基于单肌肉表面肌电-加速度融合的步态识别
2020-08-05 01:42吴平平徐剑华杜明家
合肥工业大学学报(自然科学版) 2020年7期
吴平平, 徐剑华, 杜明家, 王 勇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
研制高性能智能假肢可以帮助截肢者重新融入社会,提高截肢者的生活质量。假肢在平地行走、上下楼梯和上下坡等多种运动模式下的协调控制能力是评估智能假肢性能的重要指标之一[1]。只有正确识别出截肢者下肢运动模式,才能采取有效的控制策略,因此,下肢运动模式识别方法的研究成为智能假肢的关键技术之一。
基于传感器的下肢运动模式识别方法因其灵敏度高、不受环境因素制约等优点而备受研究者青睐。在下肢步态识别研究中,为了获取充足的人体运动信息,需要搭建多传感器信息采集系统。多通道表面肌电信号被广泛应用于人体运动模式识别。文献[2]采集了5通道表面肌电信号进行步态识别,准确率为96.67%;针对下肢运动特点,文献[3]、文献[4]分别使用了6通道、9通道表面肌电信号进行步态识别;文献[5]将4个柔性压电传感器放置于膝盖和臀部处,步态识别率在93%以上;文献[6]搭建了下肢多源运动信息系统以获取下肢表面肌电信号、腿部角度信号和足底压力信号,识别了平地行走、上楼梯和下楼梯,识别准确率在95%以上;文献[7]通过采集4通道表面肌电信号和腰部加速度信号识别了7个日常动作,平均识别率达到98.62%;文献[8]将足底压力信号和9通道表面肌电信号信息融合,对步态支撑期和摆动期进行分类,准确率在95%以上,并正确识别了步态相位的转换。上述方法均需通过多个传感器采集信息,由此产生了系统复杂、成本高、穿戴舒适性差等一系列问题,而且传感器过多易造成信息冗余、分类模型建立困难。
目前,下肢运动模式识别常用的传感器信息主要有表面肌电信号、足底压力信号、关节角度信号和加速度信号。采集加速度信号的传感器具有价格便宜、体积小、功耗低、运动信息丰富等优点;表面肌电信号的采集只需将传感器固定在相应肌肉上,信号采集方便、灵活;加速度信号可以反映大尺度的人体运动信息,而表面肌电信号可以反映精细的肌肉活动信息[9],两者融合更为合理。因此,为了减少穿戴的传感器数量、克服多传感信息采集系统的不足,本文只获取单肌肉表面肌电信号和加速度信号来识别下肢不同步态模式。
