有限转角旋转电枢式永磁同步电动机设计
2020-08-31 13:37陈益广史翊辰沈勇环
天津大学学报(自然科学与工程技术版) 2020年11期
陈益广,史翊辰,沈勇环
有限转角旋转电枢式永磁同步电动机设计
陈益广,史翊辰,沈勇环
(天津大学电气自动化与信息工程学院,天津 300072)
为降低运行噪声,提升仿生鱼腰关节驱动用电动机(简称腰电机)无故障工作时间,降低维护成本,腰电机采用直驱方式,且还应轻质高效.根据仿生鱼鱼体尺寸、鱼体结构及鱼尾的拍动模式,结合流体力学理论,对仿生鱼尾鳍部分进行了力学分析.根据腰电机的安装位置、旋转角速度及尾鳍受力,计算得腰电机的输出转矩和输出功率要求.由于电机转矩与气隙处直径的平方成正比,故针对腰电机低速大扭矩设计要求,选择外转子电机结构形式;但是,考虑到安装空间的限制,以及腰电机运行角度有限的特点,提出了一种有限转角旋转电枢式永磁同步电动机用作腰电机,即通过变换传统外转子永磁同步电动机拓扑结构,将传统的永磁外转子变换为定子,将传统的定子电枢改为在有限转角内旋转的转子电枢,在克服安装空间受限的同时增大了电机单位体积的输出转矩.运用有限元方法对一台54槽60极有限转角旋转电枢式永磁同步电动机进行了电磁设计,通过选取合适的齿宽达到腰电机轻质高效的设计目的.根据实际运行工况,分析了腰电机在仿生鱼尾部拍动频率为0.35Hz时的运行效率为75.5%,满足不低于75%的设计要求.最后,对腰电机样机进行了寿命试验.结果表明:该电机满足仿生鱼腰关节驱动设计要求,且运行效率较高.
永磁同步电动机;有限转角;旋转电枢;运行效率
仿生鱼作为人类探索、开发海洋的设备,具有噪声低、对环境扰动小等特点,是近年来水下推进器的研究热点之一[1-2].从仿生学角度看,鱼类推进方式大多为身体/尾鳍推进模式(body and/or caudal fin,BCF)[3].在此模式下,鱼类通过鱼体弯曲形成延至尾鳍的推进波,使尾鳍产生较大游动推力.
对于仿生鱼的电驱动研究,国内外研究较少.文献[4]认为尾鳍驱动电机的驱动力矩包含水动力矩和惯性力矩两部分.文献[5-6]给出了仿生鱼直线运动时电机的位置角情况.而对于仿生鱼高效驱动电机设计,国内外鲜有涉及.
提高仿生鱼驱动电机运行效率,可以延长仿生鱼水下作业时间,对水下环境执行任务等具有重要意义.对于采用BCF模式的由鱼体、尾柄和尾鳍构成的三节仿生鱼驱动系统,尾柄和尾鳍各需要一台双轴伸输出的有限转角装置驱动,尾柄驱动装置安装在鱼体躯干后端;尾鳍驱动装置安装在尾柄内,其旋转轴在尾柄后端.
本文围绕一台不经任何减速和传动机构直接驱动仿生鱼尾柄的腰关节永磁同步电动机设计展开分析.从电机设计要求[7]、提出电机拓扑结构、电机电磁设计以及电机运行效率等方面对腰电机的设计方法进行了详细分析.有限转角旋转电枢式永磁同步电动机用作腰电机驱动尾柄,能够满足轻质高效和安装空间限制等设计要求.
1 仿生鱼解析模型
1.1 鱼体简化模型

尾鳍和尾柄以相同频率拍动,且

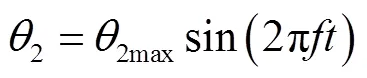
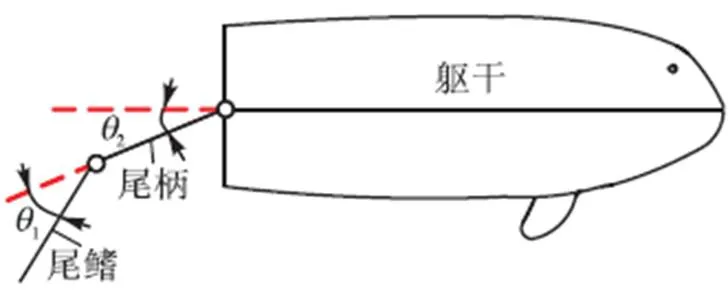
图1 仿生鱼简化模型
尾鳍和尾柄的拍动角速度为


