
一种基于RANSAC算法的无人机图像校正方法
2020-09-02 07:19梁强
福建质量管理 2020年15期
梁 强
(广东工业大学土木与交通工程学院 广东 广州 510006)
一、数字图像相关性
数字图像相关测量方法(DIC)[1][2]的基本原理是通过追踪物体表面的散斑图像,实现变形过程中物体表面三维位移的测量。在相关算法运行之前,各取大小为m×m的子区域,这个子区域中心为所感兴趣的像素点。在图像移动的过程中,定义相关系数C(f,g),通过改变△x和△y的值,即在变形后图像上移动子区域,可以得到不同的C(f,g)值。使得C(f,g)取得最大值对应的△x和△y即是子区域中心点P(x,y)的位移,该公式求得的是物体表面的整像素位移值。目标点变形前后坐标关系如下:
x′=x+△x
y′=y+△y
(1)
要得到变形前后图像待测点的位移矢量,就要找到与变形后图像中与参考子区最相似的目标子区。引入相关函数C(f,g)用于评价变形前后图像子区相似程度。通过改变△x和△y的值在变形后图像上搜索与参考子区相关函数C(f,g)为极大值的子区即为待求的目标子区。本文选用计算变形前后图像子区相关系数的公式如下:
(2)
式中,f,g分别为参考子区和变形子区图像像素的灰度分布值;A为子区的面积;相关值C的大小随△x,△y而变化,0≤C≤1;当相关函数取得极大值时,输出的结果(△x,△y)就是待测点变形的像素位移矢量。
二、单应性变换

(3)
像素点用齐次坐标表示,展开式得到对应一组参考点的单应性变换关系如下:
(4)
式在比例因子s≠0下成立。等式中由于使用了齐次坐标,单应性矩阵可以利用h33归一化,得新的单应性矩阵,其中h33=1。那么单应性矩阵就变成了仅有8个自由度的矩阵。由式得到第i组对应参考点之间的映射方程如下:
(5)

(6)
三、RANSAC算法
RANSAC算法的基本思路为:首先选择出可以估计出模型的最小数据集(对于直线拟合来说就是两个点,对于计算Homography矩阵就是4个点),之后使用这个数据集来计算出数据模型;接下来将所有数据带入这个模型,计算出代价函数;第四步,比较当前计算代价函数和之前代价函数的大小,记录较小代价函数对应的模型参数;最后一步,重复1-4步,直到迭代结束或者当前模型已经足够好了(代价函数小于预先设定阈值)。[4][5]
代价函数f(x)通常取:
(7)
迭代次数k通常由下式进行确定:
(8)
其中P为置信度,通常取0.995。“内点”的概率t是一个先验值,通常使用自适应迭代次数的方法计算。即开始设定一个无穷大的迭代次数,然后用当前“内点”数量和预计结果的比值作为t来估计出迭代次数。
四、实验结论
将RANSAC算法运用在单应性变换方法进行图像校正,利用VS2015和Opencv自编程相应程序进行数据处理论证两种方法的准确性。得出控制点变换以及改进方法的实验结果如图2所示。
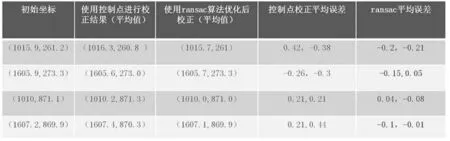
图1 两种方法的比较以及误差分析
由图1可知,RANSAC算法的图像校正比控制点变换的平均误差更加小,在4组实验当中该方法显得更加精确稳定。其值接近于初始坐标。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
红领巾·萌芽(2019年8期)2019-08-27
海峡姐妹(2017年12期)2018-01-31
中国与非洲(法文版)(2017年10期)2017-11-23
作文与考试·初中版(2017年12期)2017-04-19
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
CHIP新电脑(2016年3期)2016-03-10
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
