
基于改进相位相关算法的图像匹配*
2020-08-11 00:46衣家欣王金鹤
计算机与数字工程 2020年6期
衣家欣 王金鹤
(青岛理工大学信息与控制工程学院 青岛 266033)
1 引言
随着信息化的发展,计算机视觉得到了广泛的关注与研究。图像处理则是计算机视觉的重要分支,图像处理在众多领域中被广泛应用,譬如,目标追踪、医学图像处理、三维重建、人工智能等[1]。
图像处理主要有:图像获取、信息采集及处理、图像特征、图像分割以及图像匹配。在图像处理的过程中,任何步骤都可能产生误差,从而影响图像的处理效果。如何减少甚至避免误差,成为图像处理中的研究重点。本文则主要从图像匹配方面进行讨论研究。
图像匹配的算法种类很多,基本的匹配算法有特征匹配、区域匹配、像素匹配、相位相关匹配等算法[2]。采用单一匹配算法进行图像匹配,则算法的缺点极易造成匹配结果的偏离。利用不同算法相结合的方式,既可以弥补各自算法的缺点,也可以体现算法的优势。文中采用的即是区域匹配算法与相位相关算法相融合的改进算法。
文献[6]中采用相位信息进行匹配,相位的获取依赖于滤波器,容易出现相位奇点、相位卷绕等问题,影响匹配结果。文献[8]中采用特征匹配与区域匹配相结合的算法,特征匹配算法与区域算法的收敛速度都较快但匹配精度都不是很理想。针对以上匹配性能方面的局限性问题,提出一种改进相位相关算法。该算法利用区域算法进行初步匹配锁定大致匹配范围,再利用相位相关算法进行精确匹配,得到准确的匹配位置。
2 匹配算法
2.1 特征匹配算法
特征匹配算法作为图像匹配的常用算法,分为两种:一基于特征点;二基于特征线段[4]。
本文利用的为特征点的提取,通过提取的特征点在图像中匹配相同或者相似的图像位置的过程。特征匹配算法中选择Canny算子作为特征提取算子,Canny算子是一个具有滤波、增强、检测多层次的边缘优化算子[5]。Canny算子与其他边缘算子相比较,Canny算子的抗干扰性更强,Canny算子在抗干扰方面更具有优势,边缘处理效果图更清晰。算法中将搜索图进行区域分割,将每个子图进行边缘特征提取,与模板图像的边缘特征信息进行匹配,初步锁定搜索子图。

图1 搜索边缘图

图2 模板边缘图
算法中Canny算子的阈值lowthes=0.2,highthres=0.5,高斯平滑sigma=5.0。通过Canny边缘算子提取后,得到图1、图2两幅边缘图像。边缘图像的特征提取可以通过调整阈值的大小进行改变,阈值参数的改变会对图像匹配结果产生影响。将得到的边缘图像作为后续区域匹配的操作对象,可以缩短分层算法的搜索时间。
2.2 区域匹配算法
区域匹配算法作为粗匹配,将搜索边缘图像进分割成子图像,子图像与模板边缘图进行匹配。区域匹配算法的匹配代价采用的为SAD(sum of absolute differences):

M为搜索图像的尺寸,将模板图R(x,y)叠放在搜索图上进行搜索,L(x,y)为当前搜索子图。
2.3 相位相关匹配算法
相位相关技术是一种非线性、基于离散傅里叶变换的品与相关技术,相位相关函数可以用来度量两图之间的相似度[6]。假设模板图像R(x,y)及搜索子图L(x,y)的互功谱为

FL(u,v)与FR(u,v)为模板与子图的离散傅里叶变换,*为共轭符号。归一化后便得到对应的相位谱:

Qx、Qy为搜索图与模板图R(x,y)的基于傅里叶变换的相位谱。相位谱中包含了图像间位置平移的所有信息,得到的相位谱是位于图像间偏移(u,v)处的W脉冲函数。由于,相位相关面H(u,v)的形状与Δ函数的形状相近,由此使得算法在匹配精度上具有较高的算法优势。
2.4 算法结合
将两图像进行特征提取,区域匹配去特征图像进行第一次匹配,确定图像匹配的大致位置,利用相位相关算法对图像进行精确匹配,得到精确地匹配位置。特征算子采用Canny算子能有效地避免噪音的影响,同时,加入了高斯平滑处理增加了图像的抗干扰性。区域匹配算法简单易实现,作为算法的第一层匹配能够有效地提高算法的收敛速度。相位相关匹配算法是一种应用十分广泛的匹配方法,对噪声敏感度较低,匹配过程中完全是利用图像间的相位相关信息,不依赖其他的图像信息。因此,该算法得到的匹配结果不易光照等其他外界因素的影响,算法具有较好的鲁棒性。
2.5 算法实现
算法流程:
{
读取图像;
边界处理将搜索图像补0;
对搜索图像以及模板图像使用Canny算子进行特征提取,得到两图像的边缘特征图;
利用区域匹配算法对特征图像进行第一层匹配,得到大致的匹配位置;
利用相位相关匹配算法在第一层匹配位置的周围,对图像进行第二层的精确匹配;
选择匹配度最高的图像位置,则为图像最佳匹配位置;
红色线标记最佳匹配位置;
}
3 实验结果分析
模板图像的大小为66*66,模板图像为231*185,文中采用的是区域算法与相位相关匹配算法相结合的算法,先利用区域分割,将搜索图像进行分割成66*66的子图像,提取每个子图像以及模板图像的相位信息,与模板图像进行信息匹配,找到最佳匹配位置。

表1 算法测试表
图3为使用区域匹配算法进行匹配,将搜索图划分为子图像,子图与模板图像采用公式SAD进行区域匹配。从表1中可以看出,算法的匹配速度较快,但从图3中明显看出,算法的准确性很差,得到匹配位置与实际匹配位置偏离比较大。
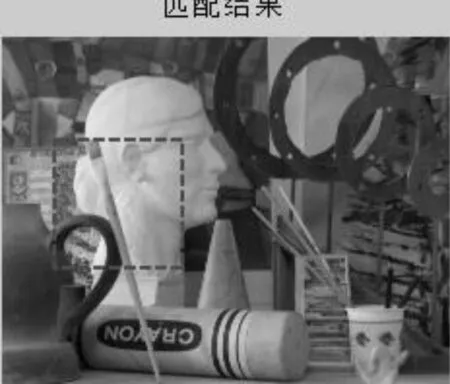
图3 区域算法匹配图
图4为单纯使用相位相关算法得到的匹配图。相位相关算法的匹配精度比较高,但从表中看出匹配速度上仍有改进的空间。
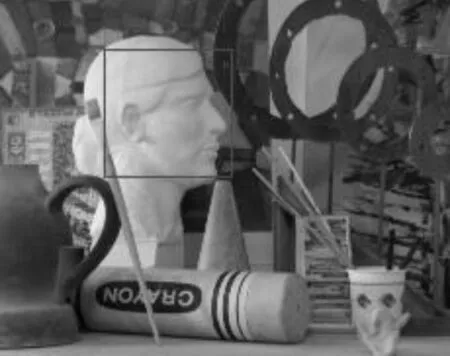
图4 相位相关算法匹配图
图5为采用改进相位相关算法进行匹配得到的结果图,从图中可以看出,匹配准确性较高。从表1中可以看出,文中改进相位算法与未改进的相位算法相比的匹配时间大大缩短缩短。
利用区域匹配与相位相关算法相结合的改进相位相关算法,可以明显提高算法的精准度,保证算法的匹配时间。改进的相位相关算法巧妙的结合了两种算法的优势,有效地规避了算法的缺点。
图5 改进相位算法匹配图
图6 模板图
4 结语
计算机视觉是目前应用十分广泛的方向,图像匹配则是其中的重要技术之一[11]。本文算法通过融合Canny算子优化算法的抗干扰性能力;利用特征边缘图作为区域匹配的操作对象,有效的提高了算法的匹配速度,增强算法的收敛性;相位相关算法对图像进行精确匹配,提高了算法的匹配精度,增强了算法的寻优能力。利用改进相位相关匹配算法使得算法在精准度方面有了明显的改善,同时匹配速度与未改进之前提高了31%。总之,文章提出的改进相位相关算法是一个准确且快速的匹配算法。
猜你喜欢
计算机技术与发展(2022年5期)2022-05-30
现代临床医学(2022年2期)2022-04-19
计算技术与自动化(2022年1期)2022-04-15
云南大学学报(自然科学版)(2022年1期)2022-02-21
小型微型计算机系统(2021年10期)2021-02-28
校园英语·上旬(2020年1期)2020-05-09
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
科技风(2019年13期)2019-06-11
卷宗(2017年16期)2017-08-30
