基于仿真果园试验台的植保无人机施药雾滴飘移测试方法与试验
2020-08-12 13:50王昌陵何雄奎曾爱军AndreasHerbstSupakornWongsuk乔白羽袁善奎VerenaOverbeckJaneBonds周国强高万林
农业工程学报 2020年13期
王昌陵,何雄奎,曾爱军,Andreas Herbst,Supakorn Wongsuk,乔白羽,赵 铖,袁善奎, 钟 玲,Verena Overbeck,Jane Bonds,杨 苡,周国强,王 轩,高万林
·农业航空工程·
基于仿真果园试验台的植保无人机施药雾滴飘移测试方法与试验
王昌陵1,2,何雄奎1,3※,曾爱军1,3,Andreas Herbst4,Supakorn Wongsuk1,3,乔白羽1,3,赵 铖1,3,袁善奎5, 钟 玲6,Verena Overbeck4,Jane Bonds7,杨 苡8,周国强9,王 轩10,高万林2
(1. 中国农业大学药械与施药技术研究中心,北京 100193;2.中国农业大学信息与电气工程学院,北京 100193;3. 中国农业大学理学院,北京 100193;4.德国联邦作物研究中心植保施药技术研究所(JKI-AT),布伦瑞克 D-38104;5. 农业农村部农药检定所,北京 100125;6. 江西省植保植检局,南昌 330096;7. 邦德斯咨询有限公司,巴拿马城 32408;8. 北方天途航空技术发展(北京)有限公司,北京 102202;9. 安阳全丰航空植保科技有限公司,安阳 455001;10. 深圳市大疆创新科技有限公司,深圳 518057)
植保无人机(Unmanned Aerial Vehicle,UAV)果树飞防植保作业中飞行高度较高并且采用低容量细小雾滴喷雾,飘移风险极高。但是,无人机果园施药雾滴飘移特性研究尚处于初步开展阶段,缺乏全方位综合测试方法以及对不同无人机机型和喷头类型的评价。该研究在前期研究基础上,提出一种基于仿真果园试验台的植保无人机果园施药雾滴飘移测试方法,设计并制作仿真葡萄园试验台和空中飘移收集装置,结合地面飘移收集装置和冠层沉积收集带,首次通过雾滴空间飘移指数ADX定量分析评价不同机型的喷雾过程中农药雾滴空间飘移特性,并采用田间近地飘移测试平台进行无人机喷雾飘移试验,使用荧光示踪法探究4种典型植保无人机(油动单旋翼、电动6旋翼及2种电动8旋翼无人机)分别搭载IDK 120-015空气射流喷头和TR 80-0067空心圆锥喷头喷雾作业的雾滴冠层沉积分布、地面飘移、近地飘移及空中飘移特性,进而对不同喷雾飘移测试收集装置进行评估。结果表明:在侧风速2.2~3.6 m/s,温度29.8~34.3 ℃,相对湿度10.7%~30.6 %的环境条件下,IDK空气射流喷头在作业高度1.5 m、速度 2.0 m/s参数下可显著降低无人机喷雾下风向飘移水平,优化沉积分布均匀性,提高农药雾滴利用率;4种机型飘移特性无显著差异,旋翼下洗气流产生的卷扬涡流是影响无人机喷雾飘移的重要因素;葡萄园喷雾作业缓冲区至少应设置为15 m;冠层沉积率越小(<0.05,<0)、沉积分布变异系数越高(<0.01,>0)、田间飘移平台平均均值飘移率和90%累积飘移距离越大(<0.01,>0)以及ADX值越大(<0.01,>0)均表明雾滴飘移风险越高,3种收集装置及其评价指标均可有效评估下风向飘移特性;植保无人机喷雾飘移率与下风向距离满足指数函数关系。研究结果以期为新型果树专用植保无人机研发、植保无人机果园作业喷雾飘移测试方法的标准制定和田间作业参数选择提供参考和数据支持。
无人机;试验;喷雾;下风向;空中飘移;地面飘移;测试方法
0 引 言
近年来应用植保无人机(Unmanned Aerial Vehicle,UAV)的低空低量植保作业凭借可人机分离、人药分离、地形适应性好、机动灵活、高效省工、节水省药以及智能化程度高等优势[1-2]在中国高速发展,契合当前国内现代化农业高效、优质、节约、友好的发展要求[3]。经过前期在大田作物(玉米、水稻、小麦、棉花)病虫害防治中探索,当前植保无人机大田作物应用技术已日趋成熟,越来越多的生产商和服务组织将目光投向了附加值较高的经济作物特别是果树的飞防植保作业,纷纷研发果树植保专用无人机及其作业模式,力求解决果树病虫害防治中作业次数多、农药飘失严重、雾滴穿透性差、复杂地形环境下喷雾作业雾滴分布不均匀等难点。为保证作业安全,果树喷雾时无人机飞行高度一般设置在距冠层顶端1.5~2.0 m,距地面高度则至少为3.5~4.0 m,因低容量喷雾的雾滴较细,在如此飞行高度下产生喷雾飘移的风险极高[4-6],因此植保无人机果树施药雾滴飘移特性研究尤为必要。
目前,国内外有关植保无人机的低空低量喷雾飘移特性研究更多集中在大田作物田间试验[7-9]和旋翼下洗气流模拟[10-12],相比于大田作物,果树的叶片冠层体积更大且更茂密,因此当前大部分无人机果树施药技术研究都聚焦于冠层沉积穿透性上[12-16]。陈盛德等[13]采用三因素(飞行高度、速度、流量)正交试验对多旋翼无人机橘树施药作业参数进行了优选。刘德江等[14]比较了植保无人机和传统地面施药机具在柑橘、柚子、杨梅果树冠层上的雾滴沉积分布,发现扇形喷头横喷杆结构药液沉积分布均匀性优于离心雾化喷雾系统。张豪等[12]利用计算流体动力学(CFD)方法模拟了6旋翼植保无人机悬停果树施药下洗气流场,明确了自然风速是无人机悬停果树施药效果的主要影响因素。Sarri等[15]通过水敏纸收集雾滴,对植保无人机、背负式喷雾器和喷枪在小型山地葡萄园施药作业效率和雾滴沉积分布和进行了评估。刘琪等[16]探究了电动无人直升机喷头间距和飞行高度对苹果树雾滴沉积分布的影响,得出最佳喷头间距参数。
而植保无人机果园施药雾滴飘移特性研究尚处于初步开展阶段。Li等[17]比较了电动4旋翼无人机和风送式果园喷雾机苹果园喷雾冠层沉积、空中飘移和地面流失情况,指出了高度和喷洒系统设计对飘移的影响。Brown等[18]对R-Max II型油动单旋翼无人机葡萄园喷雾沉积和飘移进行了测试,发现了沉积与飘移结果间的相关性。Martinez-Guanter等[19]在橄榄、柑橘园中通过布置在邻行果树的水敏纸测定了搭载超低容量变量喷雾系统的无人机与果园风送喷雾机的飘移情况,结果表明该无人机超低量喷雾系统可有效降低飘移风险。目前,针对低空低量果树施药的研究大多是无人机与传统果园喷雾方式的比较或单一机型的沉积飘移试验,大多采用水敏纸图像分析法[13,15-17,19]或比色示踪法[14,17],检出灵敏度不足而无法定量测定远距离飘移雾滴量,有的采用化学分析法[18],实际操作复杂且成本较高。对于低空低量果园喷雾飘移全方位综合测试方法以及典型无人机机型、喷头类型对无人机喷雾沉积和飘移特性影响的研究还未见报道;此外,由于果园内喷雾环境相对密闭,施药过程对周围环境影响更严重的应是农药雾滴向园外非靶标区域的飘移,而园外飘移试验实际操作上的难点往往在于找到贴近果园边缘的较大面积无遮挡地块以布置飘移雾滴采样装置。
