
基于遗传算法的重载列车驾驶策略研究
2020-07-29 13:39:02俞花珍黄友能王明主何占元孟宪洪李永亮
铁道学报 2020年7期
俞花珍,黄友能,4,王明主,何占元,孟宪洪,李永亮
(1. 北京交通大学 电子信息工程学院, 北京 100044; 2. 朔黄铁路发展有限责任公司, 河北 肃宁 062350;3. 交控科技股份有限公司,北京 100070; 4. 北京交通大学 轨道交通运行控制系统国家工程研究中心, 北京 100044)
由于重载列车大轴重、长编组且牵引质量不断提高,控制列车的作用力相应不断增大[1];列车长度的增加,制动控制命令的传递时间变长,车辆间纵向冲动大大加剧[1];重载列车运行受线路坡度变化的影响,纵向运动变化大[1],特别是在长大下坡道区段进行有关空气制动充放风操作时;在长大下坡道列车采用空气制动方式时,受列车管充风时间[2]等条件的限制。这些都对列车司机操纵的要求越来越高,不当的操作可能引发列车事故。目前得到司机指导驾驶曲线,需要通过大量现场试验,而且给出的是特定场景下的司机驾驶曲线,当场景变化时,司机的驾驶水平决定了重载列车运行的品质。因此,研究一种生成驾驶策略的智能算法具有十分重要的意义。
在重载列车操控及驾驶策略生成方面,国内外学者纷纷展开了相关的研究。Lin等[3]提出一种优化重载列车性能,包括安全操纵、服务质量和能耗的最佳操纵方法。Zhuan等[4]首次提出并解决了具有测量反馈的非线性系统的输出调节问题,并将其应用在重载列车控制中。Mcclanachan等[5]综述了客运、货运、长途重载列车所采用的列车控制优化方法,以及确定了最适合于重载列车控制的优化方法:遗传算法和模糊逻辑。陆小红等[6]采用模糊控制对重载推荐曲线进行智能化跟踪,并结合预测控制给出合理的牵引/再生操控、空气制动操控和过分相操控提示。李会超等[7]提出了一种模糊预测再优化的列车控制算法,对操纵队列以安全节能为目标进行优化得到了全局最优解,并用牵引计算软件进行了仿真验证,但没有对列车模型进行实时调整。Zhang等[8]采用基于BP神经网络的模型预测控制(MPC)法求解重载列车的最优运行问题。王新培[9]对重载列车在长大下坡道区段的循环制动问题进行了研究,提出一种局部改进算法,但仿真中对进坡速度、制动初速和缓解初速进行了设置,不能根据线路条件自适应调整。董克毓等[10]通过对重载列车在神朔段长大下坡道的实验数据进行分析,并结合大连交通大学开发的空气制动与纵向力联合仿真系统,优化重载列车在长大下坡道行驶时的循环制动次数。Huang等[11]采用BP神经网络算法对列车制动运行过程建模,通过与实际驾驶数据进行对比验证了该方法的有效性,但该方法需要大量的列车实际驾驶数据进行神经网络学习。在重载列车能耗方面,Xuan[12]提出的长大下坡道节能驾驶策略的数值计算算法和Lu等[13]提出的具有良好工程应用价值的列车能耗和再生制动能量的预测数学模型,都为后续能耗研究工作提供了参考。同时,在重载列车纵向动力学研究中,为了使仿真系统更加逼真,Wei等[14]提出了将仿真结果和现场实验结果进行比较的方法。