根据文献[8],由茹科夫斯基升力定理,尾鳍受力符合平板绕流受力情景,尾鳍受到的升力为
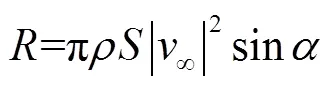
式中:为尾鳍受到的升力,N;为流体密度,kg/m3;为尾鳍面积,m2;为相对于尾鳍无穷远处的流体速度,等价于在静态流体中压力中心点的速度,m/s;为流体对平板的冲角,rad.流体中尾鳍受力分析图如图2所示.升力方向与来流方向垂直,且升力作用中心点位于尾鳍前端1/4处.
1.2 鱼体动力学分析
若认为鱼体沿水平方向游动的动力来源于尾鳍上下拍打时与流体作用产生的升力,从动力学角度来看,该升力与鱼体参数有关.本文仿生鱼体设计参数列于表1中.
表1 仿生鱼设计参数

Tab.1 Parameters of biomimetic fish
由式(5)可知,尾鳍压力中心点的速度对于升力求解十分关键.当尾鳍或尾柄位于图1中参考线下方时,位置角为负值,压力中心点处的速度沿水平和竖直方向分量[9]分别为


对于本文中的仿生鱼,认为鱼体沿水平方向游速与尾鳍拍动频率的关系[10]为

由式(6)和式(7)可得到压力中心点处速度

将式(9)代入式(5),得到尾鳍受到的升力
1.3 腰电机力矩分析
由式(6)~式(10)可得到尾鳍的受力情况,进而由图3可推导出腰电机所应输出的力矩


腰电机上的惯性力矩为


综上,腰电机应输出转矩为
腰电机应输出功率为

由仿真结果可见,尾部每拍动一个周期,腰电机的输出转矩变化一个周期,输出功率变化两个周期;尾柄转速和转矩虽然周期一致,但是存在相位差,故每个功率变化周期都存在一段瞬时功率为负的较短时间,在这较短时间内出现腰电机能量回馈过程.腰电机在两种拍动频率下的峰值转矩和峰值功率列于表2中.
表2 两种拍动频率下腰电机运行数据

Tab.2 Operation data of waist motor under two flapping frequencies
2 有限转角旋转电枢式电机设计
2.1 有限转角旋转电枢式结构
受安装空间约束,腰电机外径和轴向长度限制在540mm和200mm内,整体质量低于125kg,且腰电机运行效率要高,使仿生鱼具备更长的巡游时间.控制器由电池供电,电池标称电压为270V.
腰电机转速低、铁耗低,永磁体可以表贴,使得极对数应尽可能取得多;瓦形永磁体薄,极弧宽度窄且与齿宽接近,永磁体利用率高;兼作机壳的永磁定子轭部薄,使气隙处直径较大,机壳轻;电枢绕组采用槽数比极数少的分数槽集中绕组[13],绕组端部短,在轴向空间一定时电枢铁心轴向叠长能做到最长,在增大转矩同时端部铜耗小、效率高.
腰电机横截面如图5所示.其中,兼做腰电机机壳的永磁定子轭采用导磁的钢材,电枢铁心采用高磁感硅钢片,端盖和电枢转子支架都采用铝合金,钕铁硼永磁体牌号为N38UH.
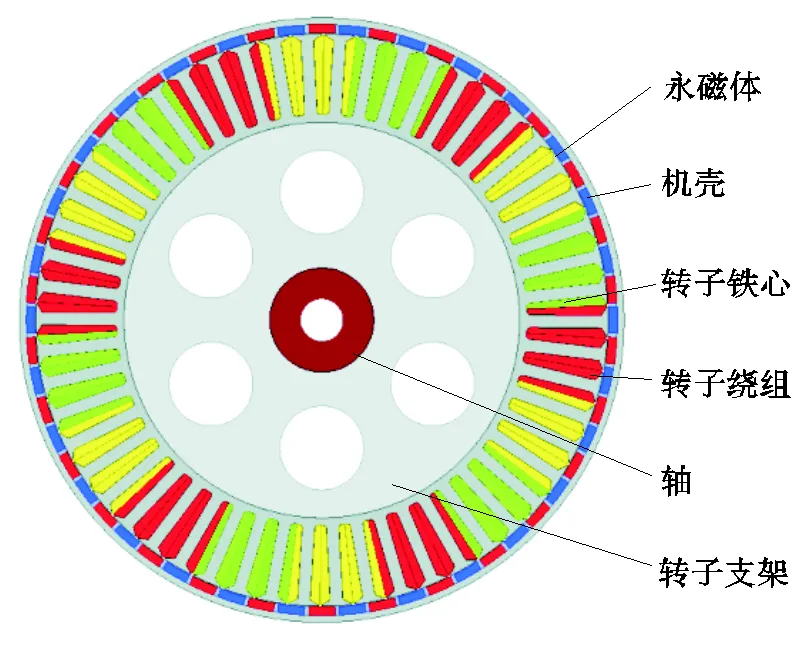
图5 有限转角旋转电枢式电机横截面
在腰电机设计时,对峰值转矩和转速留有一定裕度,所设计的54槽60极有限转角旋转电枢式永磁同步电动机基本参数如表3所示.
表3 腰电机设计参数