因此,本文基于中国农业大学药械与施药技术研究中心团队前期研究基础[4,12-13,20-21],提出一种植保无人机果园施药雾滴飘移测试方法,设计并研制仿真果园(葡萄园)试验台和空中飘移收集测试装置,采用田间近地飘移测试平台收集无人机下风向不同距离飘移雾滴,结合田间喷雾测试常用的地面飘移收集装置和冠层沉积收集带,使用检出灵敏度较高的荧光示踪法对4种典型植保无人机分别搭载IDK空气射流喷头和TR空心圆锥喷头进行实际作业喷雾飘移测试,比较获得的冠层沉积分布、地面飘移、近地飘移和空中飘移结果并分析其相互关系,对不同喷雾飘移测试收集装置进行评估,研究结果以期为新型果树专用植保无人机研发、植保无人机果园作业喷雾飘移测试方法标准的制定以及田间作业参数选择提供参考和数据支持。
1 材料与方法
1.1 材料与设备
如图1所示,试验采用的设备与装置主要有:仿真果园试验台、雾滴收集装置、样品分析及气象参数监测装置、参试植保无人机。
1.1.1 仿真果园试验台
由于田间试验很难找到紧贴果园边缘的大面积无遮挡地块布置雾滴采样器,果园喷雾试验中可根据需要在开阔空地搭建仿真果园试验台模拟作业场景,试验台高度和宽度可依据果树形态和种植方式确定,长度可根据试验场地大小而定。例如:矮化纺锤形苹果园仿真试验台高×宽尺寸可设置为3.0 m×1.0 m,行距3.5 m;标准化圆柱形梨园可设为3.5 m×1.5 m,行距4.0 m。本研究中以葡萄园喷雾场景为例进行试验,在开阔空地上采用长×宽× 高规格为2.0 m×0.5 m× 2.0 m特制不锈钢桁架搭建仿真葡萄园试验台,如图1a所示。在不锈钢桁架距地面0.5m高度以上部分覆盖黑色抗老化防晒网(孔径4 mm,江苏沐阳绿嘉花卉有限公司)模拟葡萄叶片冠层,使用扎带固定。设计的仿真葡萄园试验台每行由8个不锈钢桁架首尾相接组成,行间距2.5 m,共9行,总计72个桁架,长16 m,宽20 m。在不锈钢桁架行间固定横梁将相邻两行互相联结,使全部模拟冠层构成一个稳定整体,防止试验期间短时强风导致货架倾覆。
1.1.2 雾滴收集装置
1)冠层沉积收集带
使用尺寸为8.55 cm×5.40 cm的矩形聚氯乙烯(Polyvinyl Chloride,PVC)卡片(上海红溯橡胶科技中心有限公司)组成冠层沉积收集带接收航线下方仿真葡萄园试验台冠层沉积雾滴,用塑料双头夹将雾滴收集卡置于仿真冠层顶部,布置间隔为0.5 m,每条收集带13张PVC卡片,宽度6.0 m,设置3行,每次试验共收集39张样品。
2)地面飘移收集装置
为测量植保无人机喷雾雾滴在下风向的地面飘移分布情况,根据ISO 22866喷雾飘移田间测试标准[22],在下风向距离植保无人机喷幅边缘3、5、10、15和20 m处各分别布置10个直径为15 cm塑料培养皿(南通范思贝生物科技有限公司),放置于地面上的金属横板表面以确保培养皿保持在相同平面上,每次飞行收集培养皿数目为50。
3)空中飘移收集装置
设计并制作3组空中飘移收集装置测量飘移雾滴在下风向同一竖直平面不同高度的沉积分布,搭建高×宽为5.5 m×2.0 m的可翻转雾滴收集框架,由30 mm×30 mm铝合金型材制成,安装在40 mm×80 mm铝型材底座上,收集框架与底座通过安装在1.8 m高度的转动轴相连,便于试验过程中将架翻转放倒以布置和收集样品。雾滴收集框架自高度0.5 m起直至4.5 m处每隔0.5 m设置1根长2.0 m的Φ2 mm聚乙烯(PE)软管(上海红溯橡胶科技中心有限公司),PE软管两端用25 mm长尾票夹(得力集团有限公司)固定在框架上,绷直以保证无弯曲,每个框架上10根,单次测试共计30根雾滴收集软管。
4)近地飘移收集装置
田间近地飘移测试平台(field drift test bench,比利时AAMS Salvarani公司)原用于地面植保机具(喷杆喷雾机、果园喷雾机)喷雾飘移潜力测试[23-24],利用其进行植保无人机田间飘移测试尚未见报道,本文中采用这种测试平台垂直于飞行方向放置测定植保无人机喷雾下风向近地面处飘移雾滴量。该平台由雾滴收集装置和控制系统组成,飘移收集装置由5段2.0 m×0.5 m的铝型材平台首尾相连组成,可以根据需求调整高度,共有20个间距为0.5m带有可闭合滑盖的雾滴收集凹槽,滑盖开闭由含有气泵的气动控制系统控制,每个凹槽内可放置1-2个Φ15 cm培养皿,每次试验共收集20或40个样品。
1.1.3 样品分析、气象参数监测及其他装置
测试前,在无人机起降区域和近地飘移收集装置处分别铺设长宽为20 m×3 m的聚酯防尘网(滨州凌岳化纤绳网有限公司),减少无人机飞行过程中旋翼下洗气流卷扬起的尘土对测量结果的影响。配置质量分数为0.1%的荧光染色剂Pyranine(溶剂绿7,CAS号:6358-69-6,德国Simon&Werner有限公司)水溶液作为喷雾液,避光静置于20 L带盖塑料水箱中待用。测试后,雾滴收集器加入去离子水经TS-1000振荡器(江苏海门其林贝尔仪器制造有限公司)振荡洗脱或经KM-36C超声波清洗机(广州市科洁盟实验仪器有限公司)超声洗脱,示踪剂洗脱液采用LS-55型荧光分光光度计(Perkin Elmer股份有限公司,美国)检测。
试验中风速、风向等自然风信息通过WindMaster型三维超声波风速风向仪(GillInstruments有限公司,英国)获取,该风速仪最高采样频率:20 Hz,量程:0~50 m/s & 0~359°,分辨率:0.01 m/s & 1°,测试时将2个风速传感器分别安装在距地面2 m和4 m高度的田间气象站支架上,数据输出频率设为10 Hz,传感器通过数据线与控制单元相连,使用24 V电瓶供电,通过笔记本电脑和LoggerNet 4.4软件(Campbell Scientific公司,美国)可实时监测并保存风速数据。此外,环境温度和湿度由350-XL型环境分析仪(Testo仪器有限公司,德国)获取。

