基于双曲正切函数的小客车换道轨迹模型
2020-08-08 08:59潘兵宏
江苏大学学报(自然科学版) 2020年4期
潘兵宏,王 烨
(1.长安大学 公路学院,陕西 西安 710064;2.长安大学 特殊地区公路工程教育部重点实验室,陕西 西安 710064)
车辆的跟驰(car following)行为和换道(lane changing)行为是汽车行驶过程中的两项最基本的驾驶行为[1],分别控制着车辆行驶过程中的纵向和侧向运动.经过60多年的发展,跟驰行为取得了许多有重要意义的研究成果并被广泛应用.相对于跟驰行为,换道行为过程更加复杂,受制于数据采集技术的限制,因此关于换道行为的研究成果较少,且难以广泛应用[2].传统的换道模型主要关注驾驶员的换道意图识别,车道选择行为、间隙可接受判别和加减速行为.袁伟等[3]通过实际道路驾驶试验建立了基于多证据理论确认识别框架,侯海晶[4]基于混合高斯马尔可夫模型和支持向量机建立了驾驶人换道意图识别模型对驾驶人的换道意图进行识别.聂建强[5]采用深度前馈神经网络集成方法对目标选择问题和间隙可接受判别问题进行建模分析,预测高速公路自主性换道的纵向加速度.
除此之外,近年来一些学者提出了基于最小安全距离和碰撞条件的安全换道模型和基于MATLAB等仿真软件的元胞自动机模型[6-7].杨刚[8]通过建立车辆安全距离模型实现对车辆轨迹的约束,并通过MATLAB和CarSim联合仿真平台进一步证明了控制策略的有效性.李珣等[9]建立了基于元胞自动机模型的协同换道规则模型,研究了车路协同环境下车辆换道行为.
随着数据采集技术的不断进步,且研究者们逐渐意识到真实的车辆换道轨迹数据对换道轨迹模型研究的重要性,一些研究者开始使用全球定位系统GPS、加速度传感器、角度传感器、摄像机、无人机等多种采集设备来收集详细车辆换道轨迹数据,包括速度、加速度、位置、方向盘转角等.美国NG-SIM项目通过相机拍摄视频采集了详细的车辆跟驰和换道行为轨迹数据[10],张颖达等[11]选用该数据在平滑处理的基础上,构建半对数模型和五次多项式模型分析换道行为微观特征.然而,只有少量学者对车辆详细的换道轨迹进行了研究.裴玉龙等[12]提出了β样条曲线反求算法对车道变换期望运行轨迹进行仿真研究,杨志刚等[13]提出了结合等速偏移轨迹模型和正弦函数换道轨迹提出了一种新的换道模型.上述换道轨迹模型虽然能够实现数据与建模结果的匹配,但大部分都是通过单纯的数学方程来对轨迹数据进行拟合,其模型与驾驶人的驾驶行为相关性较小,模型参数不具有实际物理意义.并且上述研究主要建立在仿真数据的基础上,难以和实际驾驶情况相匹配,且存在一些潜在的误差.
本研究首先通过无人机拍摄的高清影像视频中提取大量的高速公路车辆换道轨迹数据.通过分析这些数据,对比分析不同轨迹换道时间和纵向平均速度发现,不同的换道情景下换道轨迹存在较大差异,但也呈现出一定的规律性.在此基础上,建立了一种新的车辆换道轨迹模型,并进一步对模型进行综合分析和评价.
1 数据准备
1.1 数据采集
选取西安市连霍高速距离芷阳立交出口附近100~400 m范围内(如图1所示)为本研究数据采集路段.连霍高速为设计速度120 km·h-1的双向八车道高速公路,数据采集路段位于出口位置预告标志与出口位置之间,该范围内车辆换道行为较集中,有利于换道数据的提取.采集时间内高速公路路况良好,连霍高速内侧两车道为客车道,外侧为货车道,路段车道限速如图1所示,

