
大深度同振式矢量水听器耐压结构设计
2020-08-12 08:21:58王文龙孙芹东张小川
压力容器 2020年7期
王文龙,王 超,孙芹东,张小川
(1.海军潜艇学院,山东青岛 266199;2.海洋科学与技术国家实验室,山东青岛 266235)
0 引言
同振式矢量水听器是一种能够直接测量水下声场矢量信息的声学接收换能器,具有低频性能好、灵敏度高等特点,单个矢量水听器即可测定声源目标的方位;它还具有体积小、功耗低、抗各向同性噪声、可分辨多目标等优点,非常适合在水下滑翔机、智能浮标等小型水下无人平台上应用[1]。随着耐压技术的发展,各种水下无人平台的工作深度越来越大,如天津大学的“海燕-Ⅱ”型滑翔机已经能够连续进行1 500 m深度的剖面滑翔[2],中船重工710所的“HM-2000”型智能剖面浮标能够在0~2 000 m深度自由浮沉,已被国际Argo计划接纳,并正式用于全球Argo实时海洋观测网中[3]。因此,当前矢量水听器耐压能力不足成了制约其在大深度水下无人平台上应用的主要因素。
在国外,美国和俄罗斯一直走在大深度矢量水听器研究和应用领域的前列。早在1988年,美国海军的研究小组在南太平洋5 500 m深处进行了矢量水听器的声学试验[4]。美军海军研究办公室于2006年使用铝合金外壳的矢量水听器在6 000 m 深度进行了可靠声路径测量[5]。1989年,俄罗斯在南中国海3 600 m深度进行了低频矢量水听器的应用试验[6]。
在国内,大深度矢量水听器的研究近十年才开始受到重视。杨松涛[7]于2010年探索了两种大深度矢量水听器的设计方案,一种是将一维柱形矢量水听器放入黄铜耐压壳体后注入硅油;另一种是采用环氧树脂和玻璃微珠复合材料灌封的内有充油腔的二维矢量水听器,压力试验显示两种方案均能承受1 000 m深度的水压。邹亮[8]于2011年制作了3种能在2 000 m水深工作的矢量水听器,该3种水听器均采用外部复合材料壳体加内部铝合金壳体的双层壳体耐压方案,一种是二维柱形矢量水听器,另外两种分别是空气腔和充油腔的三维球形矢量水听器。以上几种方案均采用了复合材料灌封工艺,加工工艺复杂繁琐;复杂的结构也导致了水听器的体积较大,工作频段偏低。
相关项目需要矢量水听器必须能够搭载在“海燕-Ⅱ”水下滑翔机上、并能够在平台的最大下潜深度正常工作,本文拟采用胶囊形铝合金壳体加O形圈密封的方案,设计一种大深度同振式矢量水听器。“海燕-Ⅱ”的工作深度为1 500 m,为保证一定的安全余量,矢量水听器的设计深度定为2 000 m。
1 同振式矢量水听器拾振原理
