
液压挖掘机动臂疲劳试验载荷谱编制方法
2020-08-03 06:12
矿山机械 2020年7期
陕西工业职业技术学院 陕西咸阳 712000
液压挖掘机的工作环境十分恶劣,其动臂因承受连续的随机载荷而发生损坏的现象经常出现,进而影响挖掘机的使用寿命。为了提高挖掘机的可靠性,应在产品的设计阶段就进行定制化疲劳寿命的设计,该设计的前提是得到与动臂实际作业工况相符的载荷谱。该载荷谱作为疲劳试验台架的输入参数,从而对挖掘机动臂的性能做出准确而快速的评估。综合国内外的研究成果,目前对于挖掘机工作装置载荷谱的研究大多数基于仿真软件,但是仿真结果不一定可信,需要进行试验验证。此外,大多数是将应力谱作为室内疲劳试验加载的依据,它虽然能反映零件所承受载荷的变化情况,但在加载过程中,需要将危险点处的应力当量为力进行加载,导致随着机型的改变,最终加载力有所不同。作者基于销轴传感器实测出铲斗与斗杆铰接处的载荷时间历程,将当量后的动臂垂向载荷作为载荷谱编制过程中的输入信号,经过压缩编辑、雨流计数和合成外推等步骤,最终研究出一套不仅可代表实测载荷数据,而且可以摆脱挖掘机机型限制的动臂疲劳试验载荷谱,为后期进行疲劳可靠性试验提供可靠的数据。
1 动臂载荷测试与信号预处理
1.1 载荷测试
选择典型的液压挖掘机机型,并保证所选机器状态良好。通过市场调研统计出挖掘机在各种作业介质下工作时间的比例,采用样本估计法最终确定出松散土、原生土、土石混合以及石块 4 种典型作业工况。参照日本标准《JCMAS 土方机械液压机械燃油消耗量试验方法》,可将挖掘机的整个作业过程分为 6 段式动作模式,但对于熟练的操作人员而言,提升和回转、返回和下放经常一起执行。为了使作业分段的适用性更加广泛,最终将挖掘机的动作模式分为挖掘、提升回转、卸载、空斗返回 4 个阶段,并据此模式进行挖掘作业。通过销轴传感器测得斗杆与铲斗铰接处的载荷,采用连杆传感器直接测得连杆力[1],利用位移传感器测出动臂液压缸、斗杆液压缸以及铲斗液压缸的位移。动臂试测载荷信号频谱分析如图 1 所示,得知其频率大部分集中在 4 Hz 以内,最高不超过 5 Hz。采样频率设置得越高,原始信号保留得越完整,但是也会因此占用更多的计算机内存;采样频率设置得过低,则会造成漏频现象,使得采集到的载荷信号失真。在工程实际中,一般取信号最高频率的 3~5倍作为采样频率[2]。综合考虑,本次试验最终将采样频率定为 20 Hz。采用保守谱密度精度估计法,最终确定出的样本长度为 200 斗左右。

图1 动臂试测载荷信号频谱分析Fig.1 Spectrum analysis diagram of load signal from boom pre-test
1.2 信号预处理
液压挖掘机在作业过程中,通过传感器测得的载荷信号会受到各种因素的干扰。外界温度的影响使得各测点的载荷信号出现零点漂移,利用最小二乘法对其进行处理。一些较大的外部干扰或人为错误会引起载荷信号突变,产生奇异值。分析奇异值产生的原因,综合运用幅值门限法、梯度门限法和标准方差法对奇异值进行剔除。通过以上处理,可将反映液压挖掘机动臂载荷变化规律的真实信号提取出来,从而为后续科学编制载荷谱奠定基础。
1.3 测试数据检验
参照飞机载荷谱“飞-续-飞”的编谱方式,本次试验同样以作业段为基本单位,进行载荷信号的平稳性检验。依据液压缸位移、液压缸推力及回转角度3 个参数的变化情况,对液压挖掘机的工作过程进行分段,如表 1 所列。

表1 挖掘机工作过程阶段划分Tab.1 Stage division of excavator operation process
利用轮次法和假设检验法[3]对分段后的载荷数据进行平稳性和各态历经性检验,结果显示各作业段通过检验,表明可以用一定斗数的样本载荷数据替代母体。
2 动臂当量载荷的获取
根据液压挖掘机工作装置的结构特点,建立相应的计算坐标系统,如图 2 所示,分析全局坐标系与各局部坐标系之间的转换关系。
绘出液压挖掘机工作装置简图,如图 3 所示。根据已知的结构尺寸及角度,可计算出坐标转换角度以及在后续铰点载荷求解过程中所需的结构未知量。已知旋转角度b11、b22、b33,可求解出坐标系之间的转换矩阵,根据转换矩阵可将铰点载荷在任意坐标系下进行转换。

