
一种噪声环境下的雷达目标高分辨率距离像鲁棒识别方法
2020-09-05 14:35李玮杰刘永祥
雷达学报 2020年4期
李玮杰 杨 威 黎 湘 刘永祥
(国防科技大学电子科学学院 长沙 410073)
1 引言
传统雷达目标识别技术依赖于人工设计的特征,而这些特征的完整性和有效性往往缺乏有力保证,并且复杂电磁环境会干扰识别结果,导致传统雷达目标识别技术的精确性和鲁棒性面临极大挑战。而深度学习技术可以自动提取目标本质特征,这种端到端的学习方式大大提升目标识别的精确性和鲁棒性。
有学者通过不同的深度学习方法对高分辨率距离像(High Resolution Range Profile, HRRP)进行目标识别,主流算法包括卷积神经网络(Convolutional Neural Networks, CNN)、栈式自编码器(Stacked AutoEncoder, SAE)、深度置信网络(Deep Belief Networks, DBN)以及循环神经网络(Recurrent Neural Network, RNN)等[1]。其中,文献[2]将CNN应用于HRRP识别,在–20~40 dB的高斯白噪声环境情况下扩展训练集样本,对3类目标进行识别,平均识别率达到91.4%。文献[3]使用直接基于极化距离矩阵、Pauli分解和Freeman分解3种方式提取极化距离矩阵中的信息,并将提取得到的目标特征向量送入CNN进行训练,最终识别率达到100%。文献[4]提出利用RNN中的长短时记忆循环神经网络(Long-Short Term Memory recurrent neural network, LSTM)对HRRP进行识别,使用175个数据进行训练,测试100个样本,全部识别成功。文献[5]提出一种基于RNN的注意模型,使得模型自适应衡量每一个数据段在识别中起到的作用,训练样本个数为 7375,测试数据的样本个数为16655,测试样本识别率达到88.3%。文献[6]将双向LSTM的模型应用于HRRP数据识别,训练样本个数为 7800,测试数据的样本个数为5124,识别率达到了90.1%。文献[7]提出了一种基于双向GRU的注意力机制模型,训练样本个数为 7800,测试数据的样本个数为5124,识别率达到了90.7%。文献[8]中将栈式降噪稀疏自编码器(stacked Denoising Sparse AutoEncoder, sDSAE)用于雷达目标识别,由于深度的增加,该方案的识别效果比K近邻分类方法和栈式自编码器好。文献[9]使用支持向量机、深度神经网络、SAE对Su27, J6, M2K 3种仿真战斗机的HRRP数据进行识别,识别率分别为74.26%, 79.63%和85.00%。
对基于深度学习的雷达目标HRRP识别模型,研究尚在起步阶段,上述研究将深度学习应用于雷达目标识别领域取得了较好的成果,但较少考虑到低信噪比情况下如何提高模型的抗噪声性能。本文提出了一种噪声环境下的雷达目标HRRP鲁棒识别方法,在训练集中插入不同信噪比值的噪声,并使用结合残差块、inception结构和降噪自编码层的卷积神经网络进行识别,在高斯白噪声和瑞利噪声的条件下可以实现在较宽范围信噪比条件下的较高识别率。
2 一种噪声环境下的雷达目标HRRP鲁棒识别方法
2.1 卷积神经网络
卷积神经网络是深度学习的代表算法之一,大量应用于计算机视觉、自然语言处理等领域,使用了稀疏交互(sparse interactions)、参数共享(parameter sharing)、等变表示(equivariant representations)来降低网络复杂度,使得存储需求降低、运算效率提高、具有对平移等变性质[10]。CNN具有分层学习特征的能力,可以训练CNN自动地从HRRP数据集中学习有用特征并分类。
CNN结构分为输入层、隐藏层、输出层,如图1所示。
输入层接收多维数据,一维CNN的输入层接收一维或二维数组,其中一维数组通常为时间或频谱采样,二维数组可能包含多个通道;二维CNN的输入层接收二维或三维数组。
隐藏层通常是由一连串的卷积层、池化层和全连接层组成的。卷积层模仿人眼对环境的识别,参数比全连接层相比大大减少,其功能是对输入数据进行特征提取,通常会有多个卷积核对输入进行处理。经过卷积层后的输出会被传递至池化层进行特征选择和信息过滤,在池化层进行下采样,对特征进行降维,并且使得网络对数据平移保持近似不变。经过多层卷积层和池化层,在全连接层把学习得到的特征聚合起来。
输出层在分类问题中,通常使用softmax层来输出分类标签。
为了防止过拟合,Hinton等人[11]提出Dropout机制,如图2所示,在每次训练时,让神经元依概率(如50%)随机失活,阻止某些特征的协同作用来缓解过拟合,也可以将Dropout作为一种多模型效果平均的方式,每次训练时,模型的结构都会因为Dropout随机性发生变化,多次训练后相当于多个不同模型结合起来得到最终模型,能很好地缓解过拟合。