刚性水听器置于声场中,其表面会受到声场作用力的激励而发生振动,并产生二次辐射,这时介质对接收器还有一个反作用力。此时水听器在声场中可认为是一个单自由度机械振动系统,其受到合力的作用而产生强迫振动,研究这个振动系统的稳态解,即可求知水听器的振速与原声场中声波振速的关系。根据文献[9],假设声场为平面波,水听器受声场作用产生自由振动,水听器满足声学刚性,其形状为标准球形或圆柱形,其尺寸满足ka=1(其中,k为波数;a为接收器最大半径,m),则水听器的振速v与原声场中水听器等效声中心处的质点振速v0有以下关系。
若水听器为球形:
(1)
若水听器为圆柱形:
(2)
式中ρ0——声场介质密度,kg/m3;

由式(1),(2)可知,当水听器平均密度与介质密度相当时,水听器的振速幅值与声场中同一位置处质点的振速幅值相当,相位差趋近于零。因此,只要将水听器密度做成与介质密度相当,并在水听器内部刚性安装能够检测振速的传感器,即可拾取声场的振速信息。该结论的前置条件可表示为:f≪c/2πa(其中,f为声波频率,Hz;c为介质中的声速,m/s)。因此,在水听器密度与介质密度相当的情况下,水听器的最大半径a就是其最高工作频率的限制因素。
2 水听器耐压结构设计
矢量水听器的拾振原理要求其平均密度要与水相当,其重心要与形心相重合;为了尽量拓宽水听器的工作频段,矢量水听器的尺寸要尽量小;为了满足大水深的工作条件,矢量水听器又要具备较高的耐静水压能力。因此,大深度矢量水听器要同时满足平均密度小、体积小、抗压能力强3个必要条件。根据结构力学,要同时满足这三个要求,球形壳体结构是最佳选择。材料上则适宜选择密度较小、强度较高的铝合金。因此,本文采用薄壁铝合金球壳作为耐压结构进行设计,矢量水听器的结构如图1所示。

图1 矢量水听器结构
图1中,矢量水听器球壳的外半径为30 mm,壁厚3 mm。球壳由上下两个半球组成,中间采用橡胶O形圈轴向密封[10]。拾振传感器选取的是一只三轴向压电加速度计,该加速度计通过支架被安装在球壳的中央。为了给加速度计安装提供足够的空间,将球壳向两边各延长15 mm,形成胶囊形外壳。因此整个水听器的最大尺寸在其竖直方向,等效外半径45 mm。球壳材料选择7075-T6铝合金。所选三轴向加速度计的质量为27 g,装配完成后整个矢量水听器的质量为235 g,体积为1.98×10-4m3,整个矢量水听器的平均密度为1 180 kg/m3,与水的密度比为1.18,满足理论条件要求。