1 系统设计
进行步态试验时,为了摆脱线缆束缚和空间制约,搭建了无线表面肌电和加速度信息采集系统,系统包括固定在肌肉上的信号发射端和与PC连接的信号接收端,系统结构如图1所示。

图1 系统结构
由信号采集模块和无线模块组成的信号发射端完成表面肌电和加速度信号的实时采集与无线发送。信号采集模块通过肌电采集电路和加速度传感器采集表面肌电和加速度信号,并输入到单片机中,经A/D转换和IIC协议读取后打包发送到无线模块;无线模块选用蓝牙模块将接收到的数据放入发送缓冲区准备发送。肌电采集电路使用差分方式采集信号,由前级放大电路、低通滤波电路、二级放大电路、高通滤波电路组成,放大倍数为500倍,其中前级放大100倍,二级放大5倍,截止频率为20~500 Hz;加速度模块选择MPU6050模块将其固定在信号发射端。信号接收端通过与发射端配对的蓝牙接收数据,并传输到PC端实时显示和储存。系统实物图如图2所示。

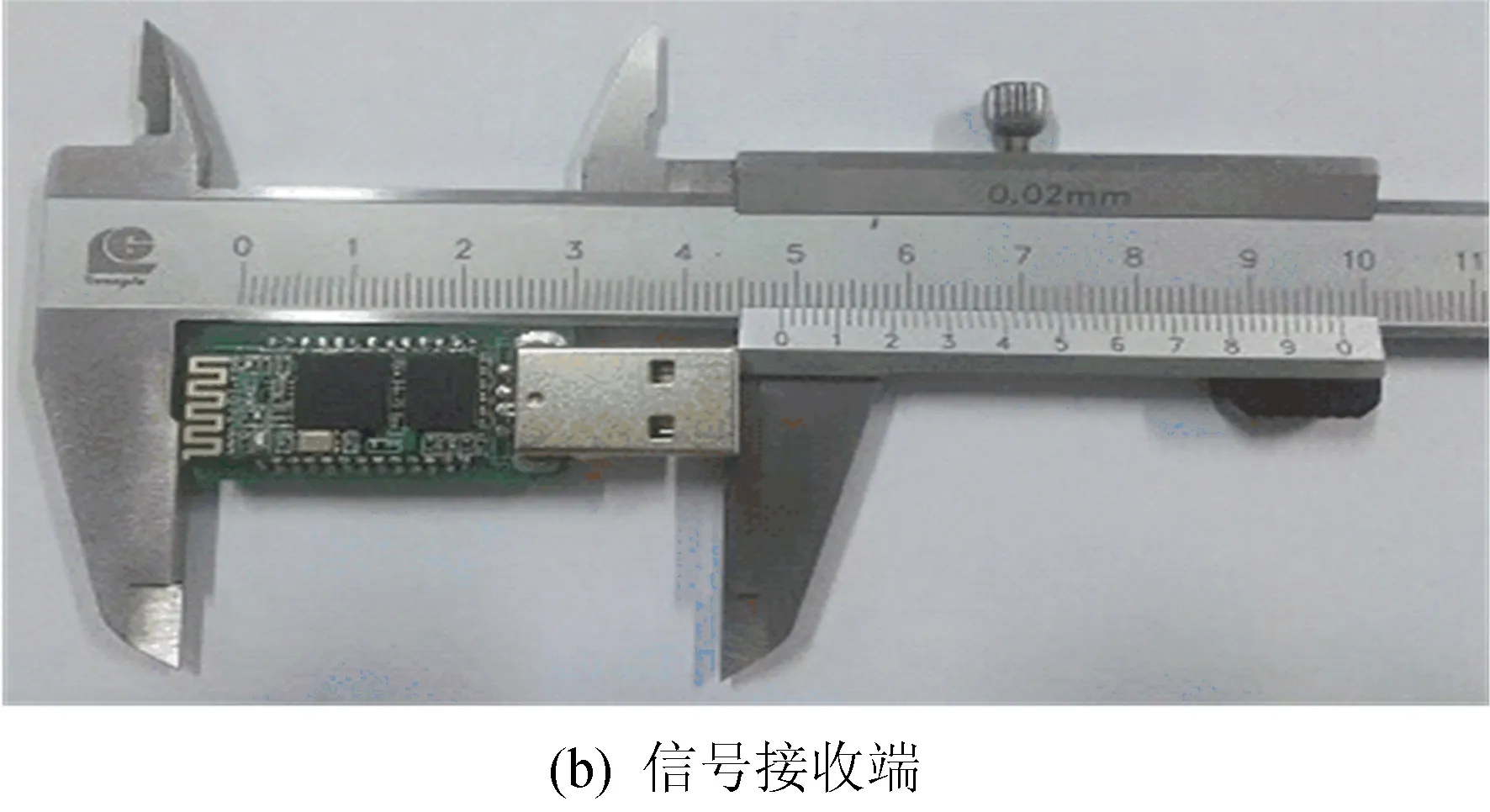
图2 系统实物图
2 信号预处理及特征提取
2.1 肌肉选择
下肢运动是多肌肉相互配合的结果,各个肌肉在下肢运动时的作用不完全相同,本文为了减少传感器数量,只采集单肌肉表面肌电和加速度信号,因此选择合适的肌肉至关重要。根据文献[10-11],股直肌(vastus rectus,VR)、半腱肌(semitend inosus,SE)、腓肠肌(gastrocnemius,GA)、胫骨前肌(tibialis anterior,TA)和臀大肌(gluteus maximus,GM)等肌肉在下肢运动时都具有明显的收缩,腿部肌肉位置如图3所示。股直肌位于大腿前方,是人体最大、最有力的肌肉之一,具有伸小腿和屈大腿的运动功能,在步态变换中表现出敏感的特性,特别是在平地行走、上楼、下楼、上坡、下坡5种步态模式下的兴奋程度要远大于其他肌肉[12],在下肢运动过程中起到非常重要的作用。综合不同肌肉在人体下肢运动时的功能以及位置、长度、面积等因素,最终选定股直肌作为试验相关肌肉,采集其表面肌电和加速度信号。