图1 试验装置及场地布置示意图
1.1.4 参试植保无人机
中国植保作业主力机型为电动多旋翼无人机,主要为电动6旋翼和8旋翼无人机,喷头布局方式有喷杆式和旋翼下方两种[25]。因此,选用当前中国低空低量植保作业中常用的具代表性的4种植保无人机参与本试验,分别为:安阳全丰航空植保科技有限公司生产的3WQF120-12型油动单旋翼无人机、北方天途航空技术发展(北京)有限公司生产的3WM6E-10型电动6旋翼无人机和3WM8A-20型电动8旋翼无人机以及深圳市大疆创新科技有限公司生产的3WMG-1P型电动8旋翼无人机,表1为其主要技术参数。

表1 参试无人机主要技术参数
喷雾试验中4种无人机分别搭载德国Lechler公司生产的TR 80-0067型空心圆锥喷头和IDK 120-015型空气射流扇形喷头。经激光粒径分析仪(Spraytec, 英国Malvern Instruments公司)测量,其在0.3 MPa压力喷雾时喷头下方50 cm处测得的雾滴体积中径(Volume Median Diameter, VMD)均值分别为114.9和312.6m,粒径小于75m雾滴比例为16.1%和1.8%。空心圆锥喷头雾滴较细,常用于果园病虫害防治;空气射流喷头雾滴比普通扇形喷头粒径大,抗飘移能力较强。
1.2 试验方法
室外喷雾试验于2019年5月至6月在北京市昌平区马池口镇埝头工业园北方天途公司飞行基地(40°11'30" N;116°10'10" E)进行,试验区域为一块平整空地,四周无明显障碍物遮挡,除少量杂草外基本没有植被覆盖,总面积约900 m2。试验场地布置情况如图1所示,冠层沉积收集带布置在仿真冠层第4、5、6行,第1张PVC卡位于喷幅边缘处;3组空中飘移收集装置分别间隔5.0 m竖立在下风向距离无人机作业喷幅边缘2.0 m位置,使雾滴收集框架平行于无人机飞行航线;承接地面飘移培养皿的横板垂直于无人机行进方向,与空中飘移收集装置中心位于同一直线上,在下风向相同距离间隔也是5.0 m;收集近地雾滴的飘移测试平台前端位于下风向2.0 m处,垂直于飞行航线方向,平台高度设为0.3 m;三维风速传感器支架搭建在试验场地附近不干扰飞行的位置,温湿度传感器安装在场地附近室外避光处,试验全程气象参数均通过数据线传输至笔记本电脑,可实现实时监测和记录。为充分利用田间自然风,场地朝向选择需参考当地历史风向数据并利用相对频繁且稳定的风向进行试验,而且需在场地另一侧提前对称地布置相同的测试装置,当风向转到相反方向时可以迅速布置雾滴收集器开始后续测试。场地布置完成后,操作大疆PHANTOM 4 PRO型航拍无人机爬升至场地正上方30 m高度检视各装置摆放位置和方向使其准确无误。
试验前,先标定并记录待测无人机喷头流量。按照ISO 22866标准[22],本方法中飘移试验可接受自然侧风参数(风速、风向)范围为1.0~5.0 m/s(2 m高度),与航线夹角90°±30°。场地布置及流量标定工作完毕后,监测实时风速、风向信息,当风速和风向达到要求且可以稳定至少1 min时,将配置好的喷雾液加入药箱并通知操控手进行起飞前准备,在各部分收集装置上布置雾滴收集器,启动航拍机准备全程拍摄。图2为喷雾飘移试验现场,操控手操作植保无人机进行共3条航线的喷雾作业,无人机起飞后首先调整至设定高度开启喷洒系统,开始作业的同时操作近地飘移测试平台控制系统打开滑盖并在执行完第1条航线作业后关闭,全部作业完成后关闭喷洒系统,转向朝上风向飞离试验场地返回起落区域以避免污染样品,待雾滴收集器上雾滴晾干后收集所有样品并取喷雾母液。近地飘移测试平台仅对第1条航线飘移雾滴进行采样,冠层沉积收集带、地面及空中飘移收集装置均采集全部3条航线作业沉积及飘移雾滴。
每次试验结束后,立即将所有样品(PVC卡片、PE软管、地面培养皿、近地培养皿、母液取样瓶)避光保存,PVC卡、PE软管分别收集保存在规格为17 cm×12 cm和34 cm×24 cm塑料自封袋中,培养皿储存在包装纸箱内,避免样品之间交叉污染,全天试验结束后将当天获取的样品运输至实验室避光、阴凉处储存,随后对样品进行处理和测定。处理样品时,PVC卡自封袋中加入400 mL去离子水,于振荡器上在200 r/min的频率下振荡洗脱5 min;培养皿中加入60 mL去离子水,振荡洗脱10 min;PE软管自封袋中加入100 mL去离子水,排出气泡后置于超声波清洗机中超声洗脱5 min。最后将各类样品洗脱液依次使用LS-55型荧光仪测量并记录荧光值,荧光仪测量参数设为:电压650V,激发波长400 nm,接收波长505 nm,狭缝宽度15 nm。
试验参数设置如表2所示,4种植保无人机分别搭载IDK 120-015空气射流喷头和TR 80-0067空心圆锥喷头进行测试,共8个处理组,每个处理组至少进行5次重复试验。为排除试验材料、场地等因素对结果的干扰,处理组2、4、6中各进行1次空白对照试验,即除不喷雾外处理方式与其他测试组完全相同。试验全程无人机飞行参数保持不变,飞行速度设为2.0 m/s,高度设为3.5 m(距冠层顶端1.5 m);喷雾压力均设定为0.3 MPa,由于不同机型液泵有所差异,根据测得流量可估算处理组1喷雾压力在0.3~0.4 MPa范围内,其他处理组均在0.3 MPa左右。

表2 试验处理组设置及相关施药参数

1.仿真葡萄园试验台 2.冠层沉积收集带 3.地面飘移收集装置 4.空中飘移收集装置 5.近地飘移测试平台 6.待测植保无人机 7.防尘网
1.3 数据处理
1.3.1 沉积/飘移率
按照ISO 24253-1[22]和ISO 22866标准[26],各种雾滴收集器上喷雾沉积/飘移率计算公式如式(1)、(2)所示。