在水听器密度与水相当的前提下,水听器的最大尺寸就成为其最高工作频率的限制因素:f≪c/2πa。该矢量水听器的最大尺寸为45 mm,计算得到工作频率f≪5 305 Hz,故将其最高工作频率取为2 000 Hz。矢量水听器内部所用的三轴加速度计的工作频段为20~5 000 Hz,所以该矢量水听器的工作频段为20~2 000 Hz。
3 水听器结构耐压分析
3.1 理论计算
耐压结构的失效形式主要包括强度失效、刚度失效、稳定性失效和腐蚀失效。对大深度水听器而言,其承载的载荷主要为外部水压。在不考虑腐蚀失效的情况下,受外压的壳体容器失效方式主要有强度失效和稳定性失效。
(1)考虑强度失效。
根据回转壳体无力矩理论,受均布外压的球壳,其轴向薄膜应力σz和环向薄膜应力σθ在数值上相等[11],即:
σz=σθ=pDo/(4δ)
(3)
式中p——许用压力,MPa;
Do——球壳外径,mm;
δ——球壳厚度,mm。
7075-T6铝合金材料的常温标准抗拉强度Rm=570 MPa,常温屈服强度Rp0.2=505 MPa。由于水听器工作时受外压作用,且工作温度在4~40 ℃范围内,因此主要考虑常温屈服强度能否满足要求即可。根据GB 150.3—2011《压力容器 第3部分:设计》,对铝合金材料的常温标准抗拉强度,安全系数取3.0;对其常温屈服强度,安全系数取1.5,因此许用应力[σ]=190 MPa。设计时要满足σz=σθ≤[σ],代入式(3),可得强度失效许用压力p≤38 MPa。
对于水听器壳体中间的圆筒段,受外压时其轴向薄膜应力σz=pDo/(4δ),环向薄膜应力σθ=pDo/(2δ)[11],环向压应力是轴向压应力的2倍。计算可得其强度失效许用压力p≤19 MPa,是球壳的一半。虽然略小于20 MPa的耐压要求,但是在选择许用应力时已经考虑了较大的安全系数,因此暂时认为其能够满足耐压要求,并通过后续有限元分析和打压实测进一步验证。
(2)考虑稳定性失效。
根据文献[11],受外力作用的球壳的临界失稳压力pcr为:
(4)
式中μ——球壳材料泊松比;
E——球壳材料杨氏模量,MPa;
R——球壳外半径,mm。
周向失稳许用压力[p]≤pcr/m(其中,m为稳定系数,根据GB 150.3—2011,取m=14.52)。7075-T6 铝合金材料的泊松比μ=0.33,杨氏模量E=7.1×104MPa,球壳厚度δ=3 mm,球壳外半径R=30 mm。将数据代入式(4),计算得其周向失稳临界压力pcr=868.5 MPa,周向失稳许用压力[p]≤59.8 MPa。