图1 数据采集路段限速情况
无人机交通信息采集系统主要部件包含了飞行器、云台、图像传输系统、相机.在2019年4月10日的9:00—10:30和15:00—16:30,使用无人机交通信息采集系统对该范围路段的交通流进行拍摄.
1.2 视频数据分析
通过Simi-Motion软件可以从拍摄的视频中获得换道车辆的相关轨迹数据.由于Simi-Motion软件是通过对视频数据的每帧图像进行处理和分析,一次性导入的数据不应过大,因此首先通过人工剪辑将视频成为包含有完整换道过程的短视频,然后再进行数据提取.本研究中只提取了小客车的换道轨迹数据,数据样本中剔除不完全换道、受干扰导致换道持续时间较长和连续多次换道的车辆轨迹.
根据无人机拍摄视频取5 min为一个时间段,将小客车、中型车和大型车分别按照1.0,1.5和2.0的折算系数采用出入量法得到拍摄时间段内交通量情况和小客车车型比例如图2所示.

图2 折算交通量和小客车车型比例变化图
由图2可知4个车道每5 min的折算交通量介于[340,400]辆;小客车车型比例为70%左右,拍摄时间段内拍摄路段内折算交通量和小客车车型比例相对稳定,测试时间段内该路段各换道车辆具有相似的交通流条件.
通过Simi-Motion软件,每一个换道车辆样本在每个时刻的横向和纵向的瞬时速度、加速度和位置信息可以直接导出并存储为excel文件.文中将换道行为分为左换道(LLC)和右换道(RLC)分别进行研究,通过得到的样本轨迹数据文件中的车辆横向位置连续发生变化的起终点位置作为判断车辆换道的起终点的重要依据.文中共采集车辆换道数据83组,包含左换道52组和右换道31组.经处理后得到的换道车辆样本数据如表1所示.
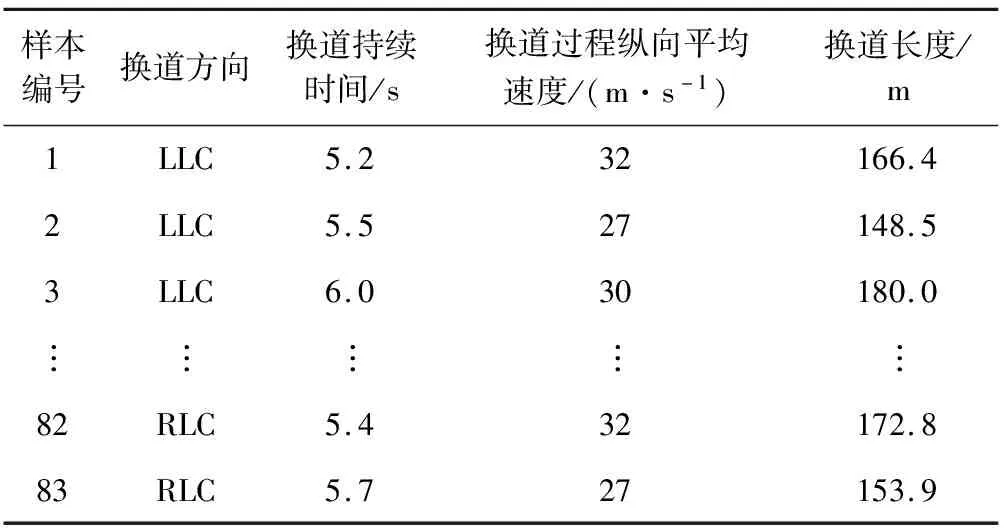
表1 换道车辆数据汇总表
2 车辆换道特性分析
2.1 换道持续时间
换道车辆换道持续时间分布如图3所示.由样本轨迹数据可知,52组左换道持续时间为5.2~6.8 s,平均换道持续时间5.8 s;31组右换道持续时间为5.2~7.7 s,平均换道持续时间6.1 s.右换道持续时间略长于左换道持续时间,但相同路段内左换道次数明显多于右换道的次数,两类换道持续时间频率服从偏正态分布.

