激光前散射与β 射线相融合的颗粒物浓度监测系统★
2020-08-21 05:22王建鹏
机械管理开发 2020年7期
王建鹏
(山西省信息产业技术研究院有限公司, 山西 太原 030012)
引言
近些年,随着我国工业和经济的飞速发展,颗粒物TSP、PM10、PM2.5 对大气的污染日趋严重。目前,国内外常用颗粒物浓度检测方法有滤膜称重法、β射线法、光散射法等。滤膜称重法原理简单,采样定量的气体,空气中的颗粒物附着于薄膜上,采样薄膜前后的重量差,从而求得颗粒物浓度,这种方法结果也比较可靠,但检测周期过长;β 射线法利用纸带上颗粒物对β 射线的吸收,通过前后衰减程度计算出颗粒物浓度,该方法测量准确度高、易维护但测量结果间隔较长不能做到实时监测;光散射法通过光通量平均值与颗粒浓度之间的线性关系确定颗粒物浓度的大小,光散射法检测的实时性高,但在测量精度上达不到滤膜称重法和β 射线法的水平。为了实现对颗粒物污染高精度实时监测,依托山西省重点研发计划项目(201903D321074),设计一套激光前散射与β 射线相融合的颗粒物浓度监测系统,系统中引入卷积神经网络的污染源图像识别技术,在对颗粒物浓度实时监测的同时实现了对污染源图像的识别和上传。
1 设计方案
系统框架如图1 所示。系统基于ROS 系统开发,在监测区域内呈一卫多星式分布,建立基于LoRa 的无线局域网作为信息通道,以一个数据核心处理系统为Master 节点,以其他数据采集子系统作为其卫星节点,通过Master 节点的控制与调度,完成区域内数据的采集、传输及预处理等功能[1-2]。利用数据采集子系统中激光前散射测量装置获得扬尘的顺时相对变化,利用β 射线法测量装置检测颗粒物的小时浓度,并用小时值校准顺时值,获得高分辨的实时颗粒物浓度。当环境污染达到警戒值时,由球机对周围环境进行扫描拍照,通过图像分析将污染源和非污染源的图像进行分类,并将污染源图像上传。
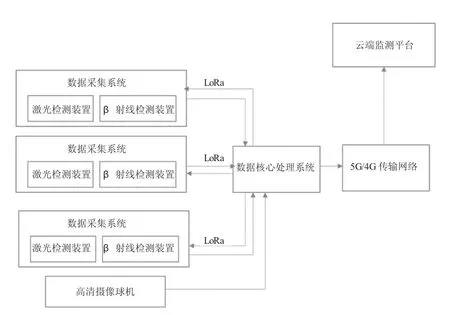
图1 系统结构
2 数据采集系统
2.1 激光前散射检测装置
空气中颗粒物检测采用基于激光前散射的检测技术,光源发出的光束通过含有待测颗粒物的测量区域,发生光的散射,散射光从颗粒物向不同方向发生散射,前向散射的光被光电传感器接收,激光光强信号转换成电流信号,通过调理电路进行I.V 转换、放大、滤波后输入A/D 转换,由串口送入工控机。如下页图2 所示。
2.2 β 射线检测装置
装置结构如下页图3 所示,由采样入口、滤纸、气路组成气体采样系统,进行样本气体采集[3]。由低能量β 射线源在颗粒物采集前后穿过清洁滤纸和采集有颗粒物的滤纸,根据两次β 射线被吸收的变化量来求得搜集在滤纸上的颗粒物的质量。由处理终端进行系统控制和数据处理。

图2 激光前散射检测装置
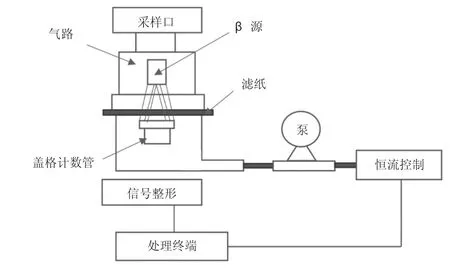
图3 β 射线检测装置结构
利用β 射线法检测装置检测颗粒物的小时浓度,并用小时值校准激光前散射检测装置,从而获得高分辨的实时颗粒物浓度。
3 通过卷积神经网络算法识别污染源图像
当环境污染达到警戒值时,由球机对周围环境进行扫描拍照, 通过图像分析将污染源和非污染源的图像进行分类,并将污染源图像上传。具体实现方法如下:
1)收集样本集,包含存在污染源对象的图片和不存在污染源对象的图片作为训练样本,并进行标注产生分类标签。
2)建立卷积神经网络结构,如图4 所示。

图4 卷积神经网络结构
图像由RGB 3 个通道输入,经过32@7×7,64@5×5,128@5×5 的卷积核进行特征抽取,卷积层与卷积层之间加入2×2 的max pooling 层,最后由1024 的全连接层进行输出分类[4-5]。
3)训练网络参数,训练过程中的损失函数选用交叉熵损失函数,如公式(1)所示。

式中:m 为样本数量;y 为样本类别指示变量;h 为样本类别的预测概率。选用AdamOptimizer 作为参数优化器,训练权重为0.000 1。网络权重初始值为标准差为0.1 的截断正态分布,初始偏置值为0.1。训练后,神经网络图像识别准确率如图5 所示。

图5 训练曲线
由曲线图可以看出经训练后的卷积神经网络对图像识别的准确率达到97%。
4 结语
颗粒物浓度监测系统是基于ROS 节点式设计的,可实现一卫多星式部署,同时,采用激光前散射与与β 射线相融合的检测方式,达到了兼顾准确性和实时性的目的,并引入卷积神经网络对污染源进行识别,由训练曲线看出分类精度高达97%。
猜你喜欢
环境保护与循环经济(2021年7期)2021-11-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
环境影响评价(2020年2期)2020-12-02
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
建筑热能通风空调(2018年5期)2018-07-09
中国资源综合利用(2017年4期)2018-01-22
青海政报(2017年6期)2017-07-24
中成药(2017年3期)2017-05-17
中学生数理化·八年级物理人教版(2017年12期)2017-04-18
中国塑料(2016年9期)2016-06-13