图2 挖掘机工作装置的计算坐标系统Fig.2 Calculation coordinate system of excavator manipulator

图3 挖掘机工作装置简图Fig.3 Sketch of excavator manipulator
当液压挖掘机不进行回转运动时,工作装置各构件仅在平面内做各种复合运动,动臂、斗杆、铲斗的运动均可看作是随着质心移动和绕着质心转动的复合动作。本次试验中,采用销轴传感器测出斗杆与铲斗铰接点A处的受力,包括正载、侧载和偏载,利用连杆传感器测出连杆与铲斗铰接点B处的受力[1],通过位移传感器测出动臂液压缸、斗杆液压缸以及铲斗液压缸的伸缩量,然后将以上实测数值作为初始值,基于达朗贝尔原理,按铲斗-斗杆-动臂的顺序依次分析各构件的受力情况,最终以动臂为隔离体,可知其受到以下力的作用:动臂液压缸的推力、车架对动臂的力、斗杆液压缸的推力、斗杆对动臂的力、重力以及惯性力,如图 4 所示。

图4 动臂受力分析Fig.4 Force analysis of boom
据此,在第一局部坐标系下可建立动臂的力平衡方程及力矩平衡方程:

对J点取矩,根据合力矩为 0,可得

式中:α、x1~x5、y1~y5均为挖掘机的结构角度及尺寸,可根据工作装置简图求解得到;FO为铰接点O处的载荷;G为重力;jg为惯性力;FH为斗杆液压缸力,FG为斗杆对动臂的力,在以斗杆为隔离体进行分析时均已经求解得到;Fk为动臂液压缸力。
联立式 (1)~(3),即可求出Fk及铰点O处的载荷FOx1、FOy1。此外,O点处还存在 2 个力矩,可由A点处的力矩推导得出。
通过最大弯矩截面应力等效方法将动臂上所受的所有力及力矩等效为动臂与斗杆铰接处G点的一个垂向力,具体等效过程见文献 [4]。将等效后的载荷时间历程作为后续载荷谱编制过程中的输入信号,以石块介质为例,载荷信号如图 5 所示。

图5 载荷信号Fig.5 Load signal
由图 5 可知,载荷信号随着挖掘机工作过程呈明显的周期性变化,且与实际作业过程中的载荷变化一致,即大载荷出现在挖掘阶段,表明所测载荷时间历程能够反映挖掘机动臂作业过程中真实的受力特性。
3 载荷谱的编制
3.1 压缩信号
为了保障信号真实有效,在数据采集过程中通常选取较高的采样频率。但是,这样会使信号中包含大量无用的数据,给后期数据处理带来极大的麻烦。采用峰谷抽取法以及“四点法”分别去除对疲劳损伤不做贡献的非拐点信号及小载荷信号[5],样本数据量得到有效压缩。
3.2 雨流计数
采用雨流计数法[6]对压缩后的载荷时间历程进行计数统计,得到幅值、均值、频次三维柱状图,以石块介质为例,雨流计数结果如图 6 所示。
3.3 载荷谱的变换及载荷分布规律
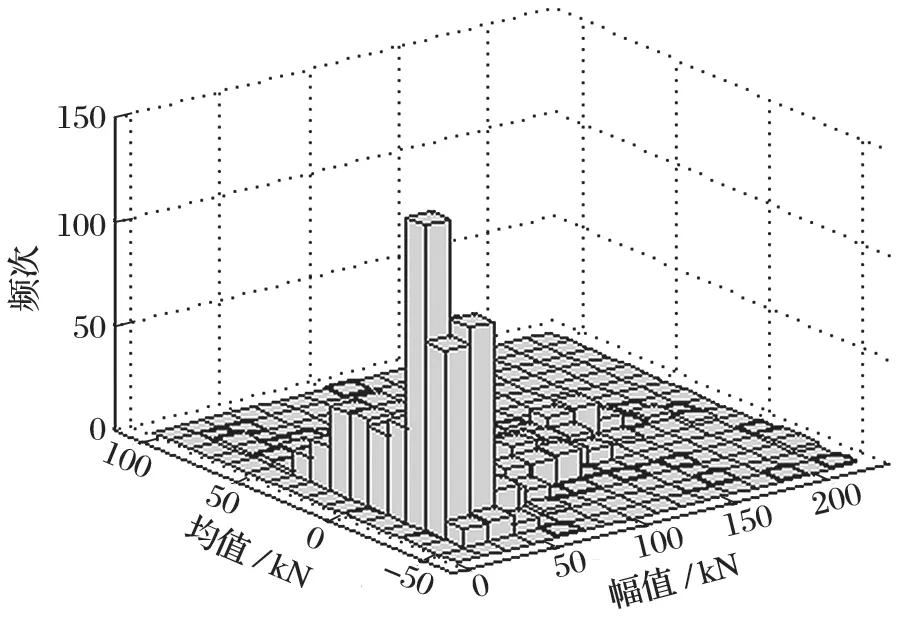
图6 雨流计数结果Fig.6 Rain flow counting results