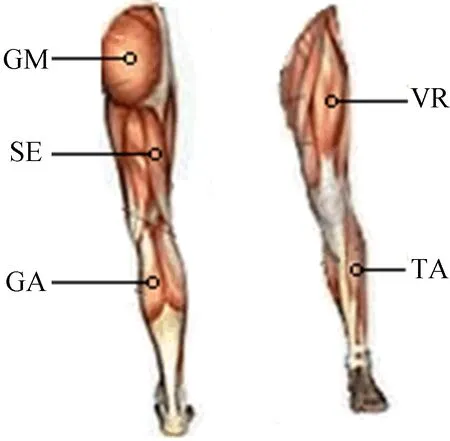
图3 腿部肌肉位置
2.2 预处理
因为电阻阻值和电容容值的限制,实际设计的高通滤波电路和低通滤波电路的截止频率会有一定误差,所以使用数字滤波器对原始肌电信号再次滤波。设计二阶巴特沃斯带通滤波器对原始信号进行滤波,高通截止频率为20 Hz,低通截止频率为500 Hz。平地行走时表面肌电信号滤波前、后的波形如图4所示。由图4可知,滤波后,去除了直流分量,噪声和运动伪迹也明显减少。

图4 表面肌电信号预处理前、后波形的对比
人体在运动过程中,由于身体晃动、呼吸状况等因素会产生非正常高频噪声混杂在加速度信号中,不利于后续的步态划分和特征提取。小波去噪是将信号映射到小波域,根据有效信号的小波系数大于噪声的小波系数,经过阈值处理后对小波系数重构,得到去噪后的信号[13],利用此原理小波去噪可以有效地消除加速度信号中的局部突变,经过多次试验,选取dB5小波作为基函数,分解层次为4。
2.3 特征提取
人体步态运动是周期性过程,一个步态周期是步态识别的最小单元。因为单一的股直肌表面肌电信号无法反映所有的下肢运动信息,而加速度信号随着下肢运动实时变化,所以可以利用加速度信号进行步态周期划分。一个步态周期中,垂直地面方向的加速度在后脚跟触地到完全着地时会因为冲击产生一系列极值点,这些极值点包含了丰富的动作转换信息[14]。通过对比分析采集的试验数据可知,若信号中的极大值与左右相邻的极小值满足以下关系,则将此极大值点作为周期分割点,依次进行分割,相邻周期分割点间的所有采样点即为一个步态周期信号。满足的关系为:
amax-amin≥ε
(1)
(amax-amin)/l≥σ
(2)
其中,amax为极大值;amin为极小值;l为极值点之间的数据长度;σ、ε为阈值(通过多次试验数据对比总结所得)。根据垂直地面方向的加速度信号步态划分结果,对其他信号进行相同的切分处理,上楼步态模式下周期划分的结果如图5所示。