对于水听器壳体中间的圆筒段,其中间高度为9 mm的O形圈法兰起到了加强圈的作用,因此可以当作两个外半径30 mm,厚度3 mm,长度为10.5 mm的薄壁外压短圆筒,可用拉默公式求解其临界失稳压力[11-12]:
(5)
计算可得中间圆筒段的临界失稳压力为587.4 MPa,其稳定系数取3.0,可得其周向失稳许用压力为195.8 MPa。
由耐压球壳的强度失效和稳定性失效的理论计算结果可见,该矢量水听器耐压壳体的周向失稳许用压力大于其强度失效许用压力,若该球壳外部压力持续增大,最先发生的是强度失效。
3.2 有限元仿真
上述水听器壳体耐压性能为理论计算值,计算公式采用的多为工程简化公式,与实际情况有一定的出入;另外,上半壳体还存在用于安装水密穿舱件的开孔,这会导致其耐压极限下降。为进一步确定水听器球壳的耐压能力,通过有限元分析软件ANSYS Workbench对其进行结构静力仿真和特征值屈曲仿真。
首先使用SolidWorks软件对水听器壳体进行三维建模,然后将模型导入Workbench软件中,设置壳体材料为7075-T6铝合金,上壳体和堵头之间、上下壳体之间的接触模式均设置为绑定模式,采用六面体方法对模型进行网格划分,网格大小设置为弯曲函数,其中最大尺寸设为1 mm,最小尺寸设为0.01 mm。得到单元总数为148 772,节点总数为419 102。在堵头的上表面设置固定支撑,在水听器壳体所有的外表面上施加20 MPa的外压力载荷(包括O形圈凹槽的内表面),对其进行结构静力分析。仿真获得水听器壳体的应力强度分布如图2所示。该应力强度是基于第三强度理论的当量强度,是给定点处最大主应力与最小主应力的代数值之差。
图2 水听器耐压壳体应力强度分布
从图2可以看出,水听器下半球壳的应力强度仿真值最小,其值在85~114 MPa之间,此处不包括不连续和应力集中,可以认为是一次总体薄膜应力强度,而该处薄壁球壳的一次总体薄膜应力理论计算值为100 MPa,与仿真结果相吻合,且满足小于设计应力强度Sm=190 MPa的要求;中间的圆筒段长度只有30 mm,且中间有厚度达到9 mm 的法兰段,可以认为整段圆筒都在一次局部薄膜应力区,其仿真值小于142 MPa,而对于一次局部薄膜应力,其应力强度的许用极限为1.5Sm=285 MPa,可见中间圆筒段也满足耐压要求;上半球壳部分由于存在开孔,其应力强度比较大,且在开孔周围出现应力集中,上半球壳排除应力集中后的部分可以认为是一次加二次应力强度,其应力强度的许用极限为3.0Sm=570 MPa,而其仿真值小于227 MPa,能够满足耐压要求;在开孔周围应力集中的地方,可以认为是一次加二次加峰值应力得到的峰值应力强度,其最大值为255 MPa,也未超过570 MPa。需要注意的是,这些应力集中的部位也是最容易发生疲劳破坏的地方,要予以充分考虑。