式中dep为单位面积雾滴沉积/飘移量,mL/cm2;dil为加入洗脱液的体积,mL;smpl为洗脱液的吸光值;blk为空白雾滴收集器的荧光值;spray为喷雾液示踪剂浓度,g/L;cal为荧光值与示踪剂浓度的关系系数,g/L;col为雾滴收集器面积,cm2;dep%为沉积/飘移率,%;V为施药液量,L/m2,其中V=(10·),为喷雾流量,mL/s;为喷幅,m;为飞行速度,m/s。
1.3.2 平均均值飘移率/平均中值飘移率
平均均值飘移率(Average Average Drift Rate, AADR)是对一个处理组中不同下风向距离(竖直高度)所有平行数据结果的均值求平均值,计算公式为
式中`dep% i为第组下风向距离沉积率均值;为下风向不同距离取样组数。
此外,本研究提出一种平均中值飘移率(Average Median Drift Rate, AMDR)来分析地面培养皿结果,即对各重复组内的所有平行数据结果取中位数后再计算不同平均值,地面培养皿平行结果较多,采用中位数可有效避免极端值的影响,使地面飘移数据结果代表性更强。其计算公式为:

式中Mdep% i为第组下风向距离沉积率中位数。
1.3.3 沉积/飘移率变异系数
变异系数(Coefficient of Variation,CV)可表示一组数据的离散程度,对于雾滴沉积率或飘移率,CV值可用于描述雾滴沉积和飘移分布的均匀性[27],数值越小说明雾滴分布均匀性越好。依据ISO24253-1标准其计算公式为[26]:

式中为标准差;X为沉积/飘移率平均值。
1.3.4 空间飘移指数
本研究为评价植保无人机农药喷雾空中雾滴飘失特征提出一种雾滴空间飘移指数(Airborne Drift Index,ADX)评价方法,通过计算出的ADX值来定量分析比较不同机型和喷雾参数下农药雾滴空间飘移特性。类比通过飘移潜力指数(Drift Potential Index,DIX)评估喷雾飘移风洞测试结果的方法[28-29],针对无人机采用雾滴空间飘移指数评估下风向空中飘移收集装置上的雾滴分布特性。ADX值无量纲,依据如下公式计算:
式中r为相对飘移总量,表示飘移量占施药液量的百分比,%;r为相对特征高度,表示雾滴飘移分布的中心在雾滴收集框架上的相对位置。相对飘移总量和相对特征高度分别使用公式(7)和(8)计算。


式中为空中飘移收集装置上相邻PE软管间距(0.5 m);p为每个框架上收集软管数目,p=10;dep%i为第根软管上的雾滴飘移率;h为第根软管高度,m;max为框架顶端软管高度(5.0 m)。
1.3.5 累积飘移比例和90%累积飘移距离
根据ISO 22866标准[22],累积飘移比例cum%定义为至下风向距离所有雾滴飘移量占全部雾滴飘移量total%的百分比,90%累积飘移距离90%为cum%达到90%时的下风向距离,计算方法如式(9)(10)所示。

式中dep%()为下风向处的飘移率,%;m为下风向最远飘移距离或最远端雾滴收集器距离,m。
1.4 环境气象参数
试验中各处理组标称侧风速、温度和相对湿度数据如表3所示,标称侧风速为自然风速在垂直于飞行方向的分速度,风向偏差以自然风向与垂直航线方向夹角表示,均为各气象数据平均值。标称侧风速在2.2~3.6 m/s范围内,风向偏差在−25.4°~28.7°范围,温度均在35.0 ℃以下,符合ISO 22866标准要求[22]。
2 结果与分析
2.1 冠层雾滴沉积
通过仿真葡萄园试验台冠层顶部PVC卡片测得的不同处理组雾滴沉积率和沉积率变异系数如图3所示。

注:图中数据为重复组平均值,误差线表示“±标准误差”,同一指标数据标签后不同字母代表在α=0.05水平差异显著,有相同字母表示无显著差异;TR 80-0067和IDK 120-015为不同喷头类型。下同。
从图3中可以看出:对于IDK空气射流喷头,单旋翼、6旋翼和8旋翼A型无人机沉积率在59.7%至72.0%范围内,无显著差异,仅8旋翼B型不足40%;4种机型沉积率CV值都不超过50%,前3种机型之间沉积分布均匀性虽略有不同但无显著性差异,8旋翼B型CV值较高,接近50%;对于TR空心圆锥喷头,6旋翼和8旋翼A型喷雾沉积率可达到50%左右,单旋翼次之,8旋翼B型则不足30%;4种机型沉积率CV值均高于50%,单旋翼CV值高达87.4%,雾滴分布最不均匀。由结果可知,无论安装哪种喷头,几种无人机中8旋翼B型不仅沉积率最低,分布均匀性也最差,分析是由于无人机喷头布局差异所导致的,该型无人机喷头分布于旋翼下方并且关于航线对称的两喷头间距为1.46 m,而其他机型均为喷杆式喷头布局,相邻喷头最大间距不超过1.0 m,故在1.5 m飞行高度下8旋翼B型更容易因相邻喷头叠加程度不够产生漏喷,使冠层顶部雾滴沉积率降低而变异系数增大,该无人机作业中飞行高度应适当提升至2.0 m左右以保证喷雾均匀性。因此,安装相同喷头时,不同机型间雾滴沉积率及CV值差异并不明显。但是对于全部4种机型,在2.2~3.6 m/s侧风作用下,相比于TR空心圆锥喷头,IDK空气射流喷头雾滴沉积率均有显著提高,同时CV值大幅降低,表明IDK空气射流喷头可以显著提高无人机果园作业航线下方沉积效果,优化雾滴分布均匀性。
2.2 地面雾滴飘移
试验中不同处理组中值飘移率随下风向距离变化如图4所示,使用SPSS 22.0软件(美国IBM公司)进行非线性回归分析并绘制回归曲线(图4),图5则为计算得出的平均中值飘移率AMDR值和90%累积飘移距离90%。由图4可知,无人机喷雾飘移从喷幅边缘至下风向20 m处逐渐衰减,飘移率下降最快的区域在5 m以内,20 m处飘移率均不足1.0%;获得的所有回归方程2值均大于0.95,表明指数函数回归拟合效果良好,无人机喷雾飘移率与下风向距离的关系基本满足指数函数dep%=·e·x的关系,其中,为常数项,>0,<0。

注:IDK和TR为不同类型喷头。下同。
对于不同喷头,将飘移率变化曲线结合它们的AMDR值和90%累积飘移距离(图5)综合考虑,搭载IDK空气射流喷头的无人机喷雾在下风向不同距离雾滴飘移水平均明显低于TR空心圆锥喷头处理组,相同机型作业中在施药液量为空心圆锥喷头2~3倍的情况下,飘移率还不足一半,测得的单位面积雾滴沉积量和归一化处理后的不同下风向距离飘移率都更低,此外空气射流喷头还能不同程度上减小90%累积飘移距离(除8旋翼A型,90%可下降2.0 ~5.0 m),体现出其在果园喷雾作业中特别是飞行高度高,侧风强时优秀的抗飘移性能。针对不同机型,从图4中不同下风向距离的飘移率可以发现,搭载IDK空气射流喷头时由于雾滴粒径较大(300m左右),单旋翼、6旋翼及8旋翼A型雾滴沿下风向距离飘移率水平均较低,但8旋翼A型90%值反而在各处理组中最大(11.4 m),甚至高于TR空心圆锥喷头处理组,这是由于该组不仅下风向3 m处的最高飘移率在各组中最低,其他下风向距离的飘移率水平也均较低,喷雾飘移量由高到低的变化范围相对其他组更小,造成计算出的累积飘移比例达到90%时的飘移距离较远;结合图5结果可知,各组在使用同种喷头时平均中值飘移率均没有显著性差异,仅8旋翼B型因飞行高度较低导致漏喷引起AMDR值较高,4种机型90%累积飘移距离90%在4.9~11.4 m范围内,说明植保无人机葡萄园喷雾作业缓冲区距离至少应设到15 m。

