
基于MPC导引律的AUV路径跟踪和避障控制
2020-07-31 09:49姚绪梁王晓伟
北京航空航天大学学报 2020年6期
姚绪梁,王晓伟,2,*
(1.哈尔滨工程大学 自动化学院,哈尔滨150001; 2.九江职业技术学院 机械工程学院,九江332007)
自主水下航行器(AUV)在海洋科学、水下勘探、搜索和救援、海底管道跟踪、海底电缆维护和国防等领域得到广泛的应用。路径跟踪是AUV完成各种作业任务的关键技术。为了简化路径规划和降低计算量,AUV的路径经常基于路径点进行规划,路径点之间用直线进行连接。所以,对直线路径进行跟踪是AUV一项非常基本的控制任务。但是,AUV动力学模型存在非线性、耦合性和不确定性。另外,为了节能、降低成本和提高可靠性,大部分AUV都被设计为欠驱动的形式,在某些自由度(例如:横向和垂向)缺少驱动能力,以上原因导致AUV的路径跟踪控制变得非常棘手。
针对路径跟踪的导引律问题,国内外进行了大量的研究。文献[1]应用视线法(LOS)导引律来镇定横向跟踪误差,然后应用反馈线性化方法设计了动力学控制器,实现了欠驱动水面船舶直线路径跟踪控制,但没有考虑模型的不确定性。为了改善路径跟踪的效果,文献[2]设计了一种前视距离时变的LOS导引律。文献[3]针对无人水面艇的路径跟踪控制,应用积分视线法(ILOS)导引律,并采用反馈线性化方法设计了航速和航向的动力学控制器。另外,文献[4]针对欠驱动水面船舶的路径跟踪控制设计了一种向量场(VF)导引律。针对AUV动力学模型的非线性、耦合性和不确定性,动力学控制的设计也得到了广泛的研究。目前,常用的方法有PID控制[5]、反馈线性化控制[6]、自适应控制[7]、鲁棒控制[8]、滑模控制(SMC)[9]、模糊控制[10]和神经网络控制[11]等。但是以上文献都没有考虑实际控制输入的约束问题。文献[12]考虑了输入的约束,应用模型预测控制(MPC)对LOS导引律进行优化,改善了船舶对直线路径的跟踪质量。