接下来在水听器球壳的外表面施加1 MPa的压力,对其进行特征值屈曲分析。仿真得到其第一阶屈曲模态的形变如图3所示。上述理论计算得到中间圆筒段的临界失稳压力为587.4 MPa,两端球壳的临界失稳压力为868.5 MPa,因此最先发生失稳的应是中间圆筒段。由图3可以看出,第一阶屈曲模态中发生失稳的是中间的圆筒段,符合理论计算的判断。第一阶屈曲载荷因子为598.98,施加的外压为1 MPa,故其第一阶临界载荷为598.98 MPa,与理论计算结果基本吻合。
(a)

(b)图3 水听器耐压壳体第一阶屈曲模态
3.3 疲劳失效分析
水听器工作时,由数根弹簧悬挂在水下滑翔机头部的框架上,其与平台间没有刚性接触的位置,受到水下声场的作用而发生整体的微幅振动,而水听器壳体局部间没有相对振动,因此振动对其结构的影响可以忽略。水听器壳体在正常工作时随水下滑翔机作规律的上浮下潜动作,且其所处的海水层的温度从30~4 ℃发生缓慢的周期变化,由于水听器完全浸泡在海水中,铝合金材质壳体与海水间的热交换良好,且水听器内部没有发热元件,可以认为水听器局部之间没有温度差,温度对水听器结构的影响可以忽略。假设下潜深度为2 000 m,则水听器壳体受到的外界压力从1个大气压缓慢增加到20 MPa,再从20 MPa 缓慢减少到1个大气压,一个循环周期为4 h左右,水听器壳体可能发生高应力低周疲劳失效。这里采用JB 4732—1995《钢制压力容器——分析设计标准(2005年确认)》中给出的以疲劳分析为基础的设计方法,对其疲劳失效进行分析。
水听器在每个压力循环周期中,主应力的方向不变,且只有单个显著应力循环。耐压壳体中最容易发生疲劳破坏的地方是上半球壳开孔周围应力集中的部位,由图2可以看出,整个耐压壳体主应力差的最大值为255 MPa,则整个循环过程的交变应力强度幅Salt=127.5 MPa。所用材料的抗拉强度为570 MPa,将数据代入JB 4732—1995(2005年确认)中碳钢、低合金钢的设计疲劳曲线,查表得到其循环次数约为4 000次。按照水下滑翔机每4 h滑翔一个剖面来算,4 000次可以允许水听器在水下滑翔机上连续工作22个月,因此要注意记录水听器在水下滑翔机上的工作时间,当累计达到22个月时,为确保安全,要注意及时更换新的水听器。
4 水听器性能测试