图5 各机型地面培养皿雾滴平均中值飘移率和90%累积飘移距离
2.3 近地飘移测试平台
近地飘移测试平台测得的飘移率为无人机第1条航线作业后的单喷幅飘移结果,图6与图7分别展示了近地飘移率随下风向距离变化曲线及其指数函数回归方程以及雾滴平均均值飘移率AADR值、90%累积飘移距离。

图6 近地飘移测试平台飘移率随下风向距离变化及其指数函数回归曲线

图7 各机型近地飘移测试平台雾滴平均均值飘移率和90%累积飘移距离
从图中结果可以发现:飘移率在5.0 m以内迅速下降,5.0~10 m范围内衰减速率放缓,10 m以外基本维持稳定;对于非线性回归分析结果,除处理组2和3中2值为0.89左右以外,获得的其他所有回归方程2值均大于0.92,该平台测得的近地飘移率与下风向距离的关系同样可用指数函数关系来描述;使用IDK空气射流喷头可以不同程度降低无人机喷雾在下风向不同距离的飘移率、AADR值和90%累积飘移距离,而搭载同种喷头不同机型的这3项指标则差异不大。以上结果表明,飘移测试平台测得的单喷幅近地雾滴飘移结果基本符合通过地面培养皿得到的3喷幅飘移结果。
2.4 空中飘移收集装置
图8为不同处理组在下风向2.0 m处雾滴空中飘移率在不同高度的竖直方向分布情况。飘移率竖直分布可以显示,无人机喷雾下风向空中飘移率随高度从高到底逐渐增大,TR空心圆锥喷头在接近框架底部位置飘移量几乎为全部喷洒量。总体飘移水平上看,不同机型分布表现出不同程度差异,对于IDK空气射流喷头,8旋翼B型空中飘移率较高,单旋翼次之,其他2种机型较低;对于TR空心圆锥喷头,单旋翼空中飘移率均较高,8旋翼B型次之,8旋翼A型和6旋翼飘移相对较少。无论哪种机型,IDK空气射流喷头能有效减少无人机在各高度的雾滴飘移率,部分处理组特别是TR空心圆锥喷头在飞行高度3.5 m及以上仍可收集到一定体积雾滴,计算可得单旋翼和8旋翼B型装配TR空心圆锥喷头航线平面以上飘移量甚至分别可以占到竖直装置总飘移量的14.7%和16.5%(处理组2和8),其他处理组在1.2%到8.9%范围内。此前有关无人机旋翼流场模拟研究显示,飞行速度2.0 m/s时机身下方约有30%左右的雾滴因受翼尖涡流的影响在喷杆外侧呈螺旋状运动[10],分析可知飞行高度以上部分飘移雾滴应是细雾滴随着旋翼下洗气流与外界空气共同作用产生的这种卷扬涡流飘移到PE软管上,它们大多不具有竖直向下的速度分量,难以继续下降沉积,往往会在空气中蒸发,尤其是在高温环境下,导致农药有效成分颗粒继续随风飘移至非靶标环境带来危害,表明在侧风作用下无人机果园常规喷雾作业的空中飘移风险较大。
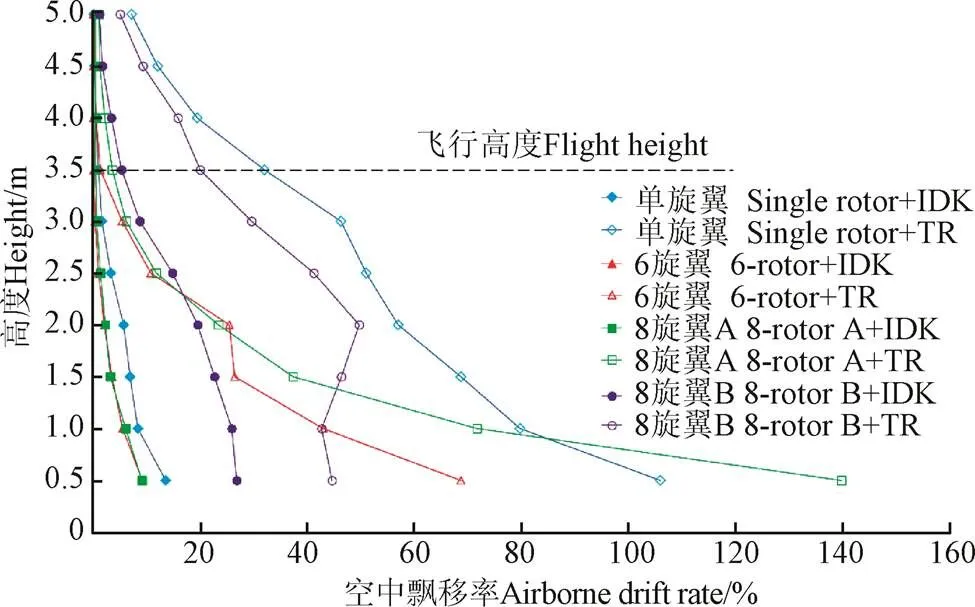
图8 各处理组不同高度下空中飘移收集装置飘移率
根据竖直方向飘移率计算得出的空间飘移指数ADX值如图9所示。图9中可以看出,相同机型无人机搭载IDK空气射流喷头的处理组空间飘移指数显著小于TR空心圆锥喷头;对于IDK空气射流喷头,下风向2.0 m处ADX值由大到小分别排序依次为8旋翼B、单旋翼、8旋翼A、6旋翼;对于TR空心圆锥喷头,ADX值由大到小排序依次为:单旋翼、8旋翼B、8旋翼A、6旋翼。该结果与竖直收集框架测试结果相符,说明ADX指数可以有效反映植保无人机喷雾雾滴在同一竖直平面的空中飘移情况;与地面培养皿和近地飘移测试平台的测试结果相比,也可发现ADX指数呈现的各组飘移率相对大小关系与它们基本一致,只是单旋翼、8旋翼B型装配TR空心圆锥喷头处理组的飘移率水平更高,这是因为两组飞行高度以上的空中飘移雾滴较多,这部分雾滴蒸发后下风向地面收集装置难以测到。