本文综合考虑重载线路条件、列车编组条件、操纵要求等约束以及空气制动的特点,首先建立列车运行的动力学模型;然后以仿真和指导驾驶曲线区间运行时间的差值最小为目标函数,利用遗传算法,将多个操纵约束条件转换为惩罚函数形式,进而将一个多约束问题转换为无约束问题;最后生成长大下坡道场景下的包含制动点和制动缓解点信息的列车驾驶曲线,并通过仿真和指导驾驶曲线的数据误差指标说明了该方法的合理性。文中提到的工况转换点均指制动点和制动缓解点。
1 重载列车运行模型建立
1.1 线路描述
当重载列车在长大下坡道区段运行时,仅仅用动力制动往往不足以控制列车的速度,为了不超过规定速度,需要施加空气制动,用循环制动方式进行调速。即根据《机车操作规程》第三十九条规定[15],在长大下坡道区段,列车必须采用以动力制动为主,空气制动为辅的操纵方法。本文针对此区段研究了重载列车驾驶策略,其线路条件[16]具体描述如下。
( 1 )
1.2 动力学模型建立
重载列车长度长,重量大,在线路条件复杂的情况下受力分析比较复杂,特别是当列车经过变坡点和变曲率点时。本研究在计算附加阻力时考虑了列车长度,但未考虑车辆间的相互作用力,因此整个列车在运行过程中的受力情况包括:机车牵引力、制动力(电制动和空气制动)、基本阻力和附加阻力。列车的实际运行状态是由共同作用于列车的作用力的合力所决定的[17]。
牵引工况时,作用于列车上的合力为
F=Ftr-(W0+Wj)
( 2 )
惰行工况时,作用于列车上的合力为
F=-(W0+Wj)
( 3 )
制动工况时,作用于列车上的合力为
F=-(Bk+Bd+W0+Wj)
( 4 )
式中:F为合力;Ftr为机车牵引力;W0、Wj分别为基本阻力和附加阻力;Bk、Bd分别为空气制动力和电制动力。
(1) 机车牵引力:指司机可以控制的由动力传动装置引起的与列车运行方向相同的外力。牵引力与牵引电流成正比,而牵引电流的大小与列车运行速度等相关[17]。对于在特定级位下的某一类型机车,随着列车运行速度的变化,机车牵引力也相应变化,根据相应的牵引特性曲线,即可得到对应速度下的牵引力大小。
Ftr=f1(v)
( 5 )
(2) 制动力:指由制动装置引起的与列车运行方向相反,并可根据需要调节的外力[17]。
特定级位下的电制动力大小与速度密切相关,可以由动力制动曲线较好地反映。
Bd=f2(v)
( 6 )
空气制动指通过空气制动机将闸瓦压紧车轮踏面产生摩擦从而形成制动力[18],单位空气制动力的计算式[17]为
( 7 )
式中:∑Kh为全列车换算闸瓦压力的总和,kN;φh为换算摩擦系数;P为机车质量,t;G为车辆质量,t;b为列车单位空气制动力,紧急制动时b=1 000φhϑh,常用制动时bc=βcb=1 000φhϑhβc。其中,βc为常用制动系数;ϑh为换算制动率
本研究中用到的参数取值情况为:βc取0.19;ϑh按照使用高摩闸瓦的货物列车且列车管压力为600 kPa取0.2;φh按照高摩闸瓦取为
( 8 )
(3) 单位基本阻力:列车在运行过程中任何情况下都存在的阻力,可以表示为v的下述形式[17]。
w0=a1+a2·v+a3·v2
( 9 )
式中:w0为单位基本阻力,N/kN;a1、a2、a3与具体的机车、车辆类型相关。