为验证矢量水听器的各项性能指标,将水听器样品在压力釜内进行20 MPa压力测试,并在驻波管中对压力测试前后的矢量水听器分别进行灵敏度和指向性测试。大深度矢量水听器样品及其性能测试环境如图4所示。
图4 矢量水听器及测试环境
4.1 灵敏度测试
矢量水听器的灵敏度一般用等效自由场声压灵敏度Mp表示,其与矢量水听器内部加速度传感器的加速度灵敏度Ma有如下关系[9]:
(6)
式中ρ——介质密度,kg/m3;
c——介质声速,m/s;
ω——声波角频率,rad/s。
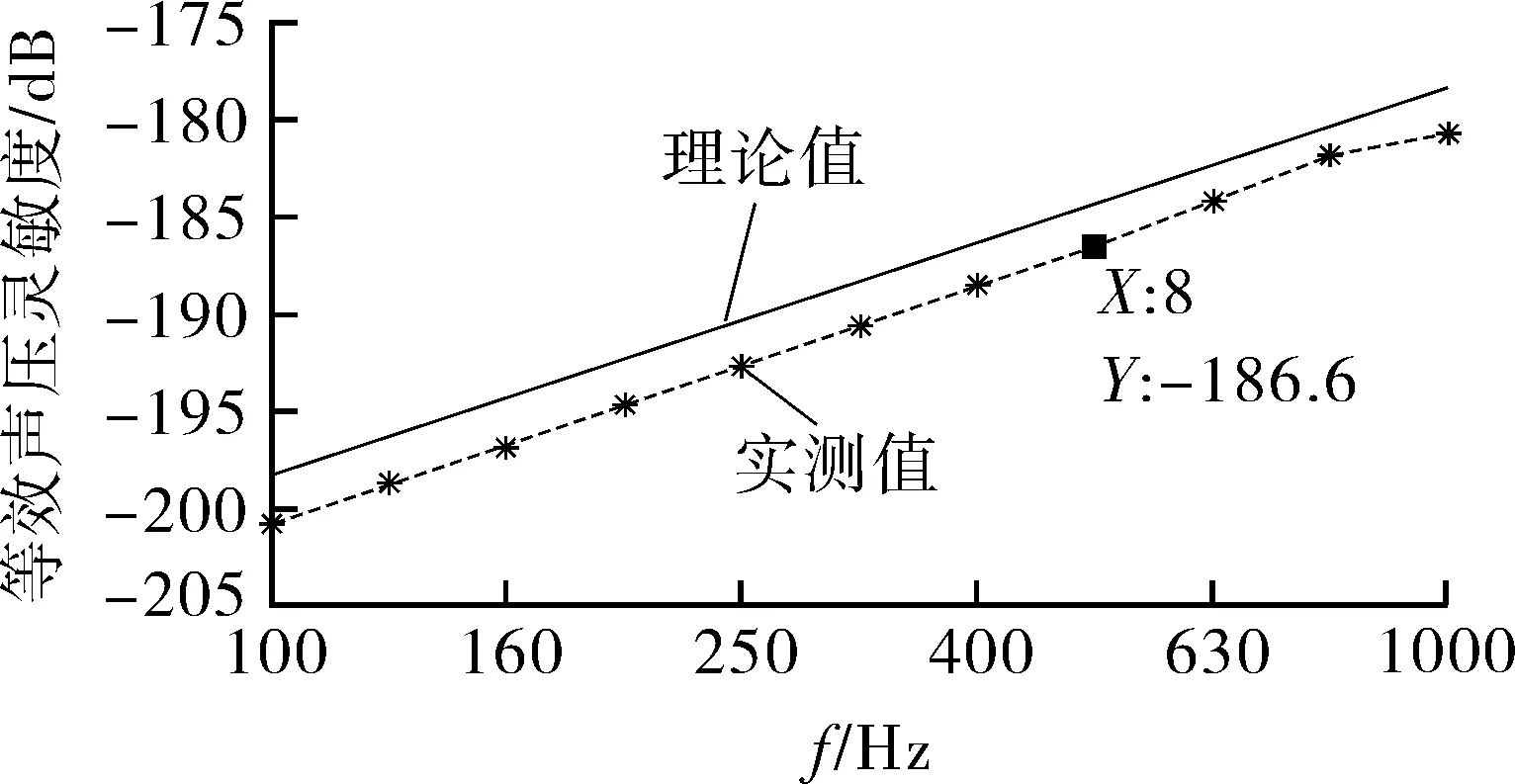
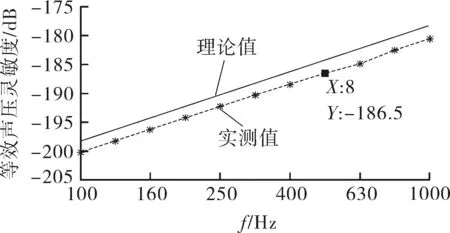
矢量水听器中所用加速度计的标称加速度灵敏度Ma=0.289 8 V/(m/s2),由式(6)可得矢量水听器的理论声压灵敏度为-184.3 dB(500 Hz处,0 dB=1 V/μPa),其理论等效声压灵敏度曲线如图5所示,每倍频程增加6 dB。
(a)X通道
(b)Y通道
(c)Z通道图5 矢量水听器灵敏度测试结果
矢量水听器各通道的灵敏度在驻波管中采用比较法测试,所用驻波管工作频率为100~1 000 Hz。在500 Hz处矢量水听器各通道灵敏度曲线实测结果如图5所示。可以看出,X通道的灵敏度为-186.5 dB,Y通道的灵敏度为-186.6 dB,Z通道的灵敏度为-186.5 dB;各通道灵敏度一致性很好;每倍频程增加6 dB,与理论相吻合;测量频带内灵敏度级不稳定性小于1 dB。3个通道灵敏度的实测曲线与理论曲线不一致,在各频点均比理论值低1.5 dB左右,是因为本矢量水听器与水的密度比为1.18,略大于1,导致矢量水听器的同振幅度稍有下降。
4.2 指向性测试
(a)X通道

(b)Y通道
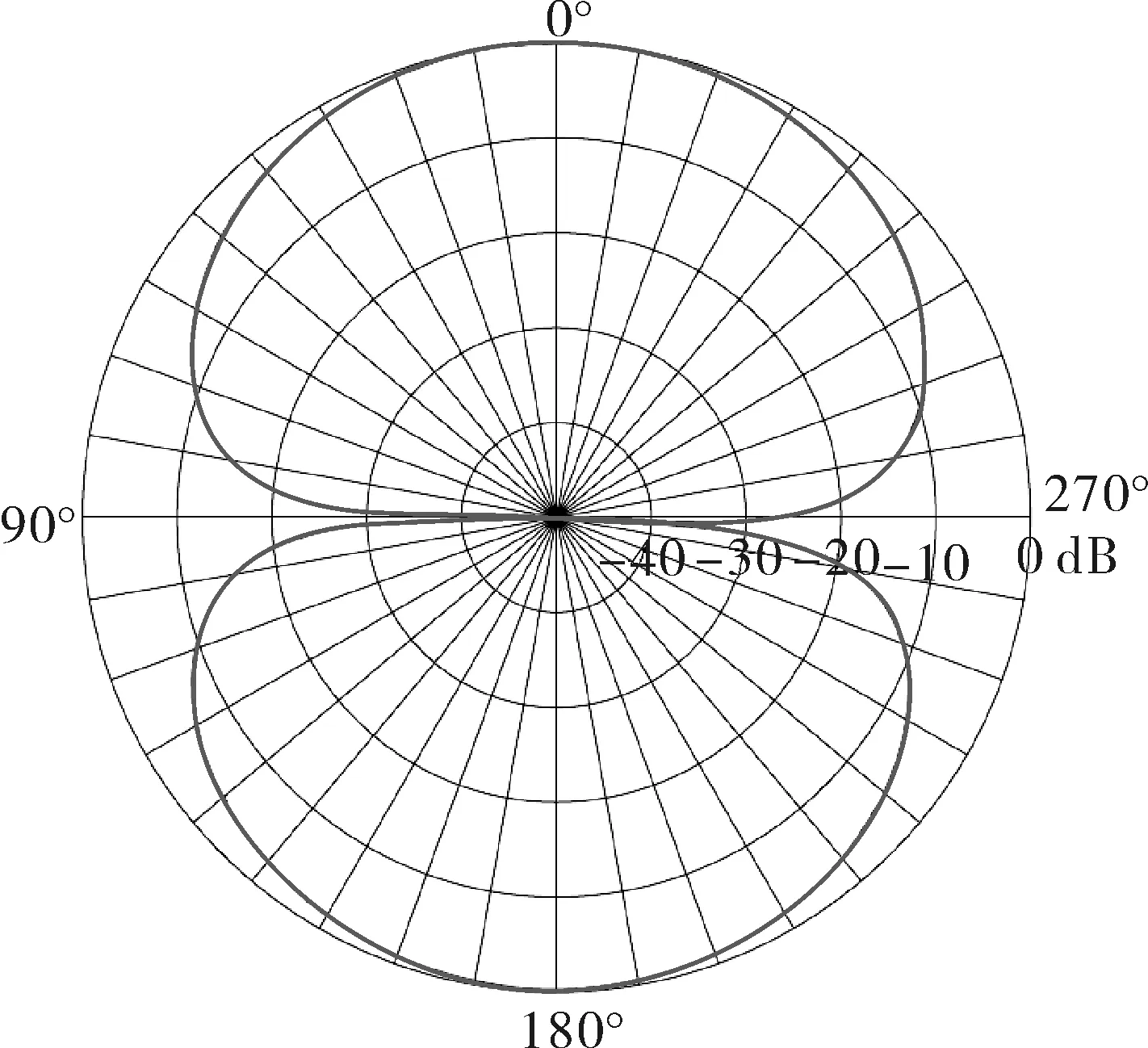
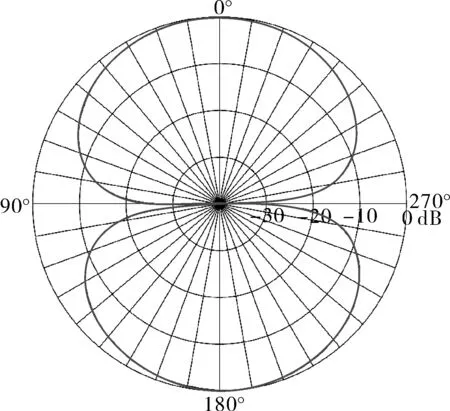
(c)Z通道图6 矢量水听器指向性测试结果 (测试频率f=500 Hz)
理论上,矢量水听器的各通道应具有与频率无关的余弦指向性。将矢量水听器悬挂于驻波管中的旋转框架内对其进行指向性测试,角度间隔为0.4°。图6示出500 Hz频点时矢量水听器各通道指向性曲线的测量结果,矢量水听器各通道均具有良好的余弦指向性。可以看出,X通道灵敏度凹点深度为-37.3 dB,Y通道灵敏度凹点深度为-45.5 dB,Z通道灵敏度凹点深度为-49.1 dB。可见该矢量水听器的最小凹点深度达到-37.3 dB,可以满足应用需求。