图3 换道持续时间分布图
2.2 纵向平均速度
换道车辆纵向平均速度分布如图4所示.
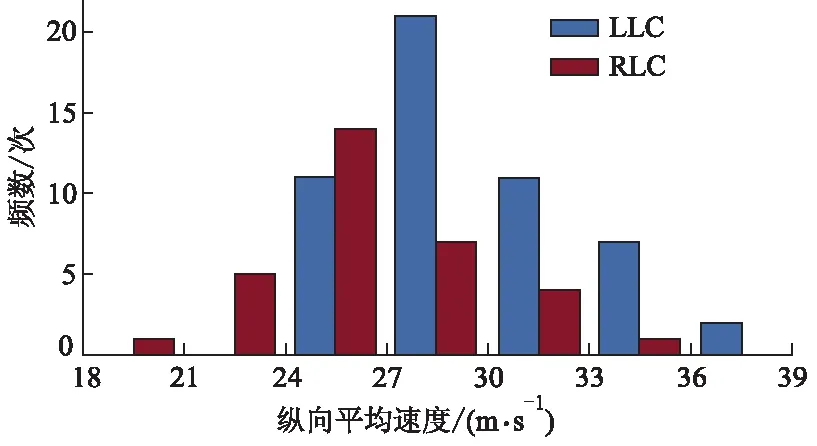
图4 纵向平均速度分布图
由样本轨迹数据可知,52组左换道纵向平均速度为24.7~38.6 m·s-1,平均换道纵向平均速度为30.3 m·s-1(110 km·h-1);31组右换道纵向平均速度为19.7~34.2 m·s-1,平均换道纵向平均速度为25.8 m·s-1(93 km·h-1).左换道纵向平均速度明显大于右换道纵向平均速度,两类换道纵向平均速度频率服从偏正态分布.通过视频分析发现车速分布结果与数据采集地高速公路车道限速情况和车道车型比例等因素有关,左侧车道限速值高于右侧车道,左侧车道大型车比例小于右侧车道,因此左换道车辆的平均纵向速度明显高于右换道.
2.3 车辆运行轨迹
换道车辆相对于车道线横向位置随时间变化分布如图5所示.图5中车辆横向位置是换道车辆相对于原车道和目标车道之间车道线的横向距离,左换道车辆起始点横向位置为负,终点处为正,右换道与之相反.
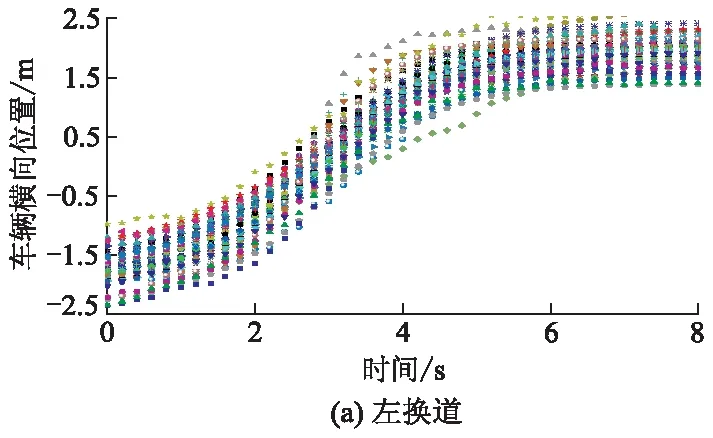
图5 车辆横向位置变化图
3 模型的建立
3.1 轨迹模型表达式
通过分析车辆轨迹的拟合结果,提出了一种新的适用于小客车的换道轨迹模型,该模型采用双曲正切函数来描述驾驶员在换道过程中车辆的横向位置[14]:
(1)
(2)
(3)
式中:x(t)表示车辆是相对于原车道与目标车道间车道线的横向距离;x0和xT分别表示车辆换道轨迹起终点处车辆相对于车道线的横向位置;Ld表示车辆换道长度;Vd表示换道过程纵向平均速度;α和δ是与x0和xT相关的系数;τ是本模型中用来表征换道紧急情况的参数.
双曲正切函数换道轨迹模型本质上是描述车辆横向位置随时间的变化情况,通过确定模型中的参数值,就可以确定完整的车辆换道轨迹模型.与以往换道轨迹模型相比,这些参数具有实际的物理意义,α和δ取决于车辆换道起终点的车辆位置,τ是本模型中用来表征换道紧急情况和驾驶风格的参数.这些参数是由周围的交通状况,换道紧急程度和驾驶员驾驶风格和习惯所决定的,这些参数能够反映不同驾驶员在不同的换道情境下换道轨迹之间的差异性,这与文中之前轨迹数据分析的结果相一致.
利用双曲正切函数换道轨迹模型对83条轨迹数据分别进行拟合,拟合结果如图6所示.使用双曲正切函数对单个换道轨迹模型的拟合精度高,R2值均大于99%,得到的轨迹模型参数分布情况如表2所示.