图9 各机型空中飘移测试装置空间飘移指数
另外,植保无人机旋翼下洗气流场是促进雾滴沉降沉积到靶标作物的最重要因素,也属于气流辅助喷雾方式,通常来说,下洗气流场越强则对雾滴的下压作用越明显,农药雾滴沉积率应该越高,受侧风影响的飘移损失越少。但是,从表1中4种机型净质量、药箱容量和最大起飞质量可知,正常工作状态下旋翼下洗气流场强弱顺序应为:单旋翼、8旋翼A型、8旋翼B型、6旋翼,与各机型搭载TR空心圆锥喷头时的ADX值大小排序类似,这意味着旋翼下洗气流更强时飞行状态下的卷扬涡流也更强,在涡流的裹挟作用下会有更多雾滴向航线两侧方向扩散,造成更严重的下风向飘移,表明旋翼下洗气流与外界空气共同作用产生的卷扬涡流是影响无人机喷雾飘移的重要因素。
试验中不同机型的旋翼下洗气流场存在一些差异,一般认为外界高速气流除了对雾滴产生裹挟作用以外还会使雾滴产生二次雾化导致粒径改变,但根据对单旋翼及多旋翼植保无人机下洗气流场的模拟和实测[30-32],无人机下洗气流场各位置最大风速一般不超过15 m/s,有研究表明扇形和空气射流喷头在33.3~84.7 m/s高风速下雾滴粒径及其分布会发生明显变化[33],而在低速气流下即无人机的旋翼下洗气流场是否可以改变雾滴粒径大小尚不明确,因此下一步需要继续探索旋翼风场特性对药液雾化的影响。
2.5 不同收集装置飘移测试结果分析与讨论
前文结果中发现,无论地面培养皿、冠层沉积PVC卡、近地飘移测试平台和空中雾滴飘移收集装置飘移结果都能不同程度上反映各处理组喷雾飘移特性。一般认为,收集地面飘移沉降雾滴是喷雾飘移研究中最常用且最直观反映下风向不同距离地面飘移真实值的直接测量方法[30-31],其他方法无论间接测量还是直接测量都需要将结果与田间地面飘移沉积结果进行对比分析[32-33]。因此,基于前文分析结果,将各种不同飘移收集装置测试结果与地面培养皿飘移结果使用SPSS 22.0软件进行双侧相关性检验,检验结果见表3。由表中数据可知,在本文试验条件下,无人机果园喷雾地面培养皿AMDR值与冠层PVC卡测得的沉积率和沉积率CV值、近地飘移测试平台AADR值以及空间飘移指数ADX值均表现出显著相关关系(<0.05),其中与冠层沉积率成显著负相关(<0),与其他3个指标都成极显著正相关(<0.01,>0);地面培养皿90%累积飘移距离与近地飘移测试平台90%累积飘移距离呈现极显著正相关关系(<0.01,>0)。此结果表明:对于沉积分布结果,沉积率越小,分布均匀性越差,喷雾飘移率越高;对于近地飘移平台结果,AADR值和90%累积飘移距离越大表示飘移风险越高;对于空中飘移测试装置,空间飘移指数ADX值越大说明喷雾飘移水平越高。
根据各收集装置获得测试指标之间的相关性结果,以与地面培养皿飘移结果具有显著相关关系的指标作为自变量,AMDR值与90%值作为因变量,进行回归分析,回归分析结果如表4所示。表中结果显示,除冠层沉积率回归拟合优度稍差以外(可决系数2不足0.6),其他指标回归方程2均大于0.8,AMDR值与飘移测试平台AADR值、AMDR值与ADX值以及2种90%累积飘移距离之间回归方程2都可超过0.9,拟合优度较高。

表4 试验中不同收集装置飘移测试结果相关性分析结果
注:本文取显著性水平=0.05,表中“**”代表极显著,“*”代表显著。
Note: Significance level at=0.05is taken in this study. ‘**’ represents very significant and ‘*’represents significant.