Tab.3 Parameters of waist motor
2.2 电枢铁心齿的设计
电机的结构型式、槽极配合和基本尺寸确定后,在输出转矩一定时,电机的轻质高效设计工作转化成电枢铁心齿宽与槽宽的合理分配问题.
电枢铁心齿距一定时,齿宽大小关系到齿部磁密饱和程度、铁心质量和铁耗;同时也关系到槽宽大小,影响着电枢绕组铜线质量和铜耗.虽然腰电机极数多,但转速低,最高工作频率仅8Hz,因此电机铁耗很低,腰电机的损耗主要为铜耗.故齿部磁密可以比一般电机高,使得槽面积大一些,以降低导线电流密度,减少铜耗,提高电机效率.

图6 齿部最大磁密、电机质量与齿宽关系曲线


图7 电机效率与齿宽关系曲线
综合磁密、质量、效率及加工工艺因素,所设计的腰电机空载电动势波形如图8所示.
设计方案的一些关键参数为:永磁体极弧系数0.867,齿宽11mm,齿部最大磁密1.72T,轭部最大磁密1.42T,气隙磁密均值0.84T,峰值负载时线圈电流密度3.22A/mm2,总质量124.4kg,转子转动惯量3kg·m2,效率74.15%,输出转矩脉动2.1%.
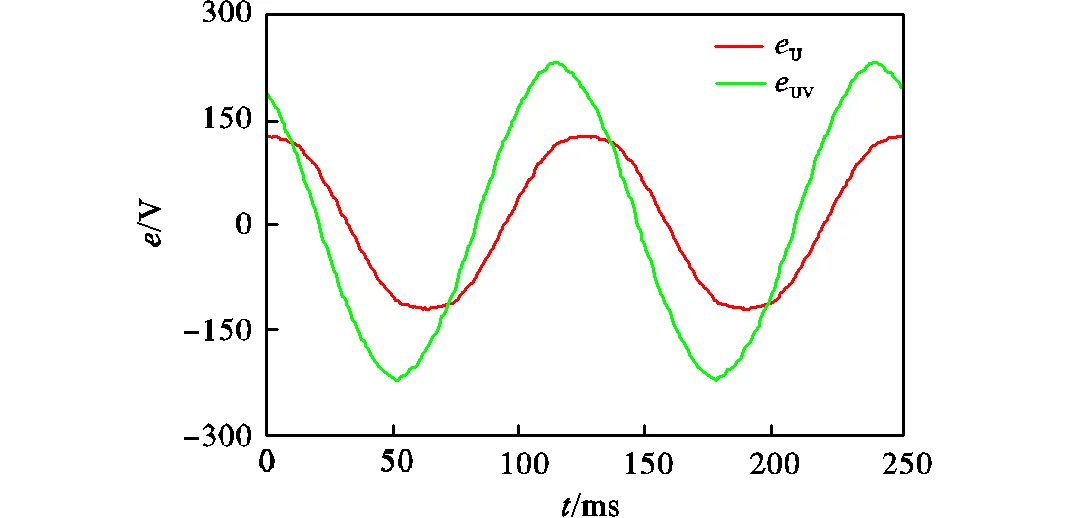
图8 腰电机空载电动势波形
3 电机效率分析
3.1 腰电机效率云图
腰电机运行时采用直轴电流为零(i=0)控制方式.考虑到腰电机损耗主要来自于绕组铜耗,其次是铁耗.其中电枢绕组铜耗计算式为