图 2 Dropout示意图Fig. 2 The schematic diagram of Dropout
网络在训练阶段,文献[12]证明了交叉熵代价函数要优于平方差代价函数,因此本文采用交叉熵函数损失函数,假如给定一个带标签的数据集i 个训练数据 x(i)经过网络后得到输出层标签向量o(i),则交叉熵损失函数表达式为。

其中, D 为样本维数, mb为批训练样本个数,第i个 训练数据 x(i)对 应的标签数据集的第 j维对应值,第i个 输入数据 x(i)对应的输出层标签向量的第j维对应值。
2.2 残差块、inception结构和降噪自编码层
本文受文献[13]启发,为了进一步提高网络深度,降低噪声影响,提高网络性能,使用了图3所示的残差块,其中数据流向有两条,一条经过卷积层,另一条不经过卷积层。残差块包含的卷积层个数和卷积层的核参数都是可以调节的。残差块可以有效提高网络深度,而网络深度的提高可以提取更深层次的特征,这种特征具备更好的鲁棒性。

图 3 残差块结构图Fig. 3 The structure of residual block
在使用残差块来提高网络深度的同时,借鉴inception结构[14]来增加网络宽度来更好学习特征,提升网络性能。利用稀疏网络结构产生稠密的数据,这样将稀疏矩阵聚类为较为密集的子矩阵来提高计算性能,在提高神经网络性能的同时,又能保证计算资源的使用效率。GoogLeNet团队提出了inception网络结构,通过这种结构来搭建一个稀疏性、高计算性能的网络结构。卷积核的核尺寸影响感受野的大小,因此选择不同的核尺寸会影响学习结果,该结构使用了不同核尺寸模块,由网络自行选择参数,从而将选择不同核尺寸的权重这一步骤交由模型自行学习,这样就通过稀疏的卷积连接产生了不同感受野范围下的稠密数据。如图4所示,inception结构使用了多个子模块,将核尺寸1, 3和5的卷积层和池化层并联在一块,并在在核尺寸为3, 5的卷积层前面和池化层后面分别加上了核尺寸为1的卷积核,来降低数据维度,增加了网络对尺度的适应性和网络宽度来更好地学习特征。
降噪自编码器通过对输入数据加噪,使得模型学习如何去除噪声,还原本来的数据,从而提高模型鲁棒性[15]。增加了如图5所示降噪自编码器层来进一步降低噪声影响,在训练时通过随机丢弃输入来实现对输入的损失,近似模拟噪声对数据影响,而输出通过训练来还原为原始输入。其中隐含层的数量和节点数可以调节,对网络的损失函数重新定义,加入了对降噪自编码器层输入和输出之间的均方误差函数,进行整体网络的训练。降噪自编码器层的均方误差对于降噪自编码器层之后的层没有影响,但会影响之前层的训练。