表5 地面培养皿平均中值飘移率和90%累积飘移距离与其显著相关因素回归分析结果
注:回归方程中90%-P为地面培养皿测得的90%累积飘移距离,90%-B为近地飘移测试平台测得的90%累积飘移距离。
Note:90%-Prepresents 90% cumulative drift distance measured via ground petri dish and90%-Brepresents that via field drift test bench.
以上结果表明,冠层PVC卡测得的沉积分布结果以及近地飘移测试平台、空中雾滴飘移收集装置获取的喷雾飘移结果均与地面培养皿测得结果表现出显著相关关系,田间近地飘移平台和空中飘移装置测试不仅能获取竖直方向和下风向飘移雾滴分布,还能分别用于推算下风向飘移AMDR值和90%累积飘移距离,有效评估植保无人机喷雾下风向地面飘移特性。因此,据此可对植保无人机田间喷雾飘移测试方法进行优化或简化,在具备完整试验条件时,除地面飘移收集装置以外,增加平行于航线的下风向空中飘移收集装置,以获取竖直方向空中雾滴飘移分布,将航线高度以上雾滴飘移量纳入飘移特性评估中,提高测试结果完整度和可信度;在不具备完整试验条件时,仅通过布置垂直于航线方向的近地飘移测试平台和空中飘移收集装置(或二选一),就能在获得真实可信测试结果的前提下大幅度减少飘移测试工作量、用水量和荧光示踪剂等耗材用量,充分利用田间不可控的气象条件,节约科研成本并提高田间试验效率。
3 结 论
本文提出了一种基于仿真果园试验台的植保无人机施药雾滴飘移测试方法,采用该方法对4种典型植保无人机搭载IDK 120-015空气射流喷头和TR 80-0067空心圆锥喷头进行了实际作业喷雾飘移测试,针对不同飘移测试收集装置获得的结果进行分析和比较,主要结论如下:
1)在侧风速2.4~3.6 m/s,温度29.8~34.3 ℃,相对湿度10.7~30.6%的环境条件下,在高度1.5 m(距地面3.5 m)、速度2.0 m/s参数下IDK空气射流喷头可显著降低下风向雾滴飘移水平,优化沉积分布均匀性,提高农药雾滴利用率;4种机型飘移特性无显著差异,旋翼下洗气流产生的卷扬涡流是影响无人机喷雾飘移的重要因素,葡萄园喷雾作业缓冲区至少应设置为15 m。
2)植保无人机喷雾飘移率与下风向距离之间关系模型可用指数函数来描述。
3)冠层沉积率越小、沉积分布变异系数越大、近地飘移测试平台AADR值和90%累积飘移距离越大以及空间飘移指数ADX值越大均能说明雾滴飘移风险越高,3种飘移测试收集装置及其评价指标均可有效评估植保无人机喷雾下风向飘移特性;雾滴空间飘移指数ADX计算方法适合定量计算及分析比较不同机型和作业参数下喷雾农药雾滴空间飘移特性,可为果园专用植保无人机设计、研发及应用提供数据支持。
后续将进一步通过大量田间试验获取数据来明确针对不同施药参数和环境参数的飘移率与下风向距离关系模型常数项数值,探索建立植保无人机喷雾飘移模型,为植保无人机果园喷雾田间作业参数的选择提供参考。
[1] He X. Rapid development of unmanned aerial vehicles (UAV) for plant protection and application technology in China[J]. Outlooks on Pest Management, 2018, 29(4): 162-167.
[2] Lan Y, Chen S. Current status and trends of plant protection UAV and its spraying technology in China[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1): 1-9.
[3] He X, Bonds J, Herbst A, et al. Recent development of unmanned aerial vehicle for plant protection in East Asia[J]. Int J Agric & Biol Eng, 2017, 10(3): 18-30.
[4] 王昌陵,何雄奎,王潇楠,等. 基于空间质量平衡法的植保无人机施药雾滴沉积分布特性测试[J]. 农业工程学报,2016,32(24):89-97.
Wang Changling, He Xiongkui, Wang Xiaonan, et al. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of deposition quality balance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 89-97. (in Chinese with English abstract)
[5] 王献伟. 何雄奎呼吁:我国植保机械研发厂家应重视农药飘失问题[J]. 农药市场信息,2019,26(18):19-20.
[6] Griesang F, Decaro R A, Dos Santos C A M, et al. How much do adjuvant and bozzles models reduce the spraying drift? Drift in agricultural spraying[J]. American Journal of Plant Sciences, 2017, 8(11): 2785-2794.
[7] 王潇楠,何雄奎,王昌陵,等. 油动单旋翼植保无人机雾滴飘移分布特性[J]. 农业工程学报,2017,33(1):117-123.
Wang Xiaonan, He Xiongkui, Wang Changling, et al. Spray drift characteristics of fuel powered single-rotor UAV for plant protection[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 117-123. (in Chinese with English abstract)
[8] Wang X, He X, Song J, et al. Drift potential of UAV with adjuvants in aerial applications[J]. Int J Agric & Biol Eng, 2018, 11(5): 54-58.
[9] Herbst A, Bonds J, Wang Z, et al. The influence of unmanned agricultural aircraft s ystem design on spray drift[J]. Journal of Cultivated Plants, 2020, 72(1): 1-11.
[10] 文晟,韩杰,兰玉彬,等. 单旋翼植保无人机翼尖涡流对雾滴飘移的影响[J]. 农业机械学报,2018,49(8):127-137,160.
Wen Sheng, Han Jie, Lan Yubin, et al. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 127-137, 160. (in Chinese with English abstract)
[11] Yang F, Xue X, Cai C, et al. Numerical simulation and analysis on spray drift movement of multirotor plant protection unmanned aerial vehicle[J]. Energies, 2018, 11(9): 2399.
[12] 张豪,祁力钧,吴亚垒,等. 无人机果树施药旋翼下洗气流场分布特征研究[J]. 农业工程学报,2019,35(18):44-54.
Zhang Hao, Qi Lijun, Wu Yalei, et al. Distribution characteristics of rotor downwash airflow field under spraying on orchard using unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(18): 44-54. (in Chinese with English abstract)
[13] 陈盛德,兰玉彬,周志艳,等. 小型植保无人机喷雾参数对橘树冠层雾滴沉积分布的影响[J]. 华南农业大学学报,2017,38(5):97-102.
Chen Shende, Lan Yubin, Zhou Zhiyan, et al. Effects of spraying parameters of small plant protection UAV on droplets deposition distribution in citrus canopy[J]. Journal of South China Agricultural University, 2017, 38(5): 97-102. (in Chinese with English abstract)
[14] 刘德江,龚艳,王果,等. 果园航空喷雾的农药沉积分布比较[J]. 江苏农业科学,2018,46(6):207-211.
Liu Dejiang, Gong Yan, Wang Guo, et al. Comparison of pesticide deposition distribution of unmanned aerial vehicle in orchard[J]. Jiangsu Agricultural Sciences, 2018, 46(6): 207-211. (in Chinese with English abstract)
[15] Sarri D, Martelloni L, Rimediotti M, et al. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard[J]. Journal of Agricultural Engineering, 2019, 50(1): 38-47.
[16] 刘琪,兰玉彬,单常峰,等. 航空植保喷施参数对苹果树雾滴沉积特性影响[J]. 农机化研究,2020,42(9):173-180.
Liu Qi, Lan Yubin, Shan Changfeng, et al. The influence of spraying parameters of aerial application on droplet deposition characteristics for apple fields[J] Journal of Agricultural Mechanization Research, 2020, 42(9): 173-180. (in Chinese with English abstract)
[17] Li L, Liu Y, He X, et al. Assessment of spray deposition and losses in the apple orchard from agricultural unmanned aerial vehicle in China[C]//2018 ASABE Annual International Meeting, Detroit, USA, Paper Number:1800504.
[18] Brown C R, Giles D K. American Society of Agricultural and Biological Engineers, 2018. Measurement of pesticide drift from unmanned aerial vehicle application to a vineyard[J]. Transactions of the ASABE, 2018, 61(5): 1539-1546.
[19] Martinez-Guanter J, Agüera P, Agüera J, et al. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards[J]. Precision Agriculture, 2020, 21(1): 226-243.
[20] 王昌陵,何雄奎,王潇楠,等. 无人植保机施药雾滴空间质量平衡测试方法[J]. 农业工程学报,2016,32(11):54-61.
Wang Changling, He Xiongkui, Wang Xiaonan, et al. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 54-61. (in Chinese with English abstract)
[21] Wang C, He X, Wang X, et al. Testing method and distribution characteristics of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J]. Int J Agric & Biol Eng, 2018, 11(2): 18-26.
[22] International Organization for Standardization. ISO 22866 Equipment for crop protection - Methods for field measurement of spray drift[S]. Geneva: ISO copyright office, 2005.
[23] International Organization for Standardization. ISO 22401 Equipment for crop protection - Method for measurement of potential spray drift from horizontal boom sprayers by the use of a test bench[S]. Geneva: ISO copyright office, 2015.
[24] Douzals J-P, Tinet C, Goddard R. Use of a flexible drop counter for a better comparability of potential spray drift measurement protocols in wind tunnels[J]. Aspects of Applied Biology International Advances in Pesticide Application, 2018, 137(1): 277-284.
[25] 何雄奎. 我国植保无人机的研究与发展应用浅析[J]. 农药科学与管理,2018,39(9):10-17.
He Xiongkui. Brief analysis on the research, development and application of plant protection UAV in China[J]. Pesticide Science and Administration, 2018, 39(9): 10-17. (in Chinese with English abstract)
[26] International Organization for Standardization. ISO 24253-1 Crop protection equipment - Spray deposition test for field crop[S]. Geneva: ISO copyright office, 2015.
[27] Smith D B. Uniformity and recovery of broadcast sprays using fan nozzles[J]. Transactions of the American Society of Agricultural Engineers, 1992, 35(1): 39-44.
[28] Helck C, Herbst A. Drift potential index-a new parameter for the evaluation of agricultural nozzles concerning their drift potential[J]. Nachrichtenbl. Deut. Pflanzenschutzd, 1998, 50(9): 225-232.