图7 幅值-频次载荷谱Fig.7 Amplitude-frequency load spectrum
将雨流计数结果运用力的修正公式进行变换,得到幅值-频次载荷谱统计图,如图 7 所示。参考Goodman 平均应力修正公式,得到力的幅值

式中:Fa为变换前力的幅值;Fm为变换前力的均值;σb为材料的强度极限值;f为载荷传递系数,可通过有限元进行拟合得到。
由图 7 可知,力的幅值与频次的关系大致符合指数分布,故对其进行威布尔分布参数估计,并将参数估计结果代入概率密度函数及概率分布函数中进行求解,以石块介质为例,其概率密度函数曲线如图 8 所示。

图8 概率密度函数曲线Fig.8 Curve of probability density function
3.4 确定极值载荷
将4 种典型工况按照比例进行合成,以使编制的载荷谱更具代表性。200 斗样本数据数量有限,不能代表总体中出现的最大载荷,需要将载荷累积频次扩展到 106[7],以再现更加真实的现场载荷时间历程。先合成再扩展,步骤繁琐,采用一步合成法取得的效果相同[8]。一步合成法步骤如下:
(1)确定各种工况扩展后的频次

式中:Ni为各种工况扩展后的频次;αi为各种工况样本长度内的循环次数占总循环次数的比例。
(2)计算各种工况的极值载荷

式中:Xmax为各种工况的极值载荷;f(x)为各种工况的概率密度函数,在 3.3 中已求解完毕。
将上述公式进行一定转换,求解得到极值载荷Xmax,如表 2 所列。

表2 各种工况的极值载荷Tab.2 Limit load in various operation modes
将4 种工况的载荷最大值作为全工况的最大值。由表 2 可知,全工况的极值载荷为 266.31 kN。
4 试验谱的形成
求得全工况的极值载荷后,需要将连续的载荷累积频次曲线转化为阶梯型的累积频次曲线,以便于后期试验的加载。步骤如下:
(1)确定各级的加载幅值 将载荷谱分为 8级,采用不等间隔法将最大幅值分别乘以各级的比值系数:1、0.95、0.85、0.725、0.575、0.425、0.275、0.125。
(2)计算求解不同载荷循环次数对应的载荷当级数为 1 时,该载荷为第 1 级的载荷幅值;当级数为 2~7 时,该载荷取该级载荷幅值与下一级载荷幅值的均值;当级数为 8 时,该载荷为各工况幅值概率分布的形状参数。
(3)确定各级载荷循环次数 通过将式 (7)进行转化求解出各级的超值累积频率,再将该频率乘以各工况扩展后的频次,即可得到每种工况下各级载荷的超值累积频次。将 4 种工况的每一级频次相加,便可得到合成后各级的累积频次,将每一级的累积频次减去前一级的累积频次,即可得到该级的频次。至此,动臂构件一维疲劳试验载荷谱形成,如表 3 所列。

表3 动臂一维疲劳试验载荷谱Tab.3 One-dimension load spectrum from fatigue test for boom
5 结语
基于销轴传感器法编制出一套能够最大程度代表实测载荷数据,并广泛应用于同一吨位下不同机型的液压挖掘机动臂构件的疲劳试验载荷谱。该载荷谱可实现在后期加载试验过程中同时保证多个大应力点处的载荷时间历程与实测数据一致,为动臂构件疲劳寿命的预测提供更加真实有效的依据。
猜你喜欢
振动与冲击(2022年22期)2022-12-01
装备维修技术(2022年7期)2022-07-01
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
学生天地(2020年16期)2020-08-25
电子制作(2017年7期)2017-06-05
有色金属设计(2015年2期)2015-02-28
专用汽车(2014年1期)2014-12-10
筑路机械与施工机械化(2014年10期)2014-03-01