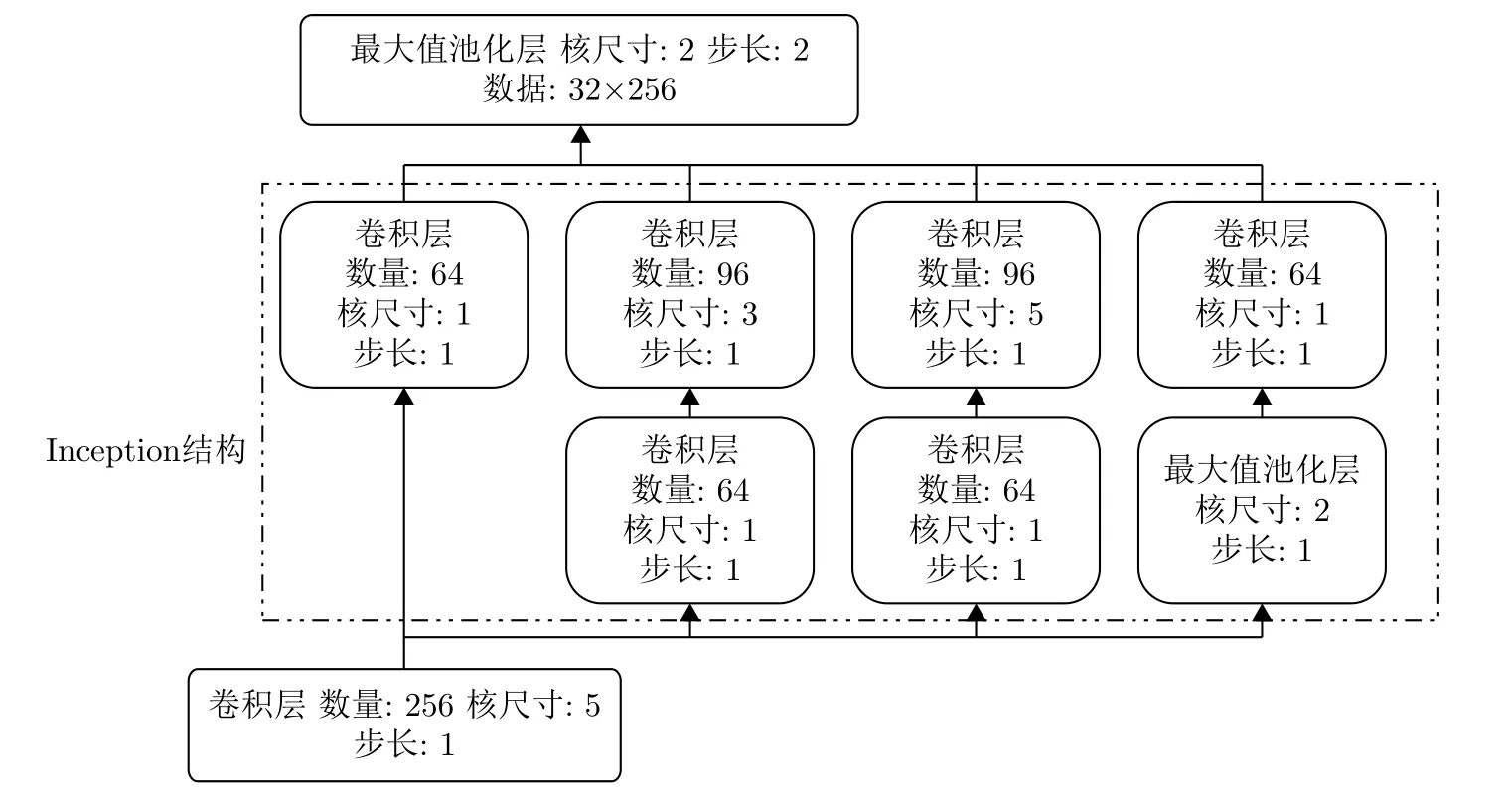
图 4 Inception结构图Fig. 4 The structure of inception

