海洋波导环境对航行器噪声测量影响的研究
2020-09-03 07:53:04孔德义钱玉洁
合肥工业大学学报(自然科学版) 2020年8期
徐 贺, 孔德义, 钱玉洁
(1.中国科学院 合肥物质科学研究院,安徽 合肥 230031; 2.中国科学院智能机械研究所 传感器技术国家重点实验室,安徽 合肥 230031; 3.中国科学院智能机械研究所 安徽省仿生感知与先进机器人技术重点实验室,安徽 合肥 230031; 4.河海大学 物联网工程学院,江苏 常州 213022)
0 引 言
水下航行器对维护我国海洋权益的重要性不言而喻,而辐射噪声作为航行器重要性能指标[1-2],准确测量其辐射噪声大小不仅可以检测设备性能,还能为改进航行器的设计提供依据。然而目前对于海洋波导环境给测量带来的影响却研究较少。文献[3]研究了用垂直阵和单水听器测量水下目标噪声的误差分析和修正方法,给出了在波导环境中测量水下目标辐射噪声的误差范围并提出修正方法;文献[4]研究了阵列的测量高度和海底处堆积物对测量结果的影响;文献[5]研究了声源声聚焦对辐射噪声测量误差的分析。这些因素对测量结果究竟影响多大,修正量值为多少尚不得而知。因此本文进行海洋环境对水下航行器噪声测量影响的研究,通过研究不仅可以为水下航行器噪声实际测量结果误差的修正提供依据,也可以为航行器测量环境和测量方式的选择提供参考。
1 水下航行器的仿真
众所周知,水下航行器是大型复杂结构体,其内部装载了很多设备、管件以及连接体,各个设备的复杂振动和激励通过管件、连接体等向外传播[6]。在不同的运动状态下,振动与激励在设备和连接体之间的耦合传导也有所不同,但从整体来看,其噪声主要来源于如下4个部位:① 指挥台围壳与水体的相互激励产生噪声; ② 发动机及其基座连接体的振动,发动机在运转时产生的巨大振动通过不同途径传递到水体中;③ 主电机的振动噪声对辐射噪声场的贡献也比较大,因此主电机也是一个主要噪声源;④ 航行器尾部的螺旋桨产生的噪声与前面的噪声源辐射噪声机理有所不同,其辐射噪声大小与转速关系密切,而且噪声是直接传递到水体中的。