图5 上楼步态模式下周期划分结果
获取一个步态周期信号后,为了识别下肢不同步态模式,需要提取有效的特征值。
在对加速度信号特征提取时,左、右方向的加速度信号是由人体运动时随机摆动产生的,经过多次特征值提取,目前还无法提取出有效的步态特征信息,因此本文考虑提取垂直地面方向和人体前进方向加速度信号的特征值。人体在完成不同步态动作时,步频、步幅、步行时相等都存在差异,因此选择平均值、均方根、偏度以及相关系数作为时域特征[15],平均能量值EA作为频域特征,其表达式为:
(3)
其中,n为一个步态周期的数据长度;Ak为离散傅里叶变换的系数。
股直肌在不同步态模式下的兴奋持续时间和兴奋程度各不相同,结合时域特征值的物理意义,选择均方根、标准差和四分位间距作为时域特征值[15]。由于表面肌电信号属于非平稳信号,传统的傅里叶变换并不适合于这类信号分析,而小波变换作为时频分析方法,可以同时提供时域和频域2个方面的信息,是分析表面肌电信号的一种有效手段[16]。因此本文通过Mallat快速算法将肌电信号分解到时、频域,选取dB2小波作为小波基,进行4层分解,提取第3层和第4层的细节系数分量。小波能量EWj的计算公式为:
(4)
其中,j为表示伸缩尺度的变量;k为时间的变量;dj,k为细节系数。
2.4 特征融合
特征融合的目的是尽可能保留原始特征向量中的有用信息,去除冗余信息。在提取表面肌电和加速度信号特征值时发现,其在特征空间中的分布呈现非线性的本质,传统的线性融合方法显然不适用。核主成分分析(kernel principal component analysis,KPCA)是主成分分析(principal component analysis,PCA)的核版本,它将特征向量通过事先选择的非线性映射函数映射到高维特征空间中,再使用PCA方法计算主元成分,既保持了PCA的优点,又解决了非线性降维问题。由于不同信号提取的特征值尺度差异很大,在融合之前需要对特征值进行归一化处理,即