文献[13]考虑了舵角的幅值和速度约束,应用MPC设计控制器实现了AUV的纵倾和深度控制。但是文献[12-13]都是基于名义模型,没有考虑模型的不确定性。基于路径点的直线跟踪控制虽然路径规划简单便于应用,但是路径在路径点处是不光滑的。在AUV对路径进行跟踪过程中,当路径在路径点附近进行切换时,跟踪误差会存在突变,从而使舵角很容易产生饱和。舵角频繁出现饱和不仅会降低系统的稳定性,而且还会增加AUV的阻力和能耗。文献[14]针对船舶的路径跟踪控制,考虑了舵角的饱和并应用反步法设计了控制器,但并没有从根本上改善舵角的饱和现象。另外,在路径跟踪过程中,经常需要避障,设计避障导引律[15]和对路径进行重新规划[16]是目前常用的避障方法,但是这2种方法都会增加控制器的复杂度。
本文针对欠驱动AUV三维直线路径跟踪和避障控制,基于级联控制理论设计了运动学和动力学控制器。在运动学控制器中考虑了AUV角速度存在的约束,应用MPC设计了导引律,负责产生期望的角速度信号。为了实现对期望速度信号的跟踪,在动力学控制中考虑了推进器转速和舵角的饱和,应用SMC设计了动力学控制器,可以有效地克服模型的不确定性,保证系统的鲁棒性。
1 欠驱动AUV运动模型
本文研究的欠驱动AUV在尾部配置一个推进器用来实现对纵向速度的控制、水平舵和方向舵分别实现对纵倾和艏摇的控制,在横向和垂向没有驱动力。图1为欠驱动AUV三维直线路径跟踪示意图,{B}:O-xyz和{I}:E-ξηζ分别为随体坐标系和固定坐标系;φ和p分别为横摇角和横摇角速度;Rk为接受圆半径。因为存在恢复力,AUV的横摇很小,另外路径跟踪不需要对横摇进行控制,忽略横摇后,AUV的运动学模型可以简化为如下五自由度的形式:
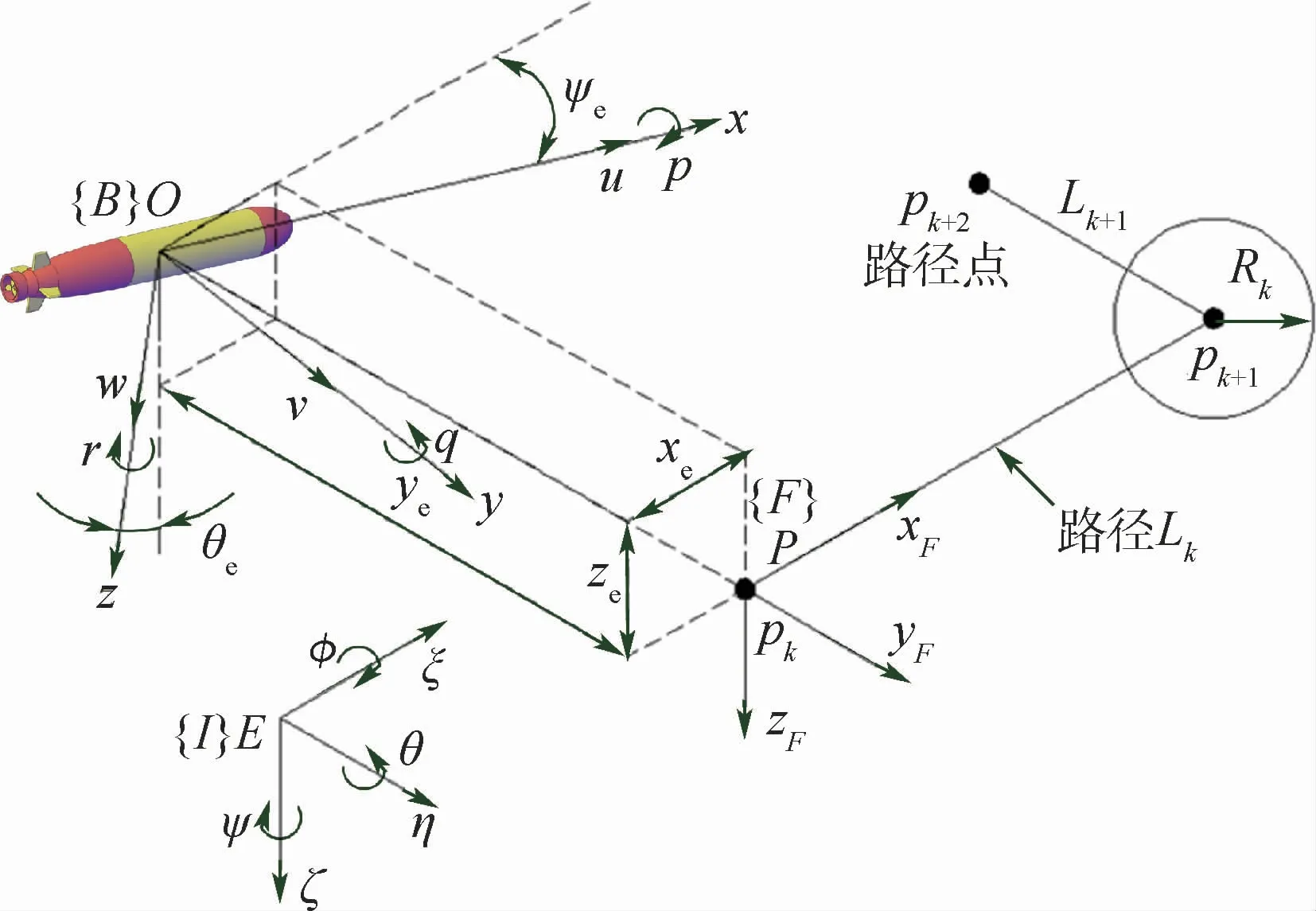
图1 欠驱动AUV三维直线路径跟踪示意图Fig.1 Schematic diagram of underactuated AUV 3D straight path following