(4) 单位加算附加阻力:基于简化后的列车模型,假设各个车辆间无相对运动,则列车的长度是固定不变的,在每个运行步长,计算当前位置列车长度范围内的平均附加阻力,即列车所在位置的加算坡道阻力[17]为
(10)
式中:l为列车长度;ii为列车长度范围内的第i步长的坡度千分数;li为列车长度范围内的第i步长的坡道长度;lqi为列车长度范围内的第i步长的曲线长度;Ri为列车长度范围内的第i步长的曲线半径;wsi为列车长度范围内的第i步长的单位隧道阻力;lsi为列车长度范围内的第i步长的隧道长度。
基于以上分析,为了定量分析列车运行过程中的状态,由动能定理推导得出列车运行时分、距离方程为[19]
(11)
2 重载列车驾驶策略算法研究
2.1 优化模型的建立
遗传算法可以表示为[20]
SGA=(C,E,P0,M,Φ,Γ,ψ,Τ)
(12)
式中:C为个体的编码方法;E为个体适应度函数;P0为初始种群;M为种群大小;Φ为选择算子;Γ为交叉算子;ψ为变异算子;Τ为算法终止条件。
根据文献[21]可知,进化代数、收敛时间和全局搜索能力是评估遗传算法性能的重要指标,当种群规模增大时,进化代数降低,全局搜索能力增强,收敛时间先下降后增加。文中驾驶策略的研究重点在于求解出最优的制动点和制动缓解点,保证列车的安全运行,因此对算法全局搜索能力的要求比较高。考虑到单个种群的遗传算法存在易陷入局部收敛而出现早熟的缺点[22],本文主要是在上述遗传算法的基础上,通过增大种群规模,来增大群体的多样性,在一定程度上避免了单种群进化过程中出现的过早收敛现象。
本文以区间运行时间的差值最小建立优化模型,具体目标函数的表达式为
(13)
Tj的计算过程具体如下:
Step2假设有K个工况转换点,它们的位置分别为nisj(0≤ni≤J,ni∈R)(i=1,2,…,K),则第i个工况转换点到第i+1个工况转换点间对应的长度为(ni+1-ni)sj。
Step3以每一个sj=L的小区段为基本单位进行计算,当列车运行至该区段末端时,判断列车运行所处的工况区段,然后进行运行方程的计算
(14)
式中:a(i,j)为第j个小区段的加速度;c(i,j)为j个小区段对应的单位合力(计算见1.2节);γ为回转质量系数;v(i,j)和v(i,j-1)分别为j个小区段对应的末速度和初速度;tj则为第j个小区段的运行时间。
2.2 算法实现流程
驾驶策略算法流程见图1。
从图1中可以看出,本文中的驾驶策略算法可分为以下步骤进行设计:
Step1初始化仿真参数、列车参数和线路参数,随机产生初始种群。每个个体的编码对应一种驾驶策略,根据重载列车线路运行特点,文中在已知工况转换点个数和具体工况的前提下,对各个工况转换点对应的位置信息进行实数编码,编码信息见表1。
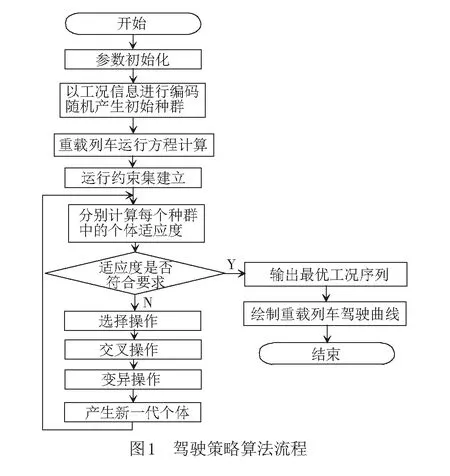
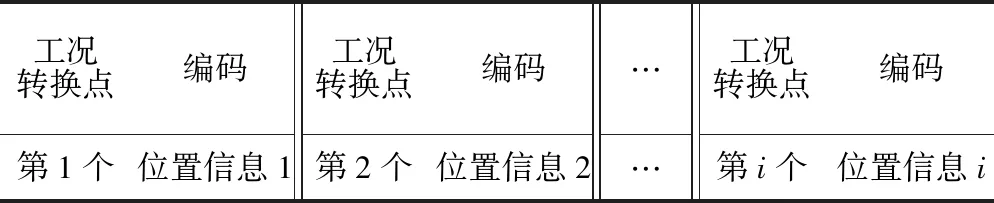
表1 列车工况转换点编码信息
Step2根据1.2节中建立的动力学模型,进行列车运行方程计算。
Step3约束集建立模块,重载列车运行过程中的约束为
(15)
式中:ri、ri+1为前后两次制动减压量;tz为列车缓解后增速运行时间;tc为副风缸充风时间。
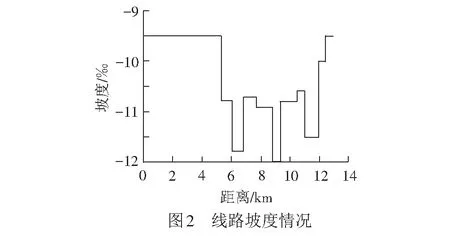