xnew=(x-μ)/σ
(5)
其中,xnew为归一化后的特征值;μ、σ为数据的均值和方差。使用(5)式将特征向量归一化成均值为0、方差为1的数据集。根据文献[17]介绍的KPCA方法对特征向量进行融合处理。
3 试验结果及分析
试验由5名健康受试者完成,其中4名男生、1名女生,年龄(24±2)岁,身高(170±13) cm,体质量(55±10) kg,股直肌肌肉功能正常。使用上海励图医疗器材公司生产的Ag-AgCl心电电极片将信号发射端粘贴在股直肌上(加速度传感器x轴垂直于地面),并利用绑带进行二次固定,以防止在人体运动时产生剧烈抖动。5种步态信号采集试验如图6所示。
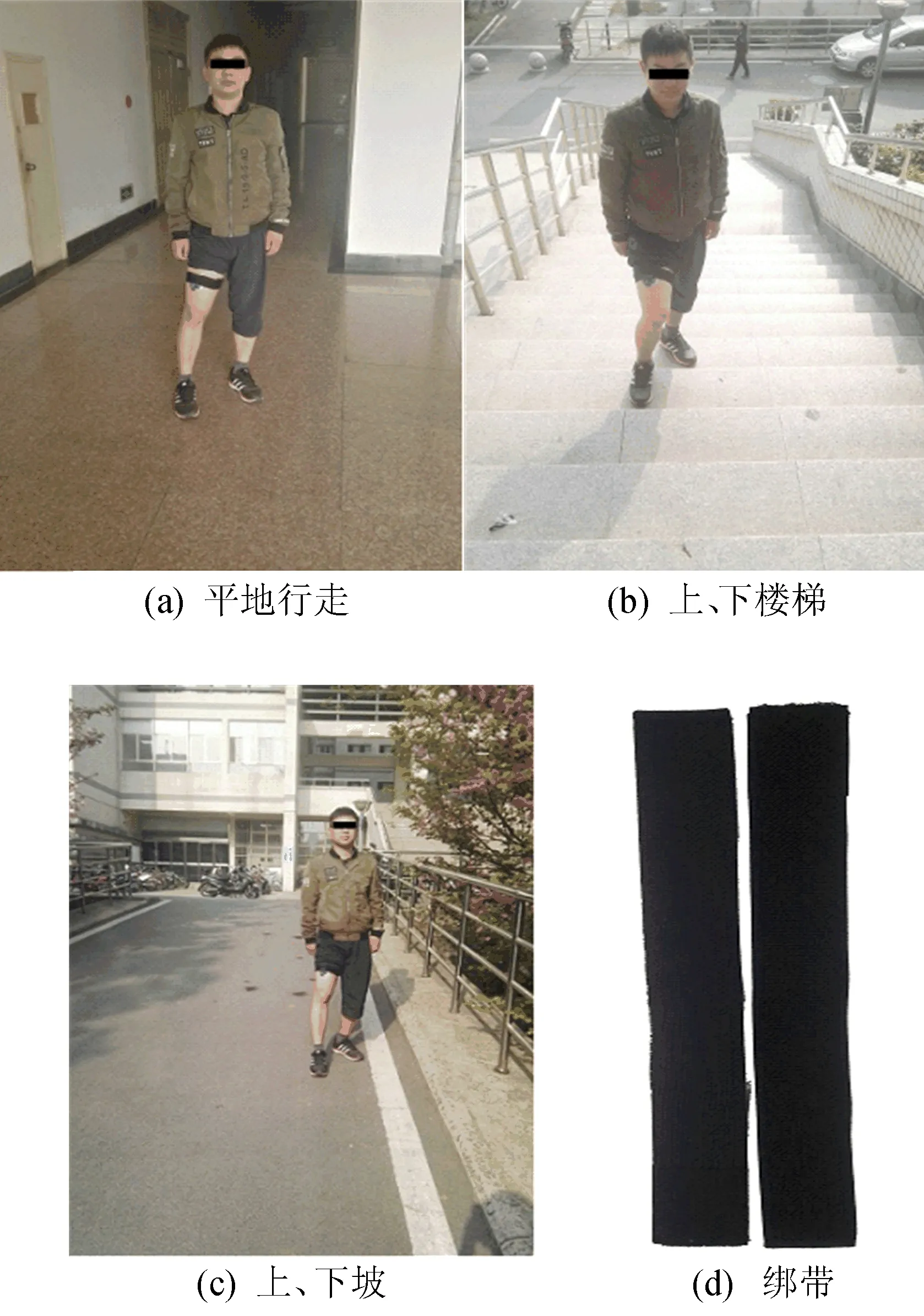
图6 5种步态信号采集试验
每名试验者需要在平地、上楼梯(台阶高为150 mm)、下楼梯、上坡(坡度约为15°)和下坡5种步态模式下进行试验,每进行5次数据采集后休息5 min以消除肌肉疲劳,每种步态模式采集20组数据。试验共得到500组数据,其中350组作为训练数据,150组作为测试数据。将每组数据预处理后进行步态划分,对划分出的第1个步态周期信号提取特征值并进行信息融合。分类算法的性能直接影响整个系统的识别准确率,反向传播(back propagation,BP)神经网络和支持向量机(support vector machine,SVM)是公认性能较好的分类器,被广泛应用在模式识别领域,因此,本文分别使用BP神经网络和SVM对数据建模,根据其识别率和识别时间评价模型的性能,找出最优分类模型。
核函数的选择是影响KPCA性能的重要因素,常用的核函数有线性核函数、多项式核函数、高斯径向基核函数和Sigmoid核函数。实际选取核函数时通常采用的方法有:① 利用先验知识预先选定核函数;② 试用不同的核函数,选择误差最小的核函数。本文使用第2种方法确定最优核函数,选择累计贡献率大于90%的主成分代替原始特征向量,试验结果见表1所列。

表1 不同核函数方法结果的比较