在对水下航行器进行仿真模拟时,可以把航行器辐射噪声场看成是由其4个主要噪声点辐射声场的合成,因此可以通过对不同噪声源声场的叠加来得到总的声场。根据水下航行器内部主要噪声源的位置分布,航行器仿真模型如图1所示。

图1 直角坐标系下航行器噪声源分布示意图
航行器各个主要噪声源的具体分布位置及对总声场的贡献比见表1所列。

表1 噪声源分布情况
根据对航行器辐射噪声特性的分析,其辐射噪声主要包含机械振动噪声、水动力噪声以及螺旋桨噪声3种。从航行器辐射噪声频谱角度来看,主要是由线谱叠加连续谱组成,在高频段其谱级按照约6 dB/Oct逐渐下降,水下航行器辐射宽带噪声信号仿真如图2所示。

图2 航行器辐射宽带噪声信号仿真
2 构造海洋波导环境
水下航行器辐射噪声的测量是在水中完成的,因此需要构建声波在水媒质中传播的声场。射线声学理论[7-9]是一种构造海洋波导环境的经典理论,它把声波在水体媒质中的传递看成是一根根声线向外延伸,声线携带着声能量从不同的途径到达接收点。
根据射线声学理论,水媒质声场中的声压可表示为:
P=A(r)eikL(r)
(1)
其中,L(r)为声线程,声波在传播过程中声能量不断扩散和衰减。设有一点声源,其辐射声线的角度分别为θ0和θ0+dθ0,射线与接收位置处相距dr,参考声强设为I0,在接收点处声波的声压可表示为:

(2)
其中,Ns为海面反射声线的次数;Nb为海底反射声线的次数;θsi、θbi分别为第i次海面、海底反射声线的角度;Vsi、Vbi分别为声线第i次海面、海底反射时的反射系数;β为水体媒质吸收系数;L为声程。
3 设计恒束宽垂直阵
设计恒束宽垂直阵[10-11]对航行器辐射噪声进行测量,既可以保证接收到航行器辐射的全部噪声,又可以避免接收其他噪声干扰。波束宽度为:
20log|B(θ-3 dB)|=-3
(3)
其中,B(θ)为线阵的波束图。目标测量频带设为20 Hz~1 kHz,设计的恒束宽嵌套阵的一个子阵如图3所示。

图3 恒束宽嵌套阵子阵
对低频子阵和高频子阵的信号输出采用不同的加权处理,可得阵列信号输出为:
BC(θ,f)=L(f)BL(θ,f)+H(f)BH(θ,f)
(4)
结合正横方向上边界条件,即
(5)
可得嵌套子阵的加权系数为:
(6)
(7)
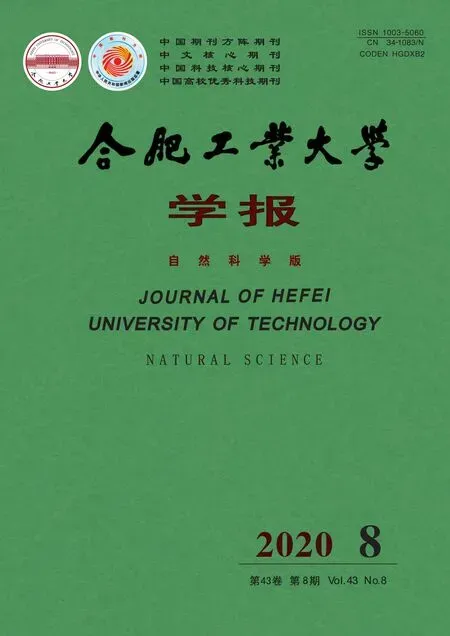
对阵元输出信号先加权处理,再通过不同频段对应的滤波器,就可以实现对全频带范围内阵元输出信号进行求解,得到恒束宽嵌套波束,如图4所示。
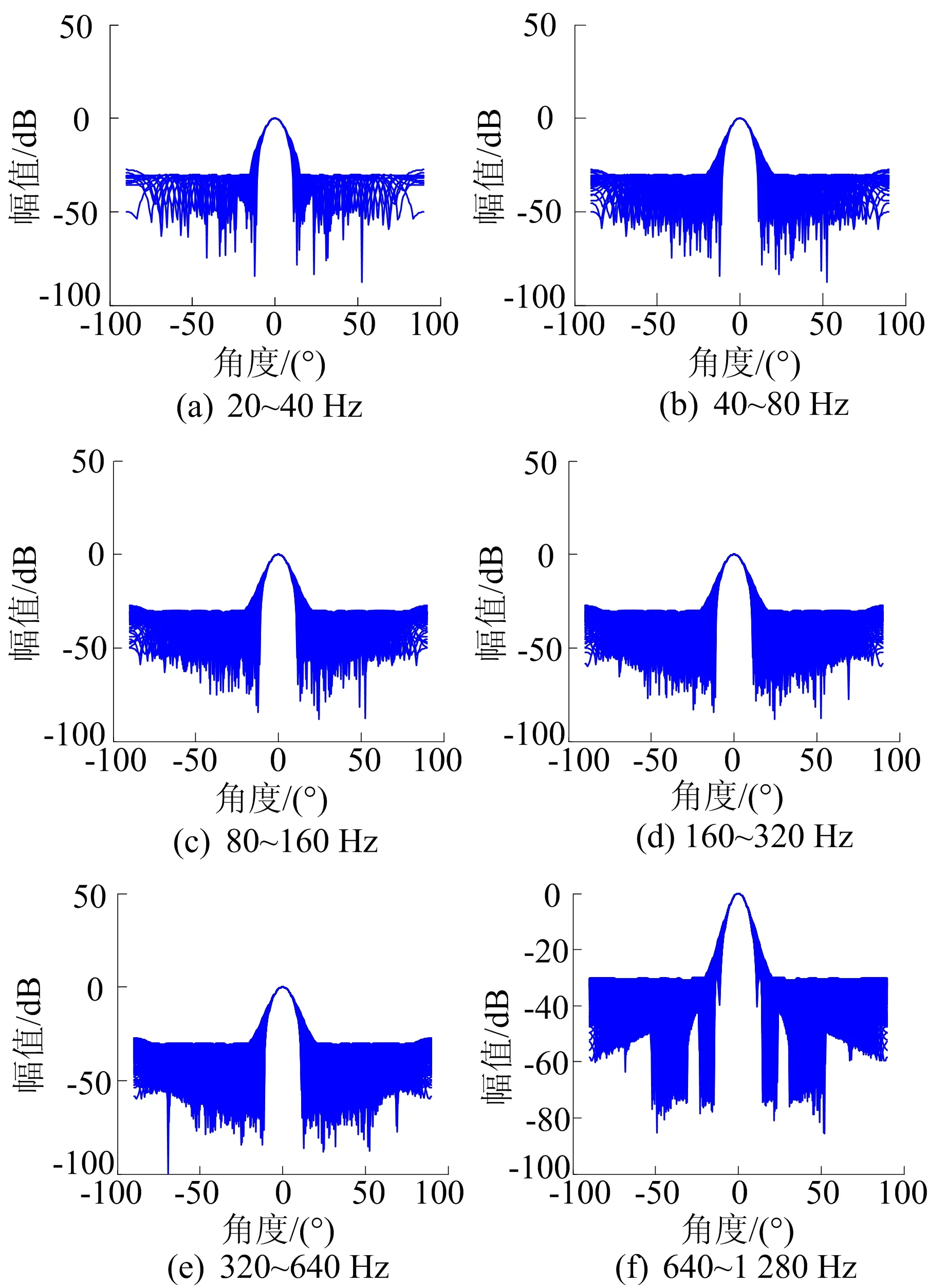
图4 各频段恒束宽嵌套阵波束输出
4 波导环境对航行器测量的影响
4.1 水体深度的影响
当水体深度不同时,声线在海底海面的反射路径和反射次数均会不同,不同海深时声场衰减图如图5所示。从图5可以看出,不同海深时航行器辐射噪声产生的声场分布也会有一定区别,因此水体波导边界对于测量结果也会产生影响。
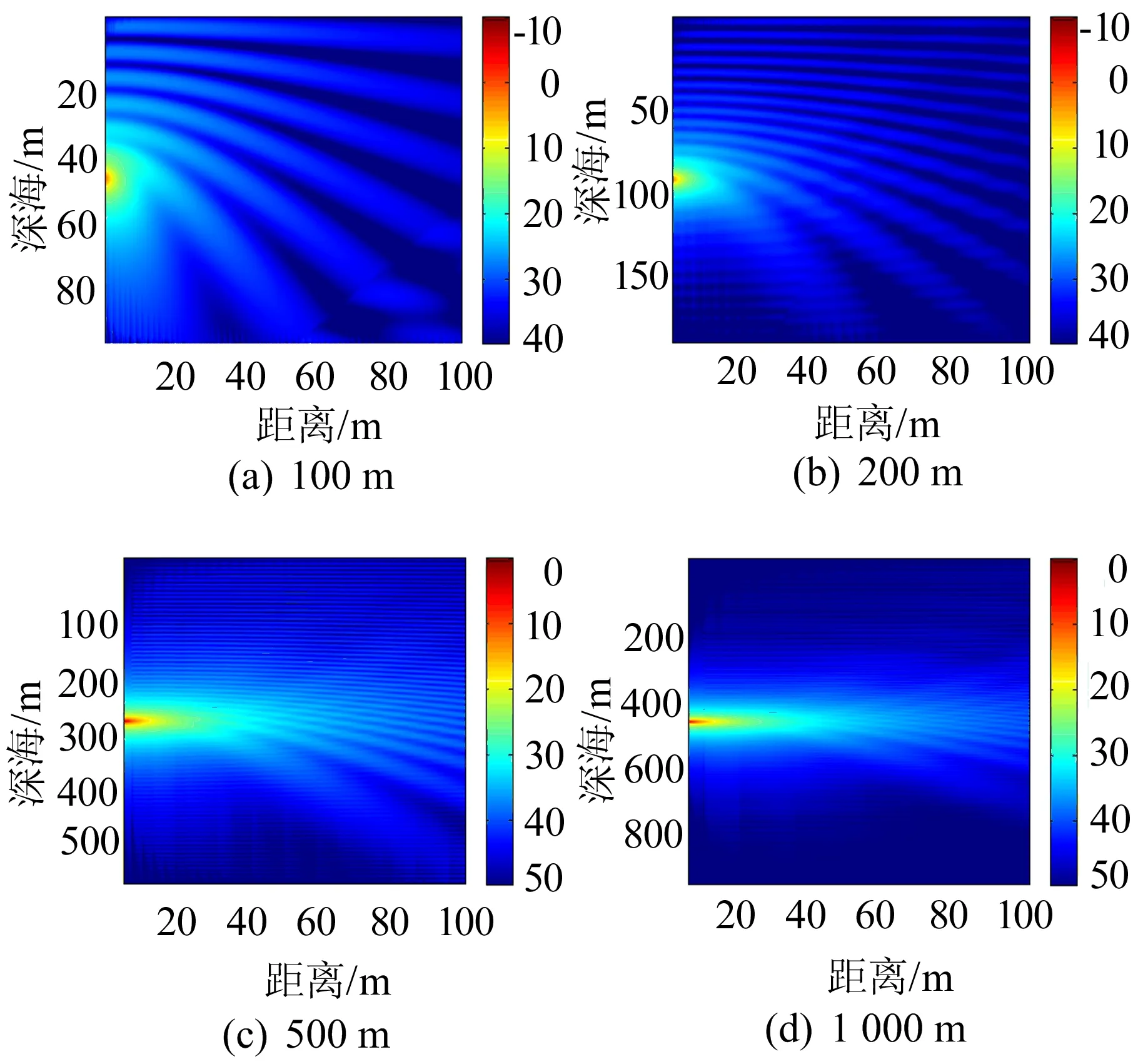
图5 不同海深声场传播衰减图
设测量点距离航行器为100 m,两者位于同一高度,海水和海底的声波速度分别设定为1 500、1 650 m/s,水媒质密度为1.03 g/cm3,泥沙质海底的密度为1.75 g/cm3,声波在泥沙里的传播衰减约为单位波长距离衰减0.85 dB,航行器模拟声源为140 dB,信号带宽为20 Hz~1 kHz,在不同海深时,测量结果如图6所示。
从图6可以看出,当海深在200 m以内时,海底海面对辐射噪声测量的影响较大。在仿真的浅海环境下,得到的噪声测量结果误差可达1.8 dB。当海深不断变深时,波导边界带来的影响逐渐减小,测量结果也逐渐趋于真实值。
