毫米级纳米几何特征尺寸计量标准装置多自由度激光干涉计量系统
2020-08-07 02:55施玉书连笑怡高思田
计量学报 2020年7期
施玉书, 张 树, 连笑怡, 李 伟, 李 琪, 黄 鹭, 高思田
(中国计量科学研究院,北京 100029)
1 引 言
纳米技术是基础研究和高新技术发展中具有前瞻性、带动性的重点领域,已经成为国际科技竞争的战略制高点[1]。纳米结构的设计制造技术和观测分析技术是纳米技术实现工业化生产的关键技术[2],对于半导体、光学等先进器件而言,如果没有相应的计量检测分析技术,就无法进行高效的研发和生产。纳米几何结构计量是指针对MEMS器件和半导体集成电路产业中的各类纳米结构体的各种几何尺寸进行计量[3~5],包括间隔、宽度、高度和膜厚等几何尺寸,并将结果溯源至米定义SI单位。目前,纳米几何结构计量面临的最大挑战是被测物尺寸从几毫米到上百毫米,测量范围从几十微米到几十毫米,即纳米几何结构计量正从小范围向大范围迈进[1]。
纳米几何结构计量必须实现测量结果向米定义SI单位的直接溯源。目前SI单位米定义的复现是基于高复现性的碘稳频激光的波长实现,并通过碘稳频激光与其它激光的拍频比对实现米定义的量值溯源。激光干涉仪是长度计量中最为广泛使用的测量仪器,其位移测量结果可以直接溯源到米定义波长基准;然而,目前国内市场上商品型激光干涉仪基本被国外公司垄断,不仅价格昂贵,而且部分高分辨率的激光干涉仪的进口受到各种限制[6]。
2 毫米级纳米几何特征尺寸计量标准装置
毫米级纳米几何特征尺寸计量标准装置主要由位移系统、测头系统、计量系统、测量控制系统和环境测量控制系统5大部分组成。总体结构设计方案如图1所示。
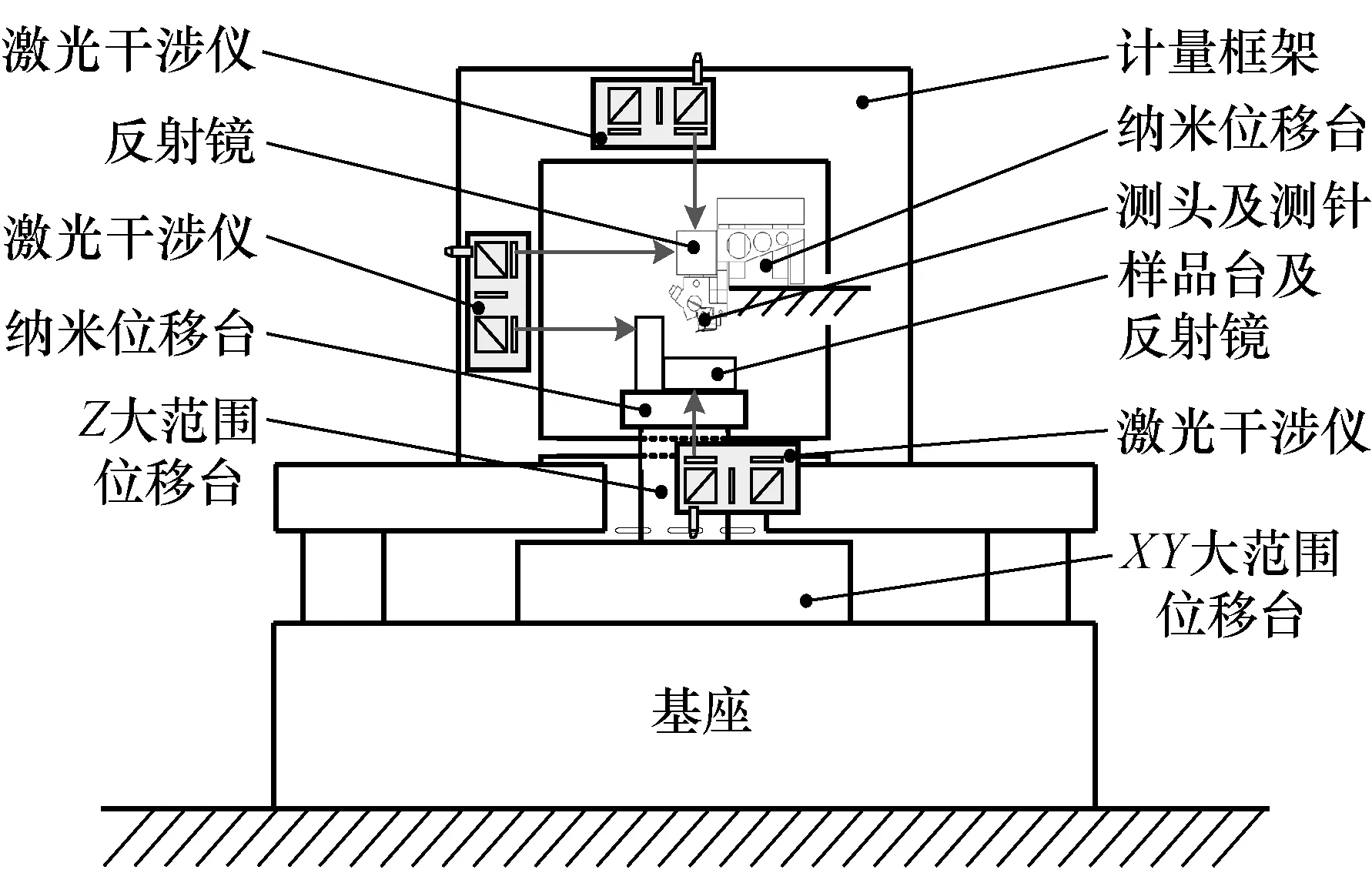
图1 装置整体结构设计方案Fig.1 Structure design scheme of the device
装置的主体结构采用大理石材质的龙门结构,具有热膨胀系数小、承载能力大以及抗环境扰动的特点,被广泛应用于计量仪器的研发[7];位移系统是用于实现装置不同测量范围、不同测量准确度的测量扫描,由三维毫米级位移系统与两级纳米位移系统构成,可以实现定位以及多尺寸测量扫描的功能[8,9];计量系统由多自由度激光干涉仪与计量框架构成,三维测长激光干涉仪可以实现纳米几何结构的空间准确计量,多自由度的测角干涉仪可以监测装置在扫描测量过程中的偏摆与扰动,从而对误差实施动态补偿修正,最终确保测量结果的准确可溯源[10];