
基于Labview的三容水箱液位控制系统设计
2020-08-24 04:15曹纪中
沈阳化工大学学报 2020年2期
李 凌, 曹纪中, 王 璐
(1.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142;2.沈阳化工大学 计算机科学与技术学院, 辽宁 沈阳 110142)
在很多化工和制造业的工艺中,液位控制是一项重要的测量指标,是衡量产品质量与安全系数的重要考量[1].为模拟实际工业环境中多惯性环节的复杂系统,常用多容水箱作为研究对象,以多容水箱为研究背景,针对水箱模型采用不同的控制方法和控制策略来实现更好地控制效果.目前最常见的针对三容水箱所代表的三阶惯性环节常用的控制方式是独立回路控制和两层串级PID控制[2].独立回路控制是将三容水箱分隔成单容与双容或三个单容,采用独立回路来控制多容水箱;两层串级PID控制是使主回路控制主要控制变量(常为下水箱),副回路控制其他控制变量.虽然目前对三容水箱的控制策略已经逐渐发展,但是其控制效果中动态性能不理想,尤其是调节时间过长,超调量常突破阈值[3].因此需要针对以三容水箱为代表的三阶惯性系统提出新的控制策略.本文采用三层串级PID来控制三容水箱,采用Labview软件进行系统设计.对水箱模型采用机理建模法进行建模,再将模型放入Simulink中,验证其在不同控制方案下的理论可行性并整定PID参数,针对Labview软件的前面板进行设计,实现三容水箱的三层串级PID控制.本文研究验证了针对三容水箱的三层串级控制的可行性;Labview程序界面的编辑更贴近实际设计,这种可视化的仿真成果相比于单独Simulink仿真也更贴近实际环境,对工业中完全自主开发的液位控制具有参考价值.
1 三容水箱数学模型的建立
1.1 水箱系统介绍
水箱系统模型如图1所示,自上而下依次为上、中、下3个水箱,上水箱存在1个输入和1个输出,中、下水箱分别存在2个输入和1个输出,分别使用阀1~6控制.通过改变不同的阀门开关实现不同模型的实现.打开阀6和阀4,关闭其他阀门,可实现对下水箱的一阶模型;打开阀5、阀3、阀4,关闭其他阀门,可实现对中、下水箱的双容水箱的二阶模型;打开阀1、阀2、阀3、阀4,关闭其他阀门,可实现上、中、下水箱的三容水箱的三阶模型.
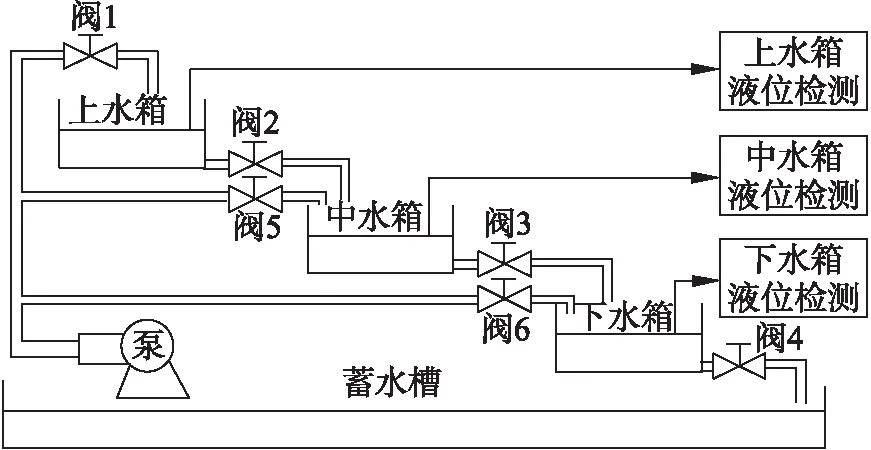
图1 水箱系统模型示意图
1.2 三容水箱机理建模法
针对三容水箱的建模方法采用机理建模法,通过机理分析水箱模型的物理特性,进而得到水箱的传递函数.三容水箱的机理模型如图2所示.