图6 不同海深时航行器噪声测量结果
4.2 声源位置的影响
在航行器辐射噪声的实际工程测量中,一方面航行器下潜深度会受到自身结构强度的限制;另一方面水下噪声测量设备如果放置在深海位置处进行测量,往往会产生线缆缠绕、信号传输困难、测量设备随海流漂移等问题。
因此,工程中实际进行航行器噪声测量时,声源和测量设备的位置通常是在水体中上部,此时航行器辐射的噪声就不可避免地受到波导边界的影响。
设在200 m深的海域,水体波导参数不变,当航行器位于水体不同深度位置时,其辐射噪声声场如图7所示。

图7 航行器位于不同海深的辐射噪声声场
从图7可以看出,当声源位于水体中不同深度位置时,波导边界对声线传播都会有影响,当声源靠近波导边界,声线中部分能量沿着靠近边界向前传播,从仿真结果来看,海面边界对声线的影响比海底大。当水听器位于水体中间深度时,测量航行器在不同深度位置处辐射的噪声,结果如图8所示。

图8 不同声源位置时航行器噪声测量结果
从图8可以看出,当航行器靠近海面或海底时,辐射噪声测量结果与真实值偏离较大,最大可达1.5 dB以上;当航行器位于水体中间深度附近时,测量结果接近真实值,此时误差较小。
4.3 水体声速梯度对测量的影响
海洋中的声速梯度是实时变化的,不同海域的声速剖面往往不同,不同的季节甚至一天中的不同时辰水中声速剖面也会有变化[11]。而声场中声线的传播与声速有密切关系,因此需要深入研究在不同的声速剖面下,波导环境对航行器辐射噪声测量结果的影响。根据声速剖面的典型分类,分别有正声速梯度、负声速梯度和等声速梯度,如图9所示。
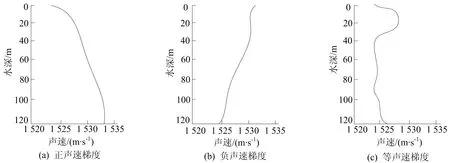
图9 3种典型的声速梯度分布
同样假设海底声速为1 650 m/s,海深120 m,波导环境参数不变,使用垂直阵对航行器辐射噪声进行测量,可得不同频率时接收水听器的测量结果,见表2所列。

表2 不同声速梯度时航行器噪声测量误差 dB