测头系统基于原子力测量原理,具有亚纳米量级的测量分辨力,可以在不损伤样品的情况下实现被测物三维表面结构的纳米级精细表征[11~13];测量控制系统实现测量装置的控制、数据采集处理以及人机交互,由计算机和DSP组成;环境补偿单元包括PTF测量和温度控制两部分,保证测量环境的稳定,修正激光波长误差,减小环境扰动对测量结果的影响。
研制的毫米级纳米几何特征尺寸计量标准装置中,需要在毫米级测量范围内,实现纳米级的测量准确度与亚纳米级分辨力,这种巨大的倍比关系对于激光干涉计量系统的研制提出了严峻的挑战。
3 多自由度激光干涉计量系统整体布局
根据装置总体方案,测头与被测样品均可实现三维移动,因此测头与被测样品均由计量系统进行测量。在线性位移的测量上,采用差动式激光干涉仪,在XY方向上共需要2个干涉仪测量测头与样品的相对运动;Z方向上干涉仪的测量光通过样品的被测点,符合阿贝原则,但由于样品的阻挡无法构成差动式激光干涉仪,故需要2个激光干涉仪分别测量测头与样品的Z向位移。4个测长激光干涉仪的分布如图2所示。

图2 测长激光干涉仪分布图Fig.2 Distribution of length measuring laser interferometer
从原理上讲,测头与样品台2个物体共需要6个角度传感器完成所有旋转自由度的测量。在本项目中,一共设计了8个测角干涉仪用于测头与样品台的转角测量。这种冗余的设计为装置的应用提供了更大的灵活性,参见图3。例如当样品沿X方向移动时,可以选用X轴上的Ry和Rz测角干涉仪而不使用Y轴上的Rz测角干涉仪,能进一步降低因反射镜平面度引起的角度测量误差。
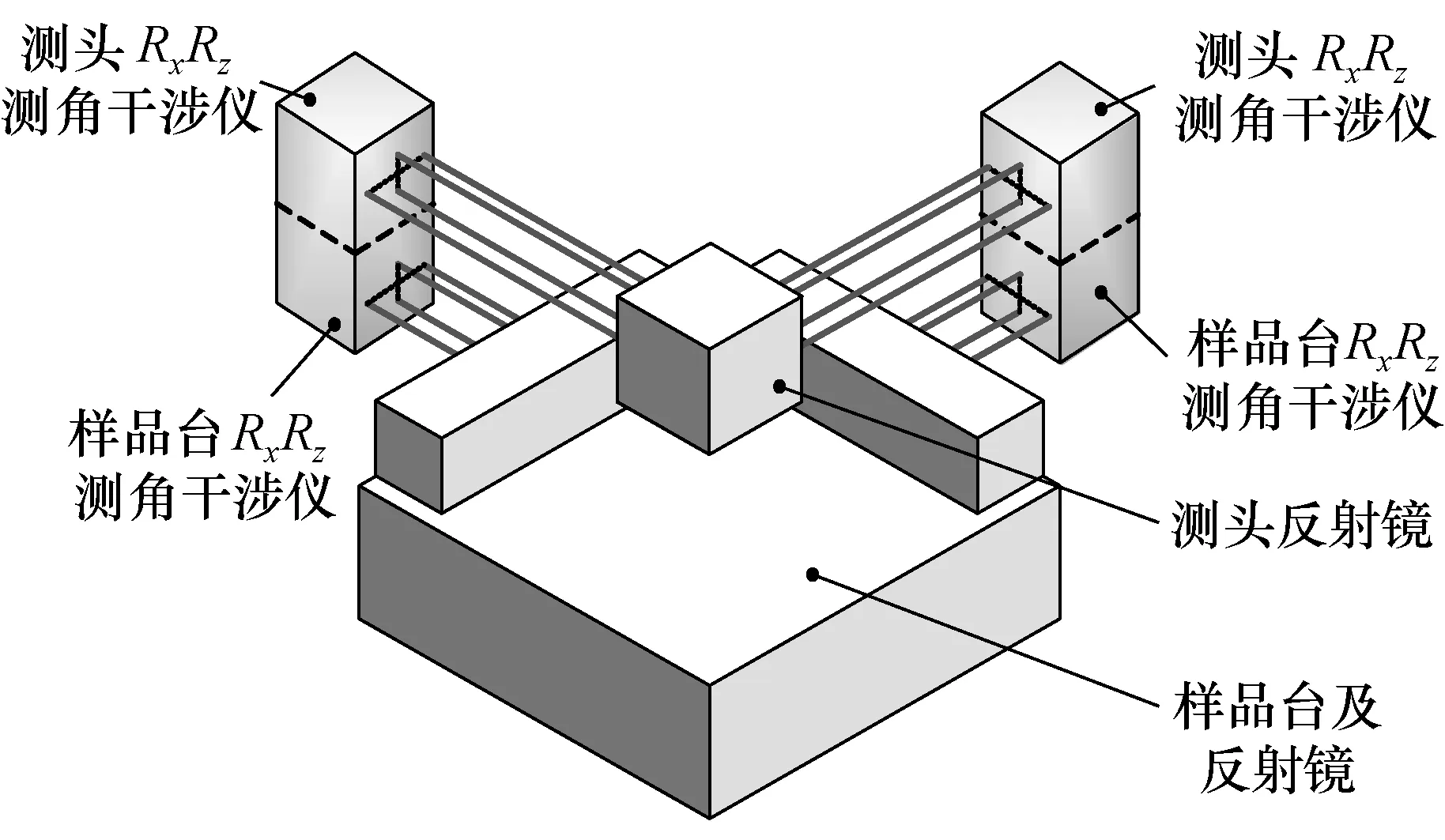
图3 测角激光干涉仪分布图Fig.3 Distribution of angle measuring laser interferometer
所有干涉仪安装在一个独立的计量框架上。计量框架与位移系统以及测头系统相互独立,避免了运动部分对测量系统的影响,提高了系统稳定性。如图4所示为搭建好的多自由度激光干涉计量系统的光学部分。

图4 多自由度激光干涉计量系统Fig.4 Multi-DOF laser interferometric system
4 光学8倍程偏振激光测长干涉系统
4.1 干涉光路设计