铁耗计算式[17]为

由于腰电机转速很低,风摩损耗、轴承摩擦损耗可忽略不计,腰电机效率计算式为

综上可得到图9所示的腰电机效率云图.
由图9可见,转矩较低转速较高时效率较高,这时,输出功率相对较高,电流较小,铜耗与铁耗接近,符合电机内部可变损耗与不变损耗相同时,电机效率最高的原则.腰电机最高效率已达88%.

图9 腰电机效率云图
3.2 仿生鱼运动时腰电机运行效率
相比于某一工作点的效率,更具实际价值的是仿生鱼运动时腰电机的运行效率[18].运行效率的高低决定仿生鱼每次投放后在水中巡游时间的长短.
在工作时间内,腰电机铜耗能、铁耗能分别为

式中n为腰电机的极对数.
在内,腰电机损耗能量、输出能量和运行效率分别为

仿真可得,鱼尾拍动频率0.35Hz时,在30s内腰电机铜耗和铁耗能量如图10所示,损耗能量与输出能量如图11所示.
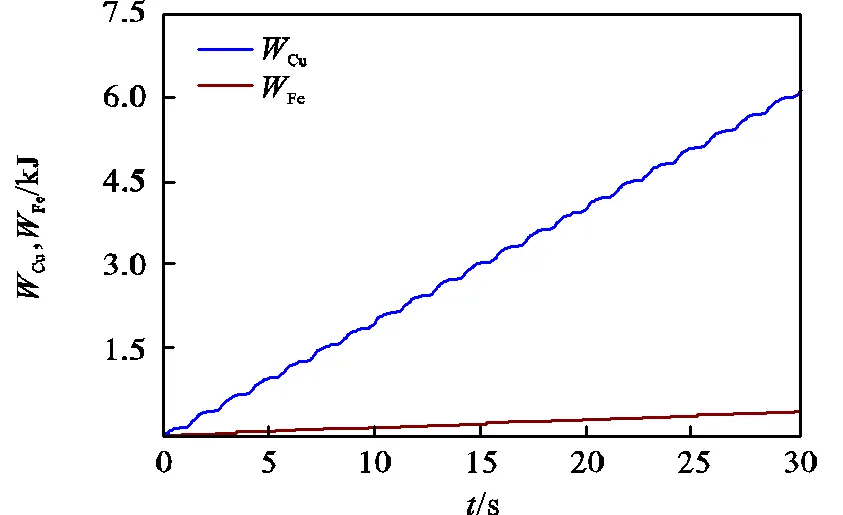
图10 腰电机铜耗和铁耗能量