从表2可以看出,不同声速梯度对航行器噪声测量有一定的影响。因此在实际工程中,测量航行器辐射噪声时,应根据测试海域的声速梯度情况对航行器噪声测量结果进行误差修正。
5 结 论
本文通过对水体波导环境、航行器和垂直阵列的仿真,研究了水体环境对航行器辐射噪声测量的影响,得出以下结论:
(1) 波导环境对航行器测量结果有一定影响,尤其是在仿真的浅海环境中,海底海面对声线反射较强,航行器辐射噪声测量结果的误差可达1.8 dB,随着海深增加,误差不断减小。
(2) 航行器位于水体中不同深度进行测量时,测量结果会有差别,因此在实际工程中测量航行器辐射噪声,就需要对航行器和测量设备准确定位。另外当航行器位于水体中间深度位置时,测量结果的误差相对较小。
(3) 声速剖面图作为重要的水文特征,不同声速梯度时,航行器辐射噪声的声场也不一样,因此在工程中对航行器辐射噪声进行测量时,需要对海域的声速梯度进行测量。在仿真的波导环境中,不同声速梯度剖面下航行器噪声测量结果与真实值的差值在1.5 dB以内。
猜你喜欢
高技术通讯(2022年12期)2022-03-23 07:33:24
声学技术(2020年6期)2021-01-08 08:31:54
测控技术(2018年5期)2018-12-09 09:04:36
测控技术(2018年6期)2018-11-25 09:50:34
测控技术(2018年4期)2018-11-25 09:47:16
Journal of Oceanology and Limnology(2018年3期)2018-07-11 01:58:40
优雅(2017年3期)2017-03-09 17:02:52
中学生数理化·八年级物理人教版(2016年7期)2016-12-24 09:46:57
沈阳工业大学学报(2016年2期)2016-09-15 02:00:54
航空学报(2015年4期)2015-05-07 06:43:32