常用的激光波长是633 nm,为了要获得纳米级的测量分辨力,需要对干涉信号进行相位细分,使其输出读数分辨力为λ/2的n分之一,n为细分倍数。相位细分法主要是用于计算干涉条纹中不足1个周期的条纹所对应的位移量,其算法是基于干涉条纹光强的正弦形明暗变化,然而在实际中无法得到严格的正弦变化,这种拟合的算法必然会对干涉仪的测量结果引入非线性误差。
提高激光干涉仪分辨力的另一种方法是光学倍程法。光学倍程法的基本原理是通过特殊光学设计,使测量光束在测量反射镜和直角反射镜之间多次反射,然后再回到分光棱镜与参考光会合;光束往返N次,光学分辨力将提高2N倍。世界上高分辨力激光干涉仪产品都同时应用了光学倍程与相位细分技术。
图5是本文设计研制的光学8倍程偏振激光干涉仪的光路整体布局图。

图5 光学8倍程偏振激光测长干涉仪Fig.5 Optical 8-fold polarized length measuring laser interferometer
激光光源采用稳频氦氖激光器,通过保偏光纤直接导入干涉系统。激光从保偏光纤射出后经过光纤连接器FC以及准直镜CL后成为具有很好的方向性和平行性以及光斑小等特点的线偏振光;此偏振光经过1/4波片QWP变为圆偏振光入射到光学倍程干涉系统,入射的圆偏振光被偏振分光棱镜PBS分为2束偏振方向互相垂直的线偏振光(P光和S光),其中反射光通过1/4波片入射到参考镜RM,而透射光则通过1/4波片入射到移动镜MM;这2束光被镜面垂直反射后再次通过1/4波片,使得其偏振方向改变了90°:P光变为了S光,而S光变为了P光,即原来的透射光变为了反射光,而原来的反射光变成了投射光;2束光在偏振分光棱镜汇合,再经过直角棱镜的2次反射后又使2束光分别射到参考镜和移动镜,在参考镜和移动镜表面发生垂直反射,由于这一过程中2束光分别2次通过1/4波片,使得其“透”、“反”特性再次发生变化;同样2束光第2次汇合于偏振分光棱镜,再次被直角棱镜的2次反射后,分别射到参考镜和移动镜表面发生垂直反射,同样2次通过1/4波片,使得其“透”、“反”特性发生第3次变化;同理根据光路的几何特性,2束光的透射和反射特性的交替改变4次,使得它们分别在干涉系统与立方反射镜之间往返4次后才从偏振分光镜出射,入射到接收光路部分产生相移,分别由4个光电二极管接收,每个条纹周期对应的光学分辨力可由λ/2提高到λ/8,直接提高了4倍。
4.2 谐波分离修正法
干涉系统的两路输出信号在理想情况下是等幅、正交的简谐信号(正弦或者余弦信号),其分别在X,Y方向上的合成运动轨迹曲线为标准圆形轨迹;但由于光学原件并非理想元件,使得干涉系统的实际输出信号的直流电平、幅度,以及两路信号的正交性都会随机改变,从而造成了干涉仪的测量误差。通常情况下,干涉仪的非线性误差可达5~10 nm。因此必须对干涉仪非线性误差进行修正。