由表1可知,高斯径向基核函数识别率最高,均方误差也最小。这是由于通过改变宽度参数可以调整核函数的作用范围,降低超过这个范围的数据所带来的影响,对数据中的噪声具有很好的抑制能力,有利于减小步态识别中不同个体步态的差异性。
因此本文选择高斯径向基函数作为核函数,其表达式为:
(6)
其中,x、y为样本数据;σ为宽度参数。
BP神经网络可以有多个隐含层,但是对于大部分问题单个隐含层即可满足需求,而隐含层节点数却对模型性能影响很大,因此本文尝试不同的隐含层节点数和高斯径向基核函数宽度参数,寻找最优结构。
不同的隐含层节点数和宽度参数的选择结果如图7所示。从图7可以看出,当隐含层节点数为5、宽度参数为7时识别率最高,为91.33%,此时特征向量经KPCA处理后的累计贡献率如图8所示。

图8 累积贡献率
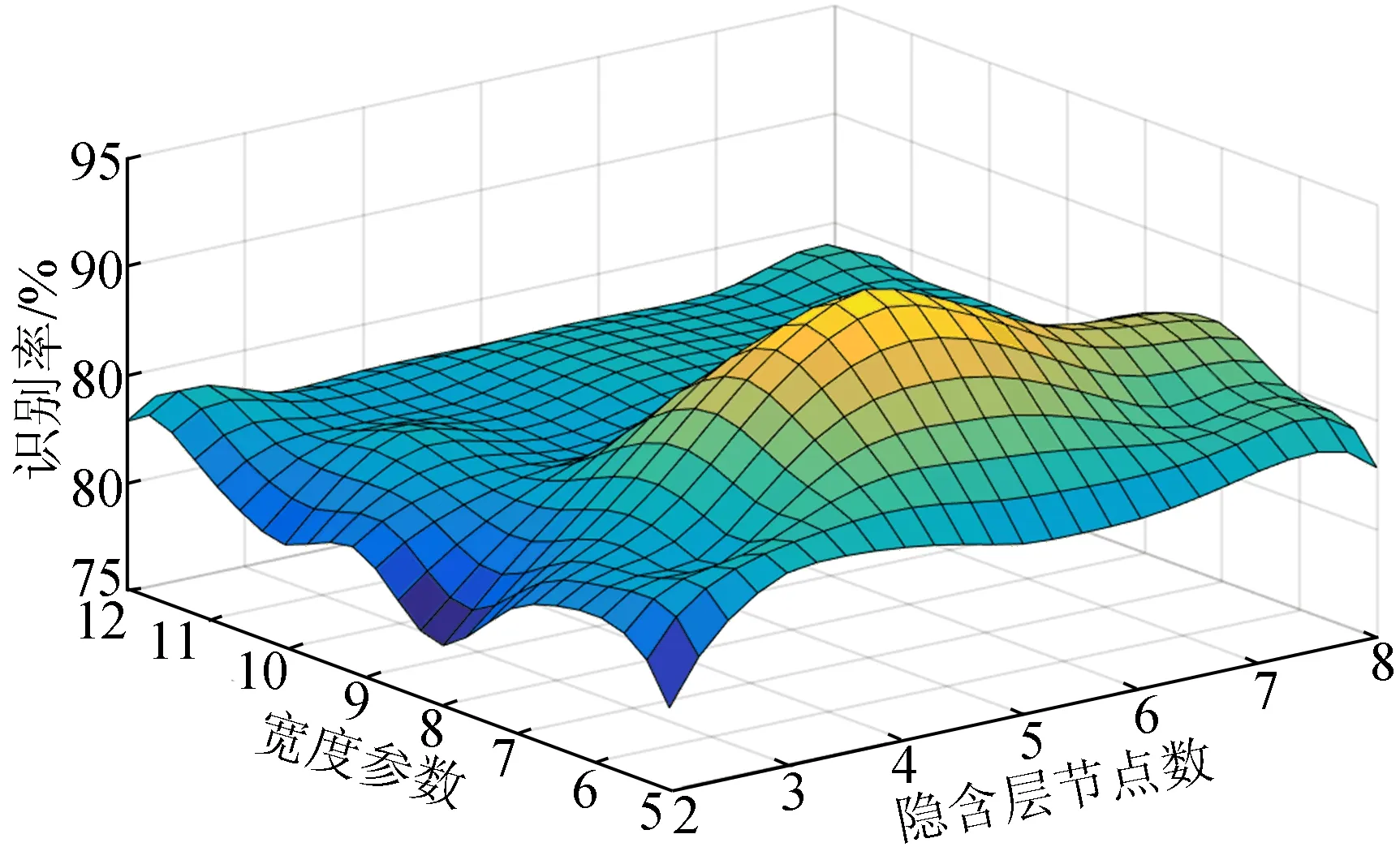
图7 不同隐含层节点数和宽度参数选择结果
对于线性不可分问题,SVM通过非线性映射将低维输入空间转化到高维空间使其线性可分,通过计算核函数代替高维空间的内积计算以减小计算量。因为高斯径向基函数在步态识别中的优越性能,所以依然选择其作为SVM的核函数,利用LibSVM工具包[18]通过网格搜索方法调整惩罚因子c和径向基核函数宽度参数σ,当c=3、σ=4时,识别率可达94.00%。
通过以上研究,得到了2种分类算法的识别率和分类时间,见表2所列。由表2可知,SVM不仅分类时间远小于BP神经网络,而且识别率也更高。这是由于人体步态尽管在总体上呈现相似性,但个体间却存在着明显差异,表现在步幅和步频等方面,SVM的理论基础决定了它最终求得的是全局最优值,而BP神经网络容易陷入局部最优解,对个体差异性比较敏感。因此,相对于BP神经网络,SVM在步态识别中的性能更好。

表2 BP神经网络与SVM的识别结果比较
为了验证表面肌电-加速度融合识别下肢步态模式的有效性,利用上述试验数据对单一加速度信号、单一表面肌电信号和未融合的表面肌电-加速度信号特征值分别建立模型,识别率见表3所列。由表3可知,表面肌电-加速度融合方法的识别率大于其他方法。