[29] Herbst A. A method to determine spray drift potential from nozzles and its link to buffer zone restrictions[C]//2001 ASAE Annual International Meeting. Sacramento, California, USA: 01-1047.
[30] Zhang S C, Xue X Y, Sun Z, et al. Downwash distribution of single-rotor unmanned agricultural helicopter on hovering state[J]. Int J Agric & Biol Eng, 2017, 10(5): 17-27.
[31] 王军锋,徐文彬,闻建龙,等. 大载荷植保无人直升机喷雾气液两相流动数值模拟[J]. 农业机械学报,2017,48(9):62-69.
Wang Junfeng, Xu Wenbin, Wen Jianlong, et al. Numerical simulation on gas-liquid phase flow of large-scale plant protection unmanned aerial vehicle spraying[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2017, 48(9): 62-69. (in Chinese with English abstract)
[32] 杨知伦,葛鲁振,祁力钧,等. 植保无人机旋翼下洗气流对喷幅的影响研究[J]. 农业机械学报,2018,49(1):116-122.
Yang Zhilun, Ge Luzhen, Qi Lijun, et al. Influence of UAV rotor down-wash airflow on spray width[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2018, 49(1): 116-122. (in Chinese with English abstract)
[33] 唐青,陈立平,张瑞瑞,等. 高速气流条件下标准扇形喷头和空气诱导喷头雾化特性[J]. 农业工程学报,2016,32(22):121-128.
Tang Qing, Chen Liping, Zhang Ruirui, et al. Atomization characteristics of normal flat fan nozzle and air induction nozzle under high speed airflow conditions[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(22): 121-128. (in Chinese with English abstract)
[34] Nuyttens D, De Schampheleire M, Verboven P, et al. Comparison between indirect and direct spray drift assessment methods[J]. Biosystems Engineering, 2010, 105(1): 2-12.
[35] Torrent X, Gregorio E, Douzals J P, et al. Assessment of spray drift potential reduction for hollow-cone nozzles: Part 1. Classification using indirect methods[J]. Science of the Total Environment, 2019, 692: 1322-1333.
[36] Nuyttens D, Zwertvaegher I K A, Dekeyser D. Spray drift assessment of different application techniques using a drift test bench and comparison with other assessment methods[J]. Biosystems Engineering, 2017, 154: 14-24.
[37] Torrent X, Garcerá C, Moltó E, et al. Comparison between standard and drift reducing nozzles for pesticide application in citrus: Part I. Effects on wind tunnel and field spray drift[J]. Crop Protection, 2017, 96: 130-143.
Measuring method and experiment on spray drift of chemicals applied by UAV sprayer based on an artificial orchard test bench
Wang Changling1,2, He Xiongkui1,3※, Zeng Aijun1,3, Andreas Herbst4, Supakorn Wongsuk1,3, Qiao Baiyu1,3, Zhao Cheng1,3, Yuan Shankui5, Zhong Ling6, Verena Overbeck4, Jane Bonds7, Yang Yi8, Zhou Guoqiang9, Wang Xuan10, Gao Wanlin2
(1.1001932.1001933.1001934.D-381045.1001256.330096,7;81022029.45500110518057)
In recent years, low-altitude and low-volume plant protection operations using unmanned aerial vehicle (UAV) sprayer developed rapidly in China with the advantages of high efficiency, labour saving, high safety, high terrain adaptability, high flexibility, water and chemicals saving, and high intelligence. With the UAV application technology in field crops is becoming more and more mature, aerial spraying operations in orchards are promising and in the ascendant, but a high risk of UAV spray drift is appearing due to high working height and fine droplets sprayed in slope orchards, highlighting the necessity of the study on the spray drift characteristics of UAV chemicals application for fruit trees. Therefore, based on previous research, a novel type of measuring method of spray drift for UAV chemicals application in orchard was proposed in this study and an artificial orchard test stand (vineyard) and 3 airborne drift frame collectors were designed and built, and a set of field drift test bench was firstly used to collect aerial spray drift droplets at different downwind distances, together with ground drift collectors and canopy deposition collectors. An airborne drift index (ADX) of UAV’s spray was initially applied for quantitative analysis to compare spray drift characteristics of different models of unmanned aircrafts and variable operation parameters. Fluorescence tracer Pyranine water solution was prepared at the concentration of 0.1% as the spray liquid. Four typical types of plant protection UAV (a single-rotor oil-powered helicopter, a 6-rotor motor drone and two models of 8-rotor motor drones) equipped with conventional hollow cone nozzle ‘TR 80-0067’ and air-induction anti-drift nozzle ‘IDK 120-015’were tested in the artificial vineyard, and results of canopy deposition distribution, ground sediment drift, near-ground drift, and airborne drift were obtained and analysed, and different sampling collectors for spray drift were evaluated and compared. The results showed that: Under the environmental conditions that the nominal crosswind speed was 2.4-3.6 m/s, the temperature was 29.8-34.3 ℃ and relative humidity was 10.7%-30.6%, at the flight height of 1.5 m (3.5 m from the ground) and the speed of 2.0 m/s the air-induction nozzle IDK can significantly reduce the level of downwind spray drift of UAV, optimize the uniformity of deposition distribution and increase the effective utilization rate of chemicals; There was no significant difference in the drift characteristics of the 4 types of unmanned aircraft, and the vortex generated by the combination of the rotor’s downwash airflow and the external wind was an important factor on spray drift; Buffer zone of UAV aerial spraying operation in vineyards should be set at at least 15 m; The lower the canopy deposition rate (<0.05,<0), the worse the uniformity of deposition distribution (<0.01,>0), the larger the average average drift rate (AADR) and 90% cumulative drift distance90%of the field drift test bench (<0.01,> 0), the greater the ADX value (<0.01,> 0) all indicated the higher spray drift risk, respectively; Both these sampling collectors and their evaluation index could assess the downwind drift characteristics effectively; the relationship between the UAV spray drift ratedep%and the downwind distancewas described by the exponential function. The results of this study are expected to provide references and data supports for the R&D of UAV dedicated for orchard spraying, the formulation of standards on spray drift field measuring method for UAV orchard operations and the selection of aerial application working parameters in orchards.
unmanned aerial vehicle; experiment;spray; downwind; airborne drift; groundsediment drift; measuring method
王昌陵,何雄奎,曾爱军,等. 基于仿真果园试验台的植保无人机施药雾滴飘移测试方法与试验[J]. 农业工程学报,2020,36(13):56-66.doi:10.11975/j.issn.1002-6819.2020.13.007 http://www.tcsae.org
Wang Changling, He Xiongkui, Zeng Aijun, et al. Measuring method and experiment on spray drift of chemicals applied by UAV sprayer based on an artificial orchard test bench[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(13): 56-66. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.13.007 http://www.tcsae.org
2020-02-25
2020-06-01
国家重点研发计划资助(2017YFD02003);国家自然科学基金资助项目(31761133019);中国博士后科学基金资助项目(2019M650907)
王昌陵,博士后,主要从事低空低量植保施药技术研究。Email:WCL1991@cau.edu.cn
何雄奎,教授,博士生导师,主要从事植保机械与施药技术研究。Email:xiongkui@cau.edu.cn
10.11975/j.issn.1002-6819.2020.13.007
S252+.3
A
1002-6819(2020)-13-0056-11
猜你喜欢
作物杂志(2022年3期)2022-07-06
新疆农业科学(2021年11期)2021-12-23
农业机械学报(2021年11期)2021-12-07
核农学报(2020年11期)2020-12-04
考试与评价·高二版(2020年4期)2020-09-10
知识就是力量(2020年2期)2020-05-19
少年文艺·我爱写作文(2019年8期)2019-09-12
发明与创新·大科技(2019年2期)2019-06-26
中国诗歌(2018年6期)2018-11-14
美与时代·美术学刊(2017年3期)2017-05-22