图 5 降噪自编码器层结构图Fig. 5 The structure of residual DAE
其中, J2为 新的损失函数, J1为网络交叉熵损失函数,降噪自编码器层输入,降噪自编码器层输出, mb为 批训练样本个数, α为超参数控制降噪自编码器层损失函数占总体的权重,本文取1。
2.3 结合残差块、inception结构和降噪自编码层的卷积神经网络
将以上模块结合起来,本文所设计的网络结构如图6所示。
网络使用了两个残差块,之后链接了一个inception结构以更好学习通过残差块得到的特征,最后一个卷积层是为了降低数据维数,并且在最后一个卷积层后链接一层降噪自编码器降低噪声影响。其中残差块和inception结构的数量和位置可以调节,而降噪自编码器层使用的是全连接层,放在网络的较高隐藏层,通常是最后全连接层部分。网络各部分功能框图如图7所示。
3 实验结果与分析
实验平台为64位Window10系统,CPU2.8 GHz,内存8 GB,采用Tensorflow框架CPU版本实现。采用3类实测飞机目标雷达HRRP实测数据,其中雷达的中心频率为5520 MHz,信号带宽为400 MHz,飞机的参数如表1所示,其时域特征示意图如图8所示。其中“安26”为中型螺旋桨飞机,“奖状”为小型喷气式飞机,“雅克42”为中型喷气式飞机。

表 1 飞机参数(m)Tab. 1 Parameters of planes (m)
每类有26000个样本,随机抽取不放回得到训练集每类23000个样本,测试集每类3000个样本,每一个样本为256维,学习率为0.001,优化算法使用Adam算法,批训练大小mb为100。值得指出的是训练集样本的增多会提高识别率,当每类7000个时,在高斯白噪声条件下,图6和图9所示模型在0 dB下相差较大,约15%左右,但增加训练集数量后,差距会减小。这说明当拥有足够数据时,模型的复杂度对于结果的影响会降低。

图 6 网络结构Fig. 6 The structure of network

图 7 网络功能框图Fig. 7 The block diagram of network function

图 8 HRRP数据示意图Fig. 8 Schematic diagram of HRRP
文献[16]指出信号的正交分量和同向分量中噪声类型可以假设为高斯白噪声。文献[17]指出复信号的噪声幅度服从瑞利分布,因此本文在瑞利噪声的环境下进行实验,根据信噪比对样本添加瑞利噪声,训练集的每类样本中的4000个样本加入SNR=0 dB的瑞利噪声,每类样本中的2000个样本加入SNR=15 dB的瑞利噪声,其余训练样本不进行加噪处理,再进行归一化处理。需要指出的是,加入不同信噪比的样本的数量对结果会有一定影响,加入某信噪比下的样本越多,会提高该信噪比样本的识别率,同时降低其他信噪比样本识别率,使用不同比例的样本,会导致识别率发生变化,因此如果加入过多低信噪比样本会导致对于高信噪比样本识别率下降。测试集样本加入不同信噪比的瑞利噪声,使用训练集样本的归一化参数进行归一化处理。为了对照观察网络深度和宽度对结果影响,参考文献[2]和文献[3]使用了如图9所示的卷积神经网络,含有2个卷积层和2个池化层。识别结果如表2所示。
其中信噪比公式为