Heydemann方法[14]是将2路干涉信号用1个广义椭圆方程表示,因此也叫椭圆修正。该方法仅考虑了对干涉信号基波的修正,但在实际干涉信号中,由于光学元件的不理想导致产生谐波成分,尤其在光学倍程干涉仪中,谐波成分带来的误差影响不容忽视。因此,完善的非线性误差修正应该对信号的各个谐波成分进行。
本文提出的“谐波分离修正算法”,利用傅里叶级数对校准信号进行最小二乘拟合得到修正模型,消除干涉信号中引起非线性误差的各种谐波成分,使单频激光干涉仪的非线性误差修正达到最优化。谐波分离修正法的修正方程可用有限项傅里叶级数表示:

(1)
式中:a10,a20为直流分量;M为光学倍程数;a1(m+1),b1(m+1),a2(m+1),b2(m+1)分别为各谐波分量的系数;第3项为高于基波的谐波分量,c1n,d1n,c2n,d2n分别为各谐波分量的系数;N为高次谐波截取长度。
4.3 干涉仪信号处理电路
信号处理电路是激光干涉仪不可或缺的重要组成部分。干涉信号是光强的正弦信号,信号处理电路完成干涉信号采样、滤波、相位细分、修正等工作。本项目采用大规模CPLD器件用于干涉信号处理,系统架构更加合理,降低了DSP运行负担,提高运行速度,并简化系统,提高可靠性和稳定性。
图6是干涉仪信号处理电路的框图。激光干涉仪调理电路输出相位差90°的2路光强信号sinθ,cosθ。CPLD控制A/D转换器同步采集sinθ与cosθ,并加以滤波,去除数字化采样中的粗大误差。CPLD完成sinθ对cosθ的除法,求得正切值,消除光强变化的影响;反正切值(相位值)已提前写入处理电路的存储器中,CPLD只需根据正切值进行寻址即可得到对应的相位值。通过DSP的16位外部访问扩展总线,DSP可实时访问CPLD,读取当前干涉仪的相位值。若要进行相位修正,如前所述的“谐波分离修正法”,可随时通过DSP和CPLD将修正结果写入存储器,后续CPLD再寻址得到的相位值就是修正后的结果了。

图6 干涉仪信号处理电路框图Fig.6 Interference signal processing block diagram
4.4 测长干涉仪性能测试
同时使用本文研制的测长激光干涉仪与电容传感器,测量了1个线性纳米位移台的9 nm步进的连续位移,得到如图7所示的测量结果。图7中以激光干涉仪和电容传感器测量的位移值为纵坐标,以时间轴为横坐标。