图11 腰电机损耗能量和输出能量
由图11可见,能量损耗曲线在任意时刻的斜率皆为正值,而输出能量曲线存在斜率为负的时段,这与图4(d)中存在能量回馈过程相一致.经计算,拍动频率为0.35Hz时,腰电机运行效率为75.5%.满足该拍动频率下不低于75%的设计要求.
当尾部拍动幅值一定时,经过不同拍动频率下的运行效率计算得到的腰电机运行效率随尾部拍动频率变化关系曲线如图12所示.由图12可见,腰电机在0.1~0.4Hz的运行频率范围内,运行效率先增加后下降,在0.17Hz时达到最大值81.45%.
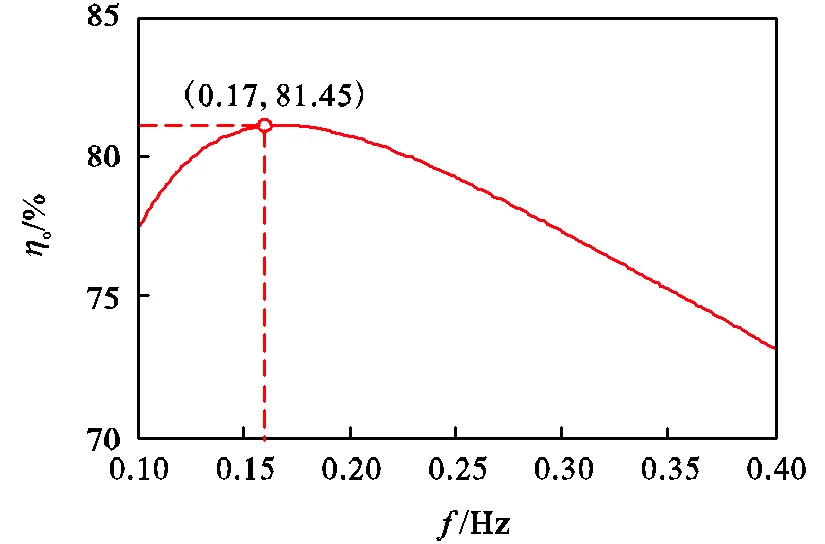
图12 腰电机运行效率与尾部拍动频率关系曲线
4 样机试验
图14为寿命试验平台示意,腰关节电机为双轴伸输出,轴伸两侧对称布置.样机固定在支撑盘上,轴伸一侧各设备的联接顺序依次为转矩转速传感器、升速机、飞轮和磁粉制动器.为便于安装样机,与转矩转速传感器间使用了带有中间轴的膜片弹性联轴器.使用传动比为10.83的升速机,大幅降低飞轮体积,降低磁粉制动器额定转矩.磁粉制动器采用水冷方式.添加飞轮后,使得样机整个轴系的转动惯量为68kg·m2,与仿生鱼的等效转动惯量基本相同.试验时,由控制器控制腰电机转子角位置正弦规律变化.两个磁粉制动器线圈串联由直流电源通入电流,调整电流改变磁粉制动器的制动转矩,给样机轴伸两侧施加相同恒定阻转矩.样机的转矩和转速由转矩转速传感器测得.
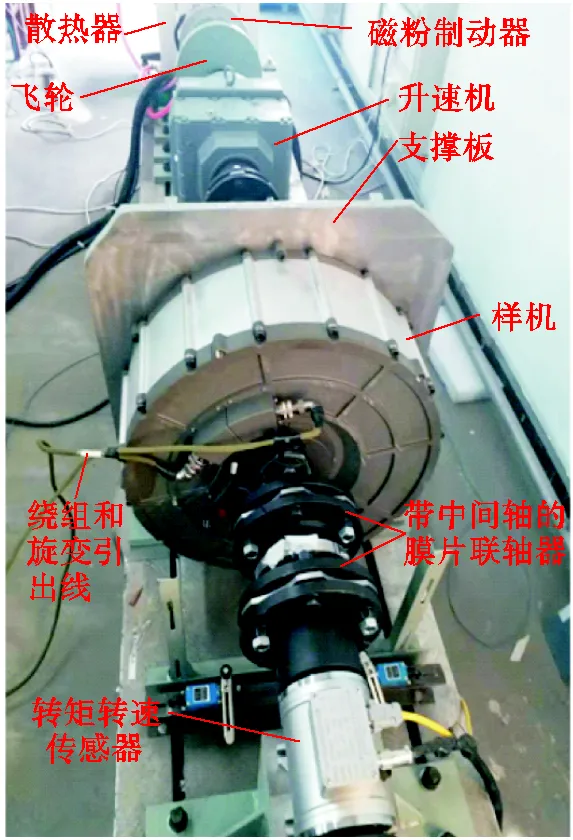
图13 腰电机寿命试验平台(局部)