图 9 卷积神经网络结构图Fig. 9 The structure of CNN
其中, Ps为 信号的平均功率, D为样本维数,即距离单元个数,为256, Pd为第d个距离单元上信号功率, n0为噪声功率。
考虑到不同噪声类型对结果的影响,本文还在高斯白噪声下进行了实验,训练集的每类样本中的4000个样本加入SNR=0 dB的高斯白噪声,每类样本中的2000个样本加入SNR=15 dB的高斯白噪声,其余训练样本不进行加噪处理,再进行归一化处理。测试集样本则加入不同信噪比下的高斯白噪声来测试模型性能,使用训练集样本的归一化参数进行归一化处理。结果如表3所示。
通过对比结果可以发现,随着网络深度和宽度的增加,提取得到的特征受噪声影响会越来越小。模型在低信噪比情况下的识别能力进一步得到提高,各个信噪比之间的识别率差别进一步缩小。这是由于随着网络复杂度的提升,提高了对于样本的学习能力,增强了网络性能,因此对于包含了噪声样本和正常样本的训练集,改进后的网络可以更好地学习两者特性,只需通过几个点的信噪比就可推广到较宽信噪比范围下的样本分类。但要想得到更好结果,可能需要对样本和模型两个方面进行调整。调整样本信噪比分布,增加网络深度和宽度,在多处隐藏层中插入自编码器,可以进一步提高识别率,缩小各个信噪比之间的识别率差距,达到在各种信噪比情况下识别率的一个平衡。
同时可以发现,如果在训练集中未加入噪声,所得到的模型其实对于低信噪比的测试样本是没有识别能力的,因此出现了过拟合现象,训练集丧失了泛化能力,识别率急剧下降甚至到0。但加入0 dB和15 dB的噪声后,模型具备了在较宽范围下的识别能力。说明模型需要一定的先验信息进行学习并泛化到其他条件下的识别。并且模型在两种噪声类型下的表现均不错,这是由于深度学习模型是由数据驱动的,对于数据噪声类型没有过多要求,因此在实际应用中模型训练时加入低信噪比样本可以提高模型的抗噪性能。