图7 激光干涉仪台阶形位移曲线Fig.7 Step displacement curve of laser interferometer
由实验结果以及前述干涉仪的设计研制可知,该激光测长干涉仪具有以下特点:
(1)条纹周期达到了λ/8,使非线性误差得到修正;
(2)光源由保偏光纤直接导入,既保持了入射光的线偏振特性,又解决了激光器发热和散热的问题;
(3)测量光和参考光共光路设计,无效光程小,干涉信号稳定,条纹对比度好;
(4)测长激光干涉仪的高分辨力和灵敏度以及较低的噪音水平。
5 测角激光干涉仪
在测量过程中需对测头与样品台在运动过程中的转角进行测量。使用干涉法进行角度测量,基本原理就是把被测物的转动转化成干涉仪测量光与参考光的光程差。通常做法是将干涉仪测量光与参考光分别照射在待测转角的转轴两侧,被测物的转动就会导致2个光束的光程差。装置的测角干涉仪采用共光路形式的Nomarski干涉仪来探测反射镜角度的变化,干涉条纹周期为λ/2,相位细分与修正电路采用与测长干涉仪相同的电路。
测角干涉仪的关键技术在于提出了一种基于Koester棱镜的对称光路设计,见图8所示,该结构设计紧凑,使得4路测角干涉仪能够集成在1个基板上。

图8 基于Koester棱镜的激光偏振测角干涉仪Fig.8 Laser polarization angle measuring interferometer based on Koester prism
测角干涉仪的原理与测长干涉仪相同,测量信号反映的是测量光与参考光之间的光程差。干涉仪的测量光与参考光投射在同一个反射镜表面,所得测量信号除以2束激光的间距,即为反射镜的转角。
6 结 论
本文对研制的毫米级纳米几何特征尺寸计量标准装置多自由度激光干涉计量系统进行了介绍,实现在毫米级的测量范围内,具有纳米级的测量精度并将测量结果直接溯源至米定义的SI国际单位。研制的8倍程激光测长干涉仪将条纹周期提高到λ/8,提高了测量分辨力,避免了平面反射镜偏摆的影响,且具有无效光程(死程)小,干涉信号稳定,条纹对比度好的优点,大大增强了干涉仪抗干扰能力、减小了测量误差;测角干涉仪为基于Koester棱镜研制的共光路形式的Nomarski干涉仪,结构紧凑,可将4个测角干涉仪集成到一个基板上,并可以有效减少空气和温度漂移引起的扰动。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
制导与引信(2017年3期)2017-11-02