图14 样机寿命试验平台示意
表4 腰电机寿命试验时的运行效率

Tab.4 Operation efficiency of waist motor during life test
由表4可见,在恒定阻转矩作用下,样机实测运行效率值与采用电机效率云图数据计算得到的理论值比较接近.试验结果说明样机设计与效率分析方法可行.
5 结 论
(1) 以仿生鱼动力模型为设计依据,对仿生鱼腰关节用永磁同步电动机采用有限转角旋转电枢式结构,能够克服安装空间限制,且增大电机单位体积下输出转矩,满足了低速大扭矩工况需要.
(2) 合适选取电机电枢铁心齿宽,可在满足转矩要求下达到驱动电机轻质高效的设计要求.
(3) 样机试验结果表明电机设计和运行效率分析方法可行,所设计的电机能够满足仿生鱼特定运行频率下的运行效率要求,且在全运行范围内具有较高的运行效率.为仿生鱼高效驱动电机设计提供了方法参考.
[1] 王安忆,刘贵杰,王新宝,等. 身体/尾鳍推进模式仿生鱼研究的进展与分析[J]. 机械工程学报,2016,52(17):137-146.
Wang Anyi,Liu Guijie,Wang Xinbao,et al. Development and analysis of body and/or caudal fin biomimetic robot fish[J]. Journal of Mechanical Engi-neering,2016,52(17):137-146(in Chinese).
[2] 封锡盛,李一平. 海洋机器人30年[J]. 科学通报,2013,58(增刊Ⅱ):2-7.
Feng Xisheng,Li Yiping. Thirty years evolution of SIA’s unmanned marine vehicles[J]. Chinese Science Bulletin,2013,58(Suppl Ⅱ):2-7(in Chinese).
[3] 赵士奇. 仿鱼尾鳍推进系统实验研究[D]. 哈尔滨:哈尔滨工程大学船舶工程学院,2008.
Zhao Shiqi. Experimental Research of a Tail-Fin Propul-sive System[D]. Harbin:School of Ship Engineering,Harbin Engineering University,2008(in Chinese).
[4] 俞经虎,竺长安,朱家祥,等. 仿生鱼尾鳍的动力学研究[J]. 系统仿真学报,2005,17(4):947-953.
Yu Jinghu,Zhu Chang’an,Zhu Jiaxiang,et al. Re-search of steady control of tail fin of robotic-fish[J]. Journal of System Simulation,2005,17(4):947-953(in Chinese).
[5] Arale S,Pawar C,Deshmukh A,et al. Design and manufacture of bio-mimic robotic fish[C]//IEEE Interna-tional Conference on Control,Measurement and Instru-mentation. India,Kolkata,2016:445-448.
[6] Zhong Y,Song J,Yu H,et al. A study on kinematic pattern of fish undulatory locomotion using a robot fish[J]. Journal of Mechanisms and Robotics,2018,10(4):1-11.
[7] 刘 力,陈学永,王晓远. 纯电动轻型车辆电机驱动系统设计[J]. 天津大学学报:自然科学与工程技术版,2016,49(6):659-665.
Liu Li,Chen Xueyong,Wang Xiaoyuan. Design on the motor driving system of pure electric light vehicles[J]. Journal of Tianjin University:Science and Technol-ogy,2016,49(6):659-665(in Chinese).
[8] 郭永怀,陆士嘉. 流体力学概论[M]. 北京:科学出版社,1987.
Guo Yonghuai,Lu Shijia. Introduction to Fluid Mechan-ics[M]. Beijing:Science Press,1987(in Chinese).
[9] 林 海. 仿生机器鱼机构设计及力学分析[D]. 西宁:青海大学机械工程学院,2015.
Lin Hai. Biomimetic Robotic Fish Mechanism Design and Mechanics Analysis[D]. Xining:School of Me-chanics Engineering,Qinghai University,2015(in Chinese).
[10] 喻俊志,谭 民,王 硕. 高机动仿生鱼设计与控制技术[M]. 武汉:华中科技大学出版社,2018.
Yu Junzhi,Tan Min,Wang Shuo. Design and Control Technology of High-Mobility Biomimetic Fish[M]. Wuhan:Huazhong University of Science and Technology Press,2018(in Chinese).
[11] Wang K,Liang Y,Wang D,et al. Cogging torque reduction by eccentric structure of teeth in external rotor permanent magnet synchronous motors[J]. IET Electric Power Applications,2019,13(1):57-63.
[12] 杨定伟,邓兆祥,张河山,等. 永磁轮毂电机磁场解析建模[J]. 电工技术学报,2019,34(7):1423-1433.
Yang Dingwei,Deng Zhaoxiang,Zhang Heshan,et al. Exact analytical solution of magnetic field in permanent magnet in-wheel motor[J]. Transactions of China Electrotechnical Society,2019,34(7):1423-1433(in Chinese).
[13] 陈益广. 永磁同步电机单层分数槽集中绕组磁动势与电感[J]. 天津大学学报,2012,45(9):798-802.
Chen Yiguang. Magnetomotive force and inductance in permanent magnet synchronous machine with single-layer fractional-slot concentrated winding[J]. Journal of Tianjin University,2012,45(9):798-802(in Chinese).
[14] 左曙光,刘晓璇,张国辉,等. 永磁同步电机电磁振动数值预测与分析[J]. 电工技术学报,2017,32(1):159-167.
Zuo Shuguang,Liu Xiaoxuan,Zhang Guohui,et al. Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society,2017,32(1):159-167(in Chinese).