4.3 耐压性能测试
矢量水听器的耐压测试在某国家实验室的35 MPa压力釜内进行。测试过程模拟水听器在水下平台上的受压过程,先匀速加压到20 MPa,保压1 h,泄压,再次加压到20 MPa,如此循环3次。整个加压过程压力釜内没有发生明显压降;加压结束后检查被测水听器,2只实例试样外观均无损伤,测试前后称重一致;然后在驻波管中对其灵敏度和指向性进行二次测试,测试结果显示与打压前的灵敏度和指向性基本一致。证明该矢量水听器能够耐受2 000 m深度的水压。
4.4 海上试验
2019年8月,某潜艇学院在南海开展了水下无人平台声学目标探测试验,本文所设计的大深度矢量水听器搭载在“海燕-Ⅱ”水下滑翔机上进行了深潜试验。“海燕-Ⅱ”水下滑翔机的最大下潜深度为1 500 m,基于平台安全考虑,将其下潜深度设定为1 200 m。图7为截取的搭载了大深度水听器的水下滑翔机3个运行剖面的深度实测数据,其最大下潜深度为1 153 m。大深度矢量水听器在整个试验过程中工作稳定,获取了正常的水声信号。
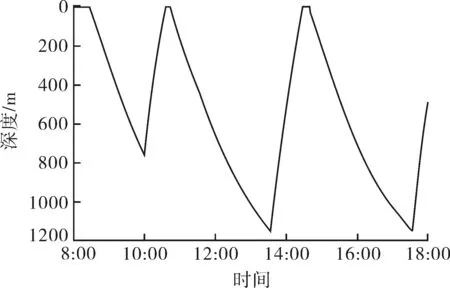
图7 水下滑翔机运行深度实测数据
5 结论
大深度矢量水听器的设计要同时满足抗压能力强、平均密度小、体积小等互相制约的条件。本文针对水下滑翔机和剖面浮标等水下无人平台的声学任务载荷需求,以胶囊形铝合金薄壳为耐压结构,设计并制作了一种工作深度达到2 000 m的同振式矢量水听器,证明了铝合金材料胶囊形薄壳体是设计大深度矢量水听器耐压结构的一种可行方案。海上试验证明,该矢量水听器能够搭载在水下滑翔机并在大深度开展声学探测任务,在水下目标探测等领域具有重大的应用价值。
猜你喜欢
船舶力学(2024年1期)2024-01-19 06:56:02
电声技术(2022年3期)2022-04-28 00:22:50
应用科技(2020年1期)2020-06-18 02:02:36
知识就是力量(2019年7期)2019-07-01 17:33:03
军事文摘(2018年24期)2018-12-26 00:58:00
小学科学(学生版)(2018年12期)2018-12-19 05:13:46
河北建筑工程学院学报(2017年3期)2017-12-15 07:24:54
船舶力学(2017年7期)2017-08-01 00:02:51
光学精密工程(2016年5期)2016-11-07 09:06:29
声学技术(2014年1期)2014-06-21 06:56:34