由于在上楼梯和下楼梯、上坡和下坡时腿部动作相似性很高,依靠单一加速度信号会将下楼或下坡误分类为对应的相似动作,导致上楼和上坡识别率很高,而下楼和下坡识别率很低,从加速度信号很难区分其差异性;但是上楼梯和上坡股直肌等肌肉的兴奋程度要高于下楼梯和下坡,从表面肌电信号可以明显区分开。根据下肢步态模式中表面肌电和加速度信息互补关系,特征值未融合时识别率高于单一信息源,再经过特征融合、减少分类器输入参数、去除冗余信息,可以进一步提高不同步态模式的识别率。
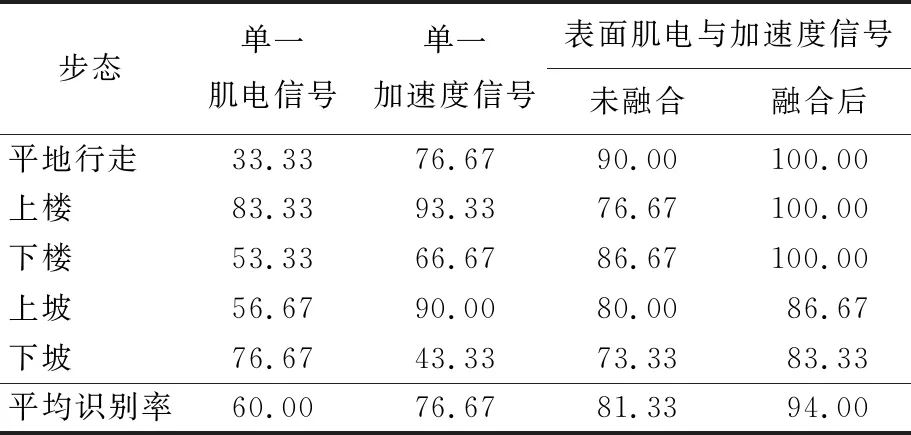
表3 不同信息源识别率比较 %
4 结 论
本文针对多传感器步态识别方法的不足,提出了一种简单的、低成本的基于单肌肉表面肌电-加速度融合的步态识别方法。搭建了无线表面肌电和加速度信息采集系统,选择股直肌作为试验相关肌肉,获取单肌肉表面肌电和加速度信号,再对采集的信号预处理后提取特征值,采用KPCA方法对这些特征值信息融合;利用SVM、BP神经网络分别建模,步态识别率分别为94.00%、91.33%。不同信息源识别的结果验证了本文信息融合方法的有效性。与多传感器识别方法相比,本文方法虽然减少了传感器数量,但是根据下肢步态模式中表面肌电和加速度信息互补关系依然取得了很高的识别率。
本文只对大腿的股直肌进行了探究,在以后的工作中还需要解决以下问题:① 对小腿肌肉进行分析,比较两者的差异;② 改进算法,进一步提高识别率,并增加截肢患者为受试对象进行分析。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
成都信息工程大学学报(2021年4期)2021-11-22
中国听力语言康复科学杂志(2019年3期)2019-06-24
科技传播(2019年24期)2019-06-15
中国美容医学(2018年12期)2018-02-27
北京航空航天大学学报(2017年9期)2017-12-18
特别健康·下半月(2017年6期)2017-07-31
中国高新技术企业(2017年5期)2017-05-05
物联网技术(2016年11期)2017-01-12