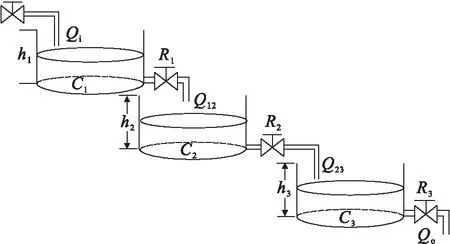
图 2 三容水箱的机理模型
h1、h2、h3分别为上、中、下水箱液位高度;C1、C2、C3分别为上、中、下水箱底面积(液容),R1、R2、R3分别为上中下水箱液阻;Qi为流入上水箱的流量,Q12为上水箱流入中水箱的流量,Q23为中水箱流入下水箱的流量,Qo为下水箱流出的流量.液阻和液容定义为
(1)
(2)
由液阻定义得
(3)
(4)
(5)
由液容定义得
C1dh1=(Qi-Q12)dt,
(6)
C2dh2=(Q12-Q23)dt,
(7)
C3dh3=(Q23-Qo)dt.
(8)
带入(3)、(4)、(5)得
(9)
(10)
(11)
即
(12)
(13)
(14)
两边进行拉氏变换
(R1C1s+1)H1(s)=R1Qi(s),
(15)
(R1R2C2s+R1)H2(s)=R2H1(s),
(16)
(R2R3C3s+R2)H3(s)=R3H2(s).
(17)
解得
(18)
设R1C1=T1,R2C2=T2,R3C3=T3,R3=K3,便可以得到三容水箱的三阶模型
(19)
带入实验辨识后得到的系统参数即可得到三容水箱的数学模型
(20)
2 控制方法与控制策略研究
2.1 控制方法研究
PID控制作为工程中最常用的控制方法,适应于各种控制环节,使用也较为方便.本文主要研究PID控制在液位控制系统中的应用,包含PID控制算法和PID控制器工程参数整定.
2.1.1 PID控制算法
PID控制算法是比例、积分、微分环节的总称.PID控制器的主要优势是其结构比较简单、实现也较为容易,因此PID控制器的使用范围十分广泛[4].PID参数是相互独立的,这使得PID参数整定比较简单,综上所述PID控制器使用非常快捷便利.PID控制器的输入信号与输出信号关系式为
图3为PID控制示意图.

图3 PID控制示意图
2.1.2 PID控制器工程参数整定
PID参数整定的方法主要有经验法、临界比例度法、Z-N参数整定法、Simulink的PID参数自整定等[5].经验法的整定结果较为粗糙,Z-N参数整定法适用于存在明显滞后的自衡对象,这两种方法并不适用于本文的研究对象.本文采用临界比例度法整定PID参数,其步骤为:
(1) 切除I和D,取较小Kc,投入闭环仿真运行.
(2)Kc由小到大测试其变化,对应某一Kc时做小幅度设定值阶跃响应,直至产生等幅振荡.
(3) 设等幅振荡周期为Tcr,控制器的增益为Kcr,采用表1整定PID参数.
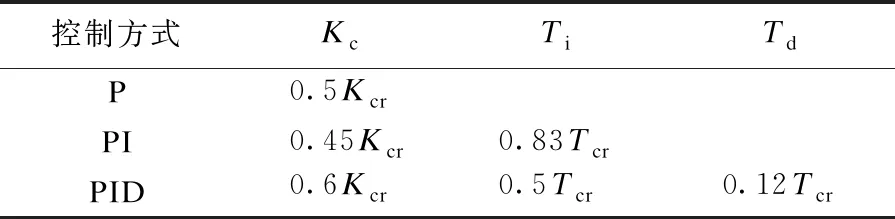
表1 临界比例度法参数表
2.2 控制策略研究
三容水箱作为三阶惯性系统,单回路控制下调节时间过长甚至无法稳定,所以针对三容水箱的控制方法最常用的是串级控制.本文针对三容水箱控制系统也采用串级控制,但不同之处在于采用3个副回路嵌套,使用这种方式来保证主回路的控制效果,其方框图如图4所示,图4中Gp1、Gp2、Gp3分别代表3个被控对象,Gm1、Gm2、Gm3分别代表3个检测变送环节,Gc1、Gc2、Gc3分别代表三个控制器,Gv代表执行器,hsp为设定值.
