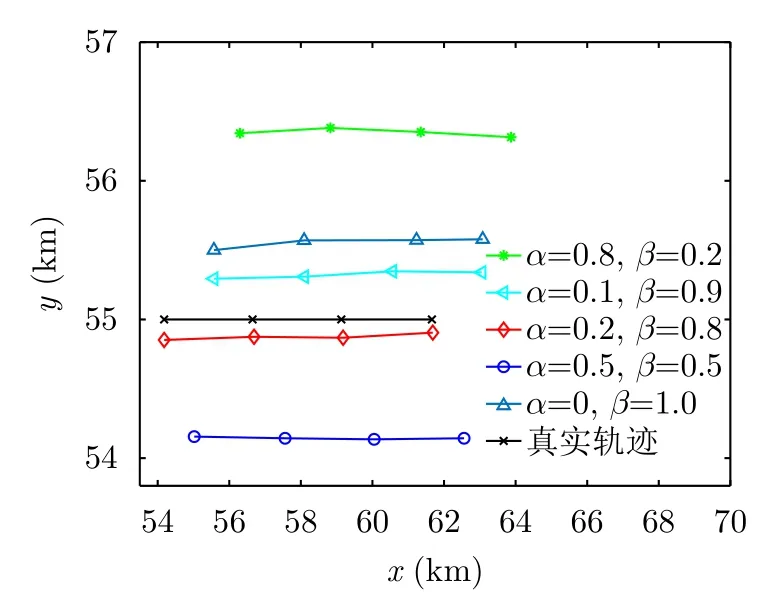
图 8 不同权值大小时的起始航迹对比Fig. 8 Comparison of initial tracks with different weights

表 1 幅度、距离不同权值下航迹起始成功率Tab. 1 The success rate of track start under different weights of amplitude and distance
5 结束语
传统的群目标航迹起始算法仅利用目标的位置信息完成分群检测和求解等效量测,存在分群检测不理想,等效量测求解不准确等问题。针对此问题,本文提出了一种幅度信息辅助的群目标航迹起始方法。该方法综合利用目标的位置和幅度信息,可以在集群数量未知的情况下完成分群检测,并利用目标距离和幅度加权求解每个群目标的等效量测,最终实现群目标的稳定航迹起始。该方法相对于仅利用位置信息的航迹起始方法,起始成功率更高,更利于后续的目标跟踪。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
成都信息工程大学学报(2022年3期)2022-07-21
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
股市动态分析(2021年25期)2021-12-30
雷达科学与技术(2020年4期)2020-09-11
汽车与安全(2019年11期)2019-06-01
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
股市动态分析(2014年27期)2014-07-29