式中:η=[ξ η ζ θ ψ]T表示AUV在固定坐标系{I}中的位置和姿态,(ξ,η,ζ)为AUV在{I}中的坐标,θ和ψ分别为纵倾角和艏摇角;v=[u v w q r]T表示AUV在随体坐标系{B}中的速度分量,u、v、w、q、r分别为纵向、横向、垂向速度和纵倾、艏摇角速度。J(η)为{B}到{I}的旋转变换矩阵,表达式为

2 三维直线路径跟踪误差模型
为了便于建立路径跟踪误差模型,以当前直线路径的起点pk为原点定义坐标系{F}:PxFyFzF。{F}坐标系的xF轴与直线路径重合并指向下一个路径点pk+1,yF轴指向右侧,zF轴指向下方。定义{F}坐标系相对于{I}坐标系的姿态为AF=[θFψF]T,其计算公式为
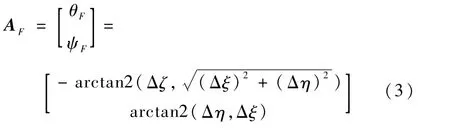
式中:Δξ=ξk+1-ξk,Δη=ηk+1-ηk,Δζ=ζk+1-ζk;(ξkηkζk),(ξk+1ηk+1ζk+1)分别为当前直线路径起点pk和终点pk+1在{I}坐标系中的坐标。定义AUV相对于{I}坐标系的姿态为AB=[θ ψ]T,则AUV相对于{F}坐标系的姿态误差计算如下:

式中:下标e表示误差。
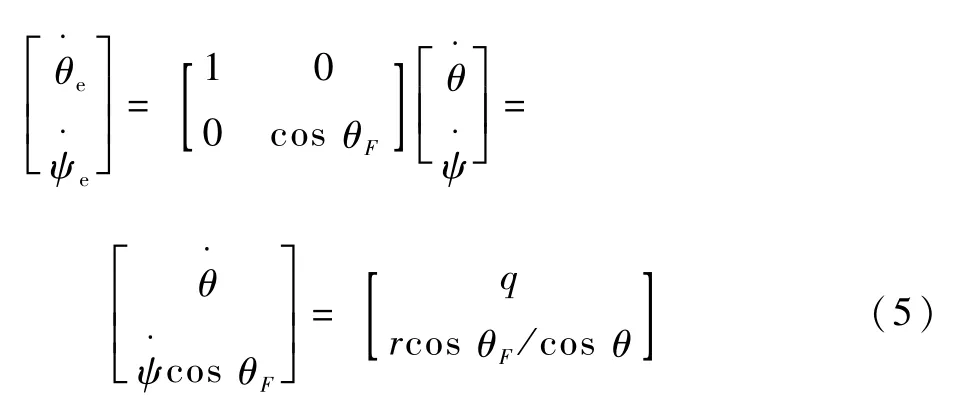
对式(4)求导可得
定义AUV在{I}坐标系中的坐标PO=[ξo,ηo,ζo]T,P在{I}坐标系中的坐标PP=[ξk,ηk,ζk]T,则AUV相对于{F}坐标系的位置误差为

对式(6)求导可得

3 三维直线路径跟踪控制器的设计
控制器分为运动学和动力学控制器两部分,首先在运动学控制器中应用MPC设计了导引律,负责产生期望的纵倾角速度qd和艏摇角速度rd。然后,应用SMC设计了动力学控制器,负责产生实际的控制信号,即推进器的转速np、水平舵角δs和方向舵角δr。
3.1 运动学控制器
因为动力学控制器对期望速度信号的响应有一定的延时,为了减小延时对控制效果的影响,添加如下低通滤波器:

式中:T1>0、T2>0为可调时间常数。
因为本文研究的欠驱动AUV在横向和垂向没有驱动力,所以v和w是非常小的,为了简化控制器设计,可对其进行忽略。另外,纵向误差xe不需要进行控制。根据式(5)、式(7)和式(8),三维直线跟踪可简化为以下系统的镇定控制问题:
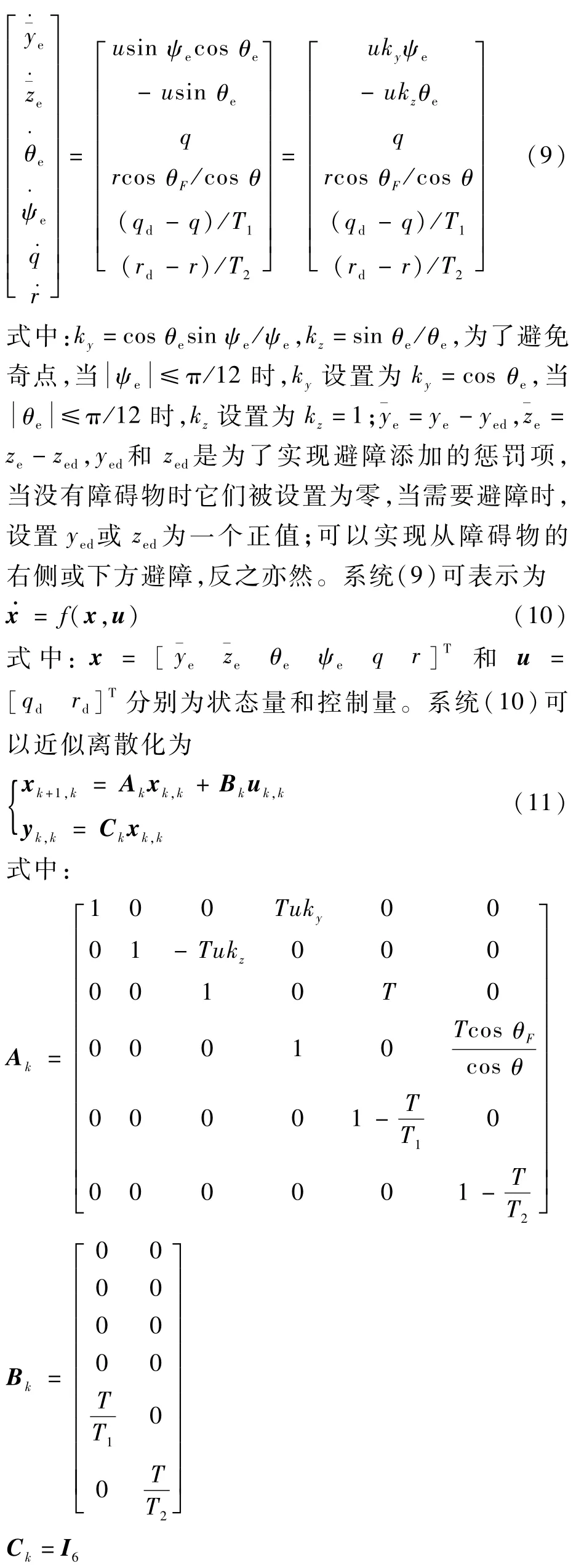
其中:T为采样周期。
根据预测模型(11),未来的状态变量可以通过式(12)进行预测:

输出量可以重新整理为如下矩阵形式:

式中:

考虑控制量的幅值存在如下约束:

通过用Uk,k参数化,可以将约束(15)整理为如下线性不等式的形式:
取上一采样时刻最优解Uk-1,k-1的后Nc-1个控制增量和当前时刻最优解Uk,k的最后一个控制增量组成一个当前时刻的可行解,该可行解及在其控制作用下的预测输出分别为

定义ΔJk,k=Jk,k-Jk-1,k-1,则

所以只要满足约束条件(19)则可以保证ΔJk,k≤0,从而保证MPC的稳定:
因为式(20)等号右边第1项为常量,所以MPC每一步的优化问题等价为求解如下约束问题:

通过对式(21)求解可以得到预测时域内的控制量Uk,k,将Uk,k的第1个值uk,k代入式(22),即可得到当前采样时刻纵倾和艏摇角速度的最优期望值为

3.2 动力学控制器
因为本文研究的欠驱动AUV在横向和垂向没有驱动力,所以其横向速度v和垂向速度w是非常小的,为了简化动力学控制器的设计,可以将动力学方程进一步简化为

式中:

因为推进器的推力和舵力是具有饱和限制的,定义输入饱和量为

为了对输入饱和进行补偿,设计如下辅助系统:

式中:
定义误差变量:
式中:ud>0为期望的航速。
定义滑模函数:

因为AUV的期望航速ud被设置为常值,所以系统可以近似为自治的,可以认为du、dq、dr有界且慢时变,其导数可以忽略。定义误差变量:

定义Lyapunov函数:

对V求导可得
设计控制律和自适应律为


式中:ρ、KT、DP、kL分别为流体密度、螺旋桨推力系数、螺旋桨直径、舵的升力系数。
4 仿真结果与分析
本文采用REMUS-100作为仿真模型,模型参数可以参考文献[17-18]。仿真采用了2种控制方法进行了对比。
1)方法1
采用本文所设计的控制器,控制器的主要设计参数为:T=0.1,T1=0.5,T2=0.5,Q11=2,Q22=2,Q33=2,Q44=2,Q55=1,Q66=1,R11=2,R22=2,Np=10,Nc=3,k1=0.1,k2=0.1,k3=0.1,k4=0.1,k5=0.1,k6=0.1,k7=0.2,k8=30,c11=1,c12=1,c13=1,c21=1,c22=1,c23=1,c31=1,c32=1,c33=1,umax=[0.15 0.2]T,umin=[-0.15 -0.2]T。期望直线路径基于表1所列路径点生成。AUV的初始位姿和速度均为零。期望航速ud=1m/s,路径切换的接受圆半径Rk=10m。在仿真中设置了一个障碍物,其半径为5m,在固定坐标系中的坐标为:PA=[ξA,ηA,ζA]T=[85,0,21]Tm。仿真中选择从右侧避障,惩罚项按式(32)进行设置:


表1 路径点Table 1 Way points m

2)方法2
运动学控制器采用了LOS导引律进行路径跟踪和避障[15],动力学控制器采用PID控制器。为了验证控制器的鲁棒性,仿真时段0~100 s水动力参数增加20%,100~250 s采用名义水动力参数,250~400 s水动力参数减小20%。

图2 路径跟踪和避障仿真结果Fig.2 Simulation results of path following and obstacle avoidance
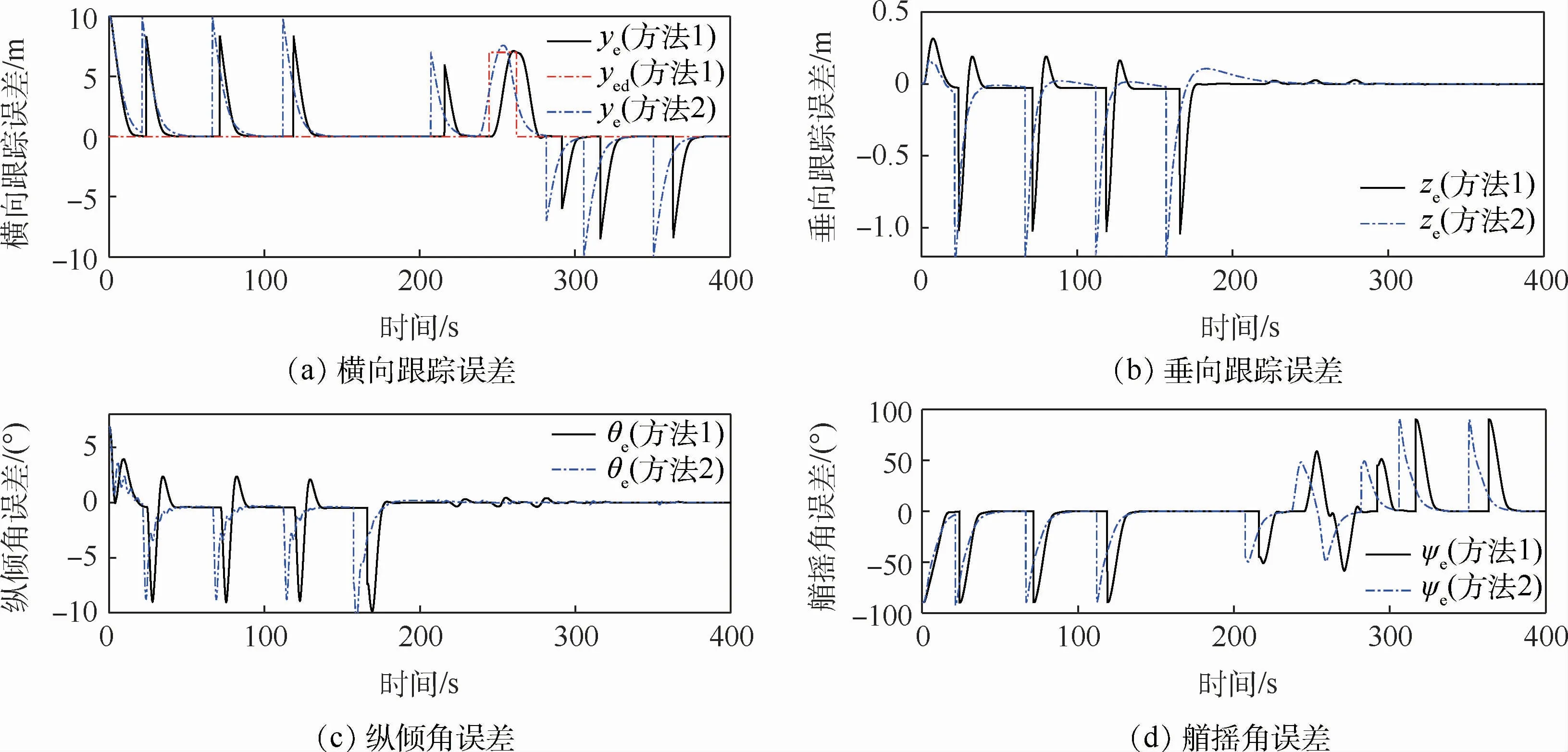
图3 路径跟踪误差曲线Fig.3 Path following error curves
图2为三维直线路径跟踪和避障示意图及其在水平面、垂直面的投影图。可以看到,2种控制方法都能实现对直线路径的跟踪和避障。但是通过对比也可以看到,在每次进行路径切换时,方法1的跟踪效果更好一些,能够更快地收敛到期望路径上,另外方法1能够更快更准确地收敛到期望的横向误差从而更好地完成避障。图3为路径跟踪误差曲线。可以看到,每一段直线路径上的位置误差和姿态误差都能收敛到零,同时可以看到方法1大约在250 s时将yed设置为了7 m,从而启动了避障,当避障完成后yed又被设置为零,最终使AUV重新收敛到期望路径上。图4为实际的控制输入曲线。可以看到,控制输入存在有规律的抖振,其主要原因是直线路径在路径点处不光滑,路径切换时跟踪误差存在跳变。仿真中根据实际情况将舵角的最大绝对值设置为25°,可以看到方法2中的舵角在路径切换时出现了饱和现象,但方法1没有出现饱和现象,整体上方法1的舵角更加平稳,这样更利于系统的稳定性和节能。图5为AUV的速度曲线。可以看到,2种控制方法都能使AUV的纵向速度收敛到期望值,但方法1的控制效果更稳定一些,同时可以看到横向和垂向速度很小而且是收敛的。方法1的纵倾角速度和艏摇角速度都在约束范围之内,从而有效地改善了舵角饱和现象。图6为方法1的鲁棒项系数和滑模函数曲线。可以看到,所有的滑模函数在路径切换时都出现了一定的抖动,但均是收敛的且趋于零,鲁棒项系数能够自动进行调整从而有效地减小鲁棒项引起的抖振。