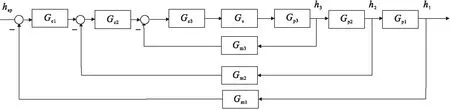
图4 三容水箱方框图
3 基于Simulink的水箱液位仿真
在图1中,将上、中、下水箱都接入系统,便可得到一个三容水箱形成的三阶系统.利用Simulink搭建其框图便可以针对其进行仿真研究.为加强对上、中、下3个水箱的稳态与动态性能的控制,采用1个主回路,2个副回路的3层嵌套式串级控制系统.搭建的Simulink平台如图5所示,平台搭建好后便可对该三层串级系统进行仿真运行.首先仍然是整定一个合适的PID参数,可利用Simulink自身的自整定功能和临界比例度法相结合获得一组合适的PID参数[6],如表2所示.

图5 三容水箱串级仿真

表2 PID参数
在整定了PID参数后,输入一个固定的设定值1(相当于一个阶跃信号),系统将自动跟随设定值直至稳定.在确认稳定后添加一个阶跃扰动(一个阶跃信号值为0.5),再次观察系统跟随能力(抗干扰能力),结果如图6所示.由仿真结果可以看出控制效果较为理想.上、中、下水箱的稳态温差基本为零,动态性能也较好,已经基本满足三容水箱的控制要求.

图6 三容水箱串级仿真曲线
4 基于Labview的水箱液位控制系统设计
在基于Simulink的水箱液位仿真基础上利用Labview软件实现三容水箱的控制系统设计.采用三层嵌套式串级控制策略,PID控制方法.搭建的前面板和程序框图如图7和图8所示[7].
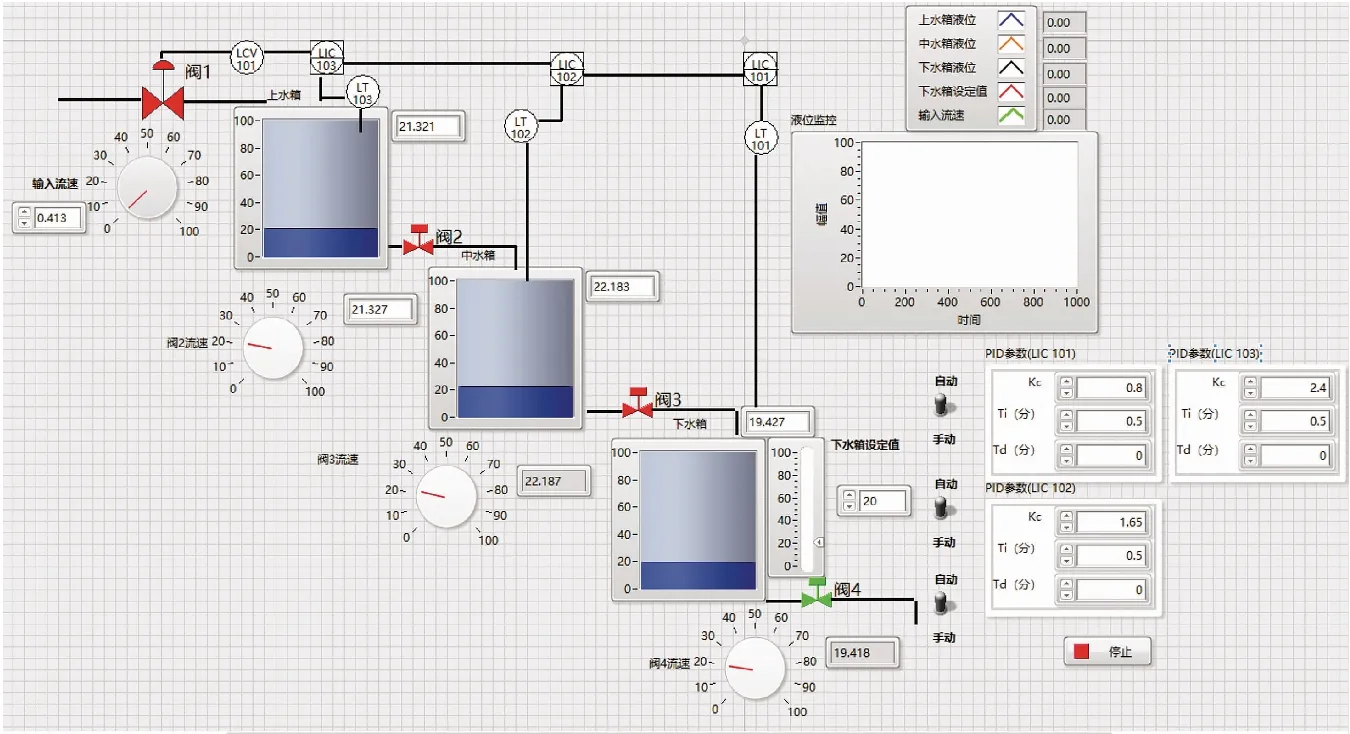
图7 三容水箱液位控制系统前面板
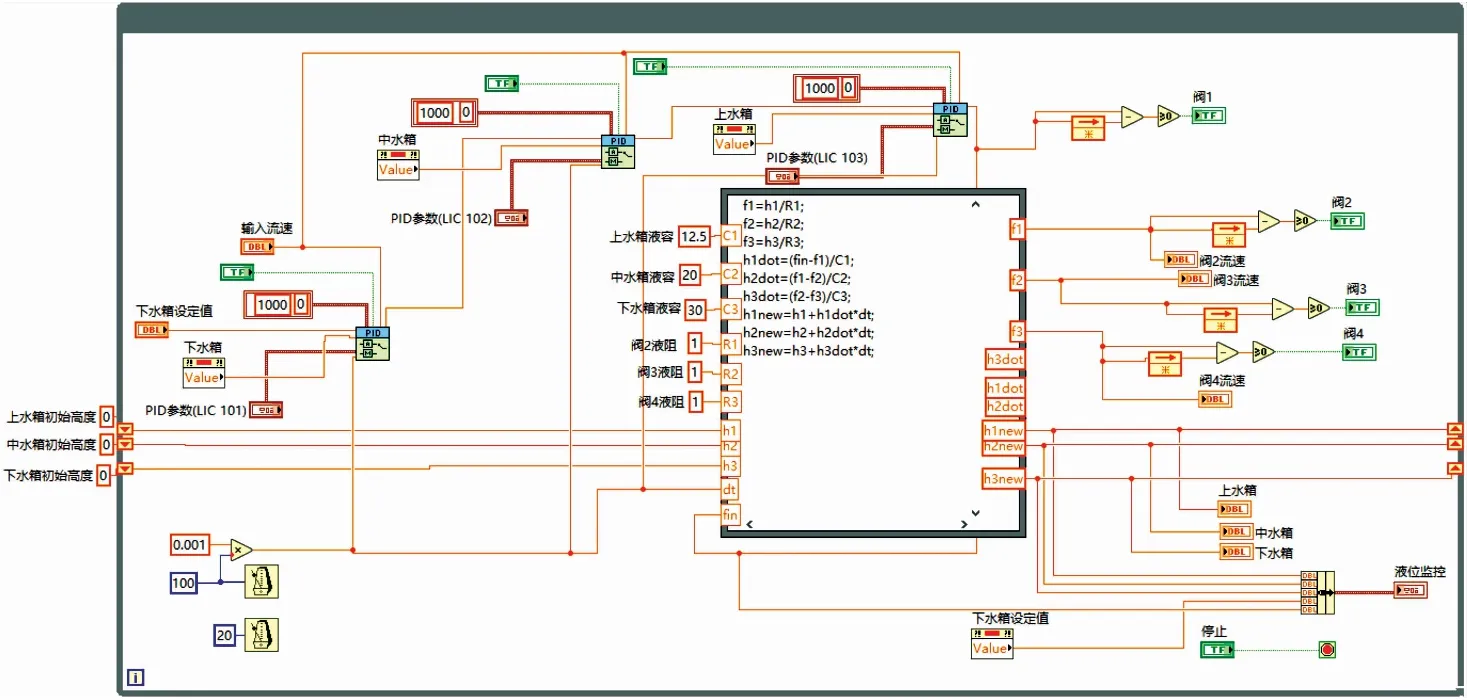
图8 程序框图
通过PID整定参数获得一组最合适的PID参数,如表3所示.