[15] 姜仁华,刘 闯,宁银行,等. 分数槽集中绕组永磁同步电机设计与分析[J]. 南京航空航天大学学报,2018,50(3):329-335.
Jiang Renhua,Liu Chuang,Ning Yinhang,et al. Analysis and design of PMSM with fractional-slot concentrated windings[J]. Journal of Nanjing University of Aeronautics and Astronautics,2018,50(3):329-335(in Chinese).
[16] 李 斌,孙竟成,李 华. 轴向通风永磁同步电机三维热网络模型[J]. 天津大学学报:自然科学与工程技术版,2016,49(11):1161-1166.
Li Bin,Sun Jingcheng,Li Hua. Three dimensional thermal network model of permanent magnet synchronous machine equipped with axial ventilation system[J]. Journal of Tianjin University:Science and Technol-ogy,2016,49(11):1161-1166(in Chinese).
[17] 魏永田,孟大伟,温嘉斌. 电机内热交换[M]. 北京:机械工业出版社,1998.
Wei Yongtian,Meng Dawei,Wen Jiabin. Exchange of Internal Heat in Electric Machines[M]. Beijing:China Machine Press,1998(in Chinese).
[18] Lazari P,Wang J,Chen L. A computationally efficient design technique for electric-vehicle traction machines[J]. IEEE Transactions on Industry Applications,2014,50(5):3203-3213.
Design of Limited Angle Rotational Armature Permanent Magnet Synchronous Motor
Chen Yiguang,Shi Yichen,Shen Yonghuan
(School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China)
To minimize operating noise,increase the mean time between failures of biomimetic fish,and save maintenance costs,the electric motor for driving biomimetic fish waist joint(waist motor)was adopted in a direct-drive mode,which should be light weight and efficient. First,mechanical analysis of biomimetic fish caudal fin was conducted in combination with the hydrodynamics theory based on the fish body size and structure and caudal fin flapping pattern.The waist motor output torque and power were acquired through its installation position,rotational angular velocity,and force on the caudal fin.Because the torque was proportional to the square of the air gap diameter,the external rotor structure was selected to meet the low-speed and high-torque demands.The limited angle rotational armature permanent magnet synchronous motor(PMSM)used as the waist motor was proposed to consider the space constraint of the installation and the restricted operating angle of the waist motor.By changing the external rotor motor topology structure,the traditional permanent magnet external rotor was fixed to use as a stator,and the traditional stator armature was transformed to be rotor armature with a limited rotational angle.Thus,the installation space limitation problem was solved while increasing the output torque per unit volume.Using finite element analysis,a 54-slot 60-pole limited angle rotational armature PMSM was designed.Meanwhile,an appropriate tooth width was selected to achieve the design goal of light weight and high efficiency.Through analysis,motor operation efficiency reached 75.5% when the caudal fin flapping frequency was 0.35Hz,which met the requirement of not less than 75%.Finally,the life test of the prototype was conducted.Results show that the motor with this structure can meet the requirement of waist joint drive and possesses high operation efficiency.
permanent magnet synchronous motor;limited angle;rotational armature;operation efficiency
TM351
A
0493-2137(2020)11-1120-08
10.11784/tdxbz201910021
2019-10-13;
2019-11-19.
陈益广(1963— ),男,博士,教授.
陈益广,chenyiguang@tju.edu.cn
(责任编辑:孙立华)
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
浙江大学学报(理学版)(2022年1期)2022-02-21
防爆电机(2021年5期)2021-11-04
农业工程学报(2021年4期)2021-05-09
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
恋爱婚姻家庭·养生版(2018年11期)2018-11-26