表 2 训练集加入瑞利噪声结果Tab. 2 Recognition results based on Rayleigh noise training set
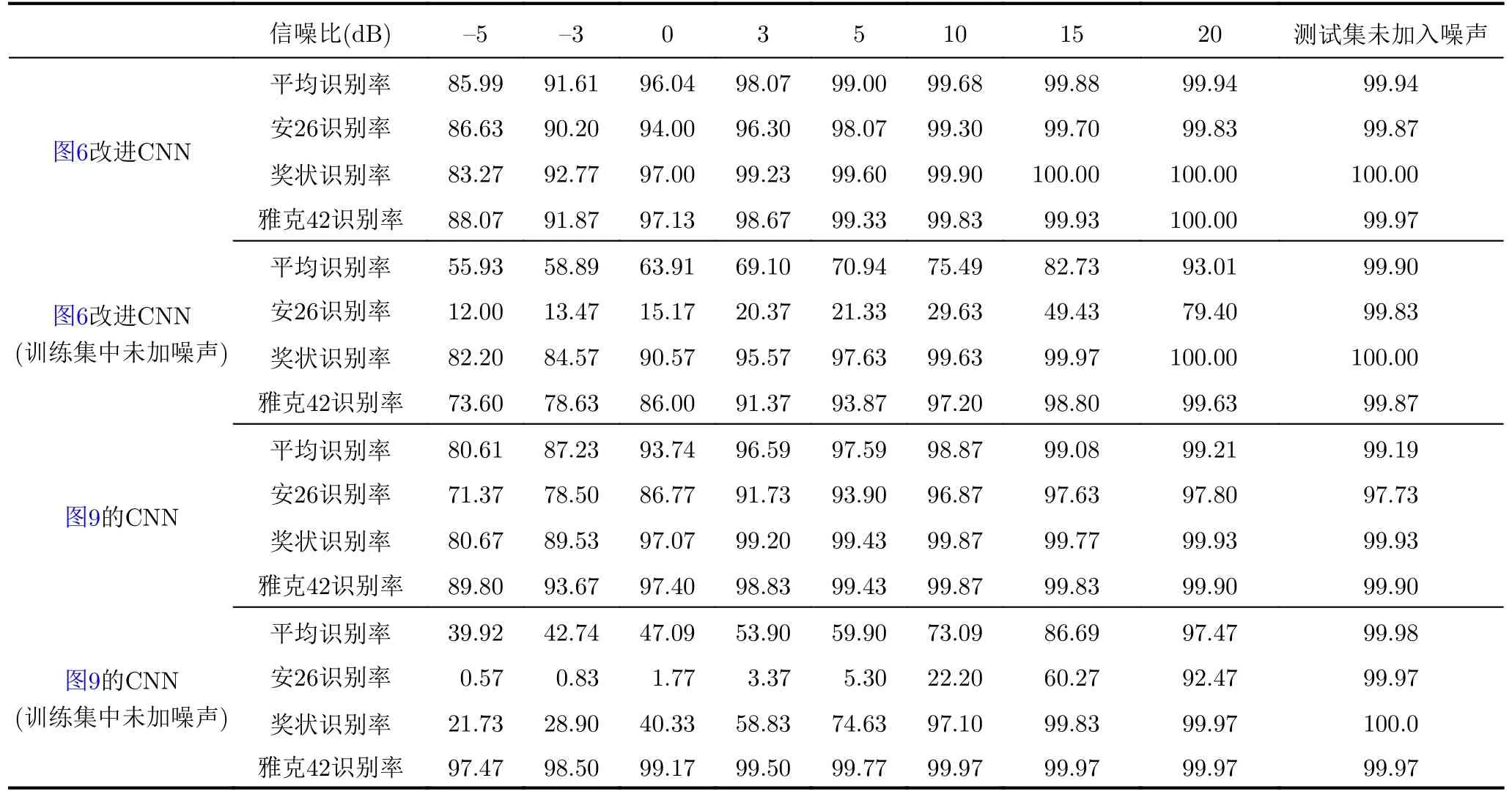
表 3 训练集加入高斯白噪声结果Tab. 3 Recognition results based on White Gaussian noise training set
为了进一步探究训练集和测试集中噪声类型对结果的影响,本文在训练集和测试集中使用了不同类型的噪声进行实验,得到的结果如表4所示,方案1为训练集使用瑞利噪声测试集使用高斯噪声,方案2为训练集使用高斯噪声测试集使用瑞利噪声。通过结果可以发现识别率有所降低,但对比训练集未加噪来说仍有较高的识别率,说明模型在这两种类型的噪声之间具有泛化性,这可能是因为这两种噪声类型的差异不大,识别率不会下降过多,但模型是否可以泛化到更多的情况下还需要进一步研究。
为了更好地理解各个结构对识别率的影响,本文删除了网络中部分结构来观察对结果的影响。在高斯白噪声环境下,并且降低训练集样本数到每类6000个,训练集的每类样本中的1000个样本加入SNR=0 dB的高斯白噪声,每类样本中的500个样本加入SNR=15 dB的高斯白噪声,其余训练样本不进行加噪处理。通过表5可以发现,改变网络的宽度和深度都能影响网络的性能。降噪自编码器层在某种程度上消除噪声,也是提高网络性能的一种方案。

表 4 不同噪声类型识别结果Tab. 4 Recognition results based on different noise types

表 5 删除结构加入噪声结果Tab. 5 Recognition results based on deleted structure
4 结束语
本文提出一种噪声环境下的雷达目标HRRP鲁棒识别方法,通过增强训练集和使用结合残差块、inception结构和降噪自编码层的卷积神经网络。实验结果表明,本方法能保证较宽信噪比范围内的识别性能。同时本文在对训练集中加入噪声时,无需像文献[2]中加入从–20到40 dB的噪声样本,而是插入几个点的噪声即可,模型可以根据所加入的几个信噪比学习到其他信噪比下的样本识别能力。此外,对于模型深度和宽度提高对于噪声环境下识别性能提升的机理有待进一步研究。
猜你喜欢
传感器世界(2022年4期)2022-08-05
传感器世界(2022年3期)2022-05-24
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