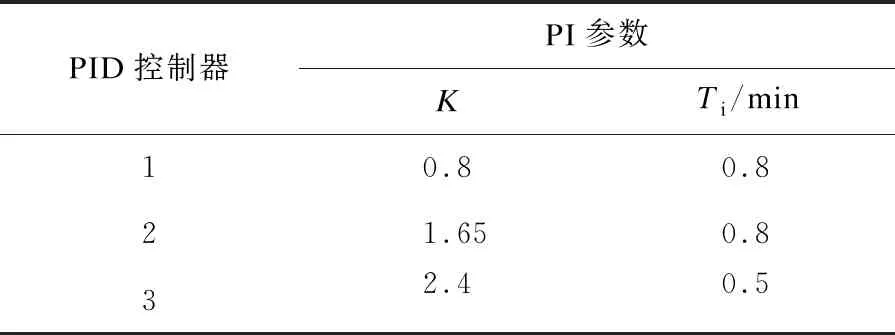
表3 PID参数
在表3的PI参数下,下水箱液位设定值为20 cm,自动投运系统,记录曲线如图9所示,其中最重要的下水箱液位曲线在最下端,可以看到控制效果较好.
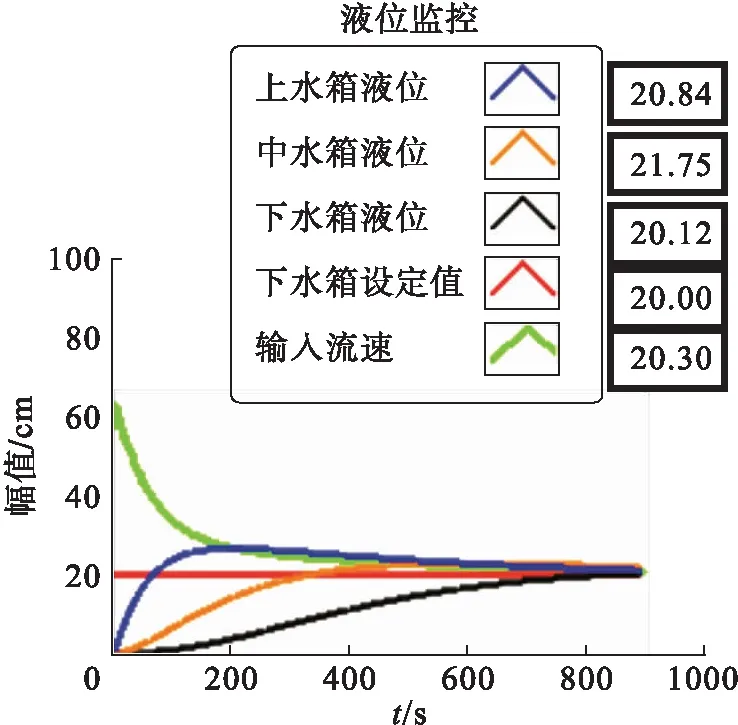
图9 投运曲线
系统稳定后,测试其跟随情况,改变下水箱液位设定值为30 cm,记录曲线如图10所示,其中下水箱液位曲线仍在最下端,跟随效果较好.上、中、下水箱动态性能如表4所示.从表4可以看出系统整体运行动态性能状况良好,无稳态误差.