图6 车辆换道轨迹拟合图

表2 车辆换道轨迹拟合结果参数表
3.2 模型中参数τ的敏感性分析
本研究进一步分析了模型中参数τ的敏感程度.选取理想的换道情况下,车辆从原车道中心行驶到目标车道中心,取参数Ld=200 m;Vd=120 km·h-1;δ=0;α=3.75/2,则τ的取值分别为3.0,4.5和7.0,在相同换道情境下,对比τ取值不同的换道轨迹的差异性.拟合函数为
(4)
分析不同参数τ的车辆换道轨迹横向位移、横向速度和横向加速度的变化情况,如图7所示.由图可知:τ的值越小,车辆换道轨迹的波动越小,换道轨迹越平缓;τ越大,车辆换道轨迹横向速度峰值、横向加速度峰值也越大.该研究表明:τ值表示驾驶员换道行为的紧急程度,该值与交通环境因素、驾驶员驾驶习惯和驾驶经验等因素有关.
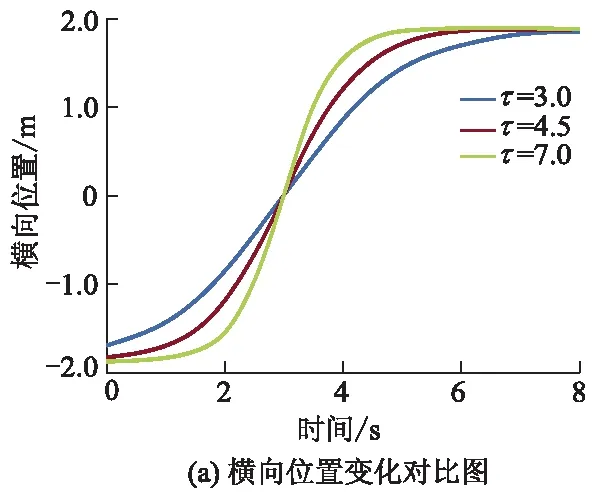
图7 不同参数下车辆换道轨迹特性对比图
4 模型的对比分析与验证
4.1 轨迹模型的对比分析
由相关研究[12]可知,样条曲线轨迹模型、五次多项式轨迹模型和正弦函数轨迹模型对车辆轨迹拟合精度较高,故文中采用这3种函数轨迹模型和双曲正切函数轨迹模型对前文中的数据进行拟合对比.随机选取3组样本轨迹数据(包含2组左换道和1组右换道)进行拟合,拟合结果表明:上述拟合函数均具有较高的拟合精度,拟合结果如图8所示,拟合函数如表3所示.
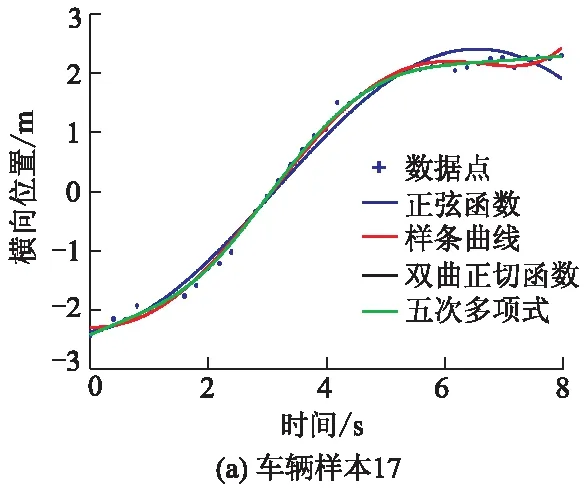
图8 不同换道轨迹模型拟合结果对比图