图4 控制输入曲线Fig.4 Control input curves

图5 速度曲线Fig.5 Speed curves
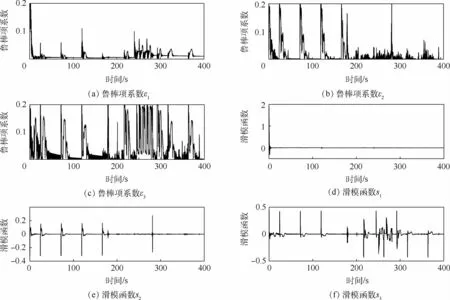
图6 鲁棒项系数和滑模函数曲线Fig.6 Robust term coefficients and sliding mode function curves
5 结 论
1)本文基于级联控制理论分别应用MPC和SMC设计了运动学和动力学控制器,从而实现了欠驱动AUV三维直线路径跟踪和避障控制。
2)在运动学控制器中设计了线性时变MPC导引律,并设计了MPC的稳定约束条件。因为运动学方程不受动力学模型不确定性的影响,所以运动学控制器采用MPC不仅能保证预测的效果,而且可以简化控制器的设计。
3)运动学控制器考虑了期望角速度的约束,可以有效地改善舵角的饱和现象,从而更利于系统的稳定性和节能。
4)动力学控制器采用SMC可以克服动力学模型的不确定性,保证系统的鲁棒性。
接下来将针对存在海浪、海流等环境干扰下的欠驱动AUV三维路径跟踪进行进一步的研究。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
导航定位学报(2022年2期)2022-04-11
内燃机与配件(2022年2期)2022-01-17
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
语数外学习·高中版中旬(2021年11期)2021-02-14
冰雪运动(2020年5期)2020-03-29
中学课程辅导·教师通讯(2018年10期)2018-09-04
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