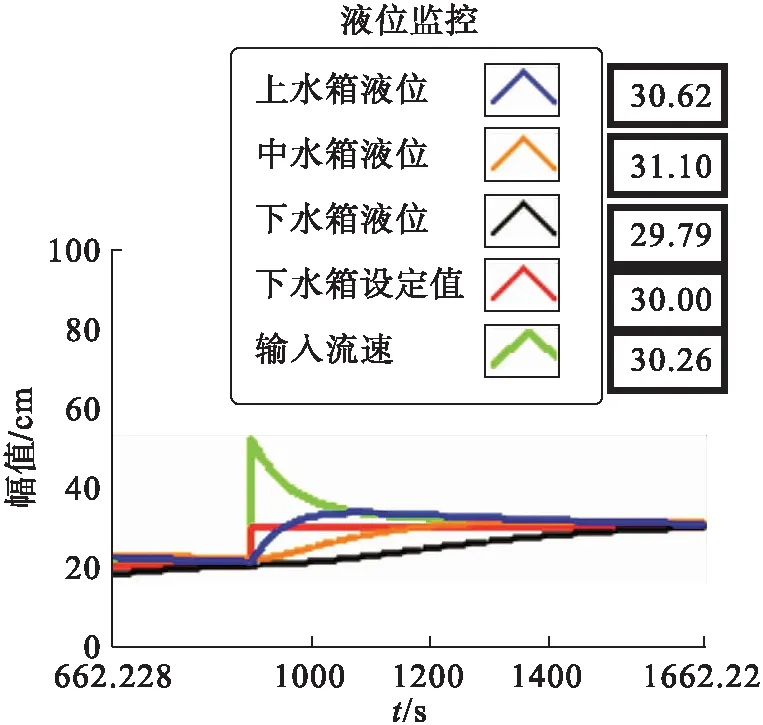
图10 跟随曲线
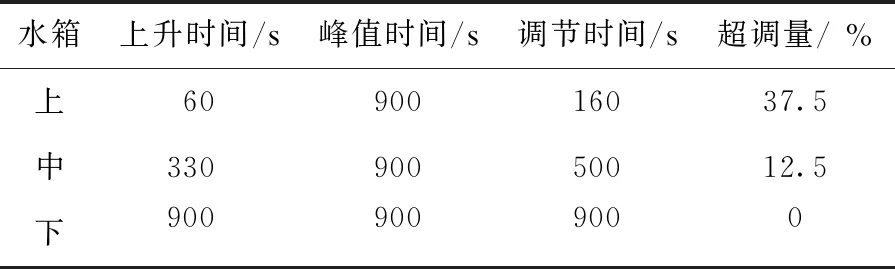
表4 动态性能比较
5 结 论
本文设计了基于Labview的三层串级控制三容水箱系统.从仿真投运结果可以看出:三层串级PID控制系统对三容水箱有较好的控制效果,基于Labview的系统设计符合了设计初衷,有很强的直观性.相比较于已有的针对三容水箱的控制方法,三层串级PID控制较之独立回路控制,其没有割裂三阶系统,同时摆脱了独立回路控制所要求的水箱之间必须是可控制的调节阀的局限性.三层串级控制较之二层串级控制具有更强的针对主回路的保护,使得主回路的控制效果可以得到提升.通过本文研究设计可以得出两条结论:第一是三层串级控制可以有效控制三容水箱,提升系统动态性能,同时对三阶惯性系统的控制研究有一定的参考价值;第二是利用基于数据流和可视化的Labview软件较之传统的组态软件可使控制系统的可视化程度得到提升[8],Labview软件的使用程度还比较低,在可视化操作等方面可以进一步完善.如何在工业系统中实际投运三层串级控制需要进一步研究.
猜你喜欢
应用能源技术(2022年9期)2022-10-22
湖北农机化(2021年7期)2021-12-07
科技与创新(2018年19期)2018-11-30
汽车文摘(2018年7期)2018-07-04
北京航空航天大学学报(2017年4期)2017-11-23
知识文库(2017年21期)2017-10-20
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
汽车维修技师(2016年3期)2016-08-31
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年2期)2015-02-28