表3 不同换道轨迹模型拟合结果分析表
理想情况下,五次多项式拟合函数表达式中第4项和第5项的系数应该为0,因为在换道过程开始时,车辆横向速度和横向加速度都为0.然而,视频数据提取方式很难精确地确定换道行为准确的开始时间.在文中的观测数据中,初始横向加速度的值通常不为0.
拟合结果表明:对单一的车辆样本轨迹,4种函数拟合结果均呈现出较好的拟合精度,相对而言,双曲正切函数和五次多项式的拟合精度更高.但双曲正切函数拟合结果中,各个参数具有明确的物理意义,在以后的研究中通过建立行之有效的样本数据库,对比分析各参数分布规律性,这将有助于该换道轨迹模型的推广和应用.
4.2 CarSim仿真验证
为了进一步验证所提出的轨迹模型,使用CarSim软件来验证该轨迹模型生成轨迹的合理性[8].CarSim作为一种被广泛使用的行车动力学仿真软件,它不仅支持不同的车辆模型和控制策略,并且可以改变车辆的行驶轨迹.因此,文中使用CarSim软件生成来模拟车辆在双曲正切轨迹模型和传统五次多项式轨迹模型中的行驶特性,并通过软件得到车辆真实轨迹、方向盘转角和加速度等车辆动力学参数.
仿真环境设置为与数据采集地点相同的单向四车道高速公路,车道宽度3.75 m,长度250 m.根据《公路工程技术标准》中小客车外廓尺寸的规定,仿真车辆选定为B级车,设置车辆参数如图9所示.

图9 仿真车辆尺寸示意图(单位:m)

国内外大量研究均采用横向加速度来评价换道过程中的舒适性.文中提取并对比了仿真过程中车辆横向加速度参数值,如图10所示.

图10 横向加速度仿真对比图
在图10中,仿真车辆的横向加速度初值均不为0,在初始位置出现了较大的跳跃.这一方面是因为轨迹函数表达式为实测样本39中的轨迹数据的拟合结果,更主要的是因为仿真车辆在轨迹起点处的方向盘转角为0,需要在较短时间内调整至与轨迹相适应的角度,产生了较大的横向加速度.图10中,五次多项式轨迹模型产生的轨迹1横向加速度的峰值远大于轨迹2和3,达到了0.25g,相同换道情境下的轨迹2横向加速度峰值仅为0.10g;通过对比轨迹2和轨迹3,可以看出,轨迹3具有更小的横向加速度值.仿真结果表明:文中提出的双曲正切函数轨迹模型不仅可以产生与五次多项式轨迹模型相似的轨迹模型,并且可以通过判断换道情景的紧急程度,通过调整τ值来生成一个更舒适的更符合驾乘人员期望的换道轨迹模型.
5 结 论
根据无人机航拍得到的83组高速公路小客车换道轨迹数据,基于双曲正切函数提出了一种新的车辆换道轨迹模型.新模型中各个参数设置具有明确的物理含义,其中参数τ值表示驾驶员换道行为的紧急程度,τ的值越小,车辆换道轨迹的波动越小,换道轨迹越平缓;τ越大,车辆换道轨迹横向速度峰值、横向加速度峰值也越大.通过对比双曲正切函数轨迹模型与样条曲线、正弦函数、五次多项式轨迹模型的拟合优度发现,双曲正切函数和五次多项式轨迹模型拟合精度较高.
通过CarSim仿真软件进一步分析了不同轨迹下车辆横向加速度的变化情况,结果表明:文中提出的双曲正切函数轨迹模型不仅可以产生与五次多项式轨迹模型相似的轨迹模型,并且可以判断换道情景的紧急程度,通过调整τ值来生成一个更舒适的更符合驾乘人员期望的换道轨迹模型,模型的该特点可应用于与换道有关的道路几何指标研究和发展先进的驾驶员辅助系统(ADAS).
文中仅提取了一条高速公路出口路段附近小客车换道轨迹数据,且样本数量有限,在一定程度上限制了研究成果的广泛应用.除此之外,本研究仅仅关注于车辆换道轨迹,通过轨迹数据来得到车辆换道过程中的规律性.车辆换道行为是一个涉及到人的决策和驾驶环境的复杂过程,包括车道选择、换道类型(强制换道和自由换道)、可接受间隙等一系列问题,如何将本模型应用到整个换道过程中,来实现微观和宏观交通的一致性将是以后研究的重点内容.
猜你喜欢
华东师范大学学报(自然科学版)(2022年6期)2022-11-25
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
数学物理学报(2022年4期)2022-08-22
军事文摘(2021年22期)2022-01-18
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
新能源汽车报(2020年33期)2020-09-26
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
新能源汽车报(2018年18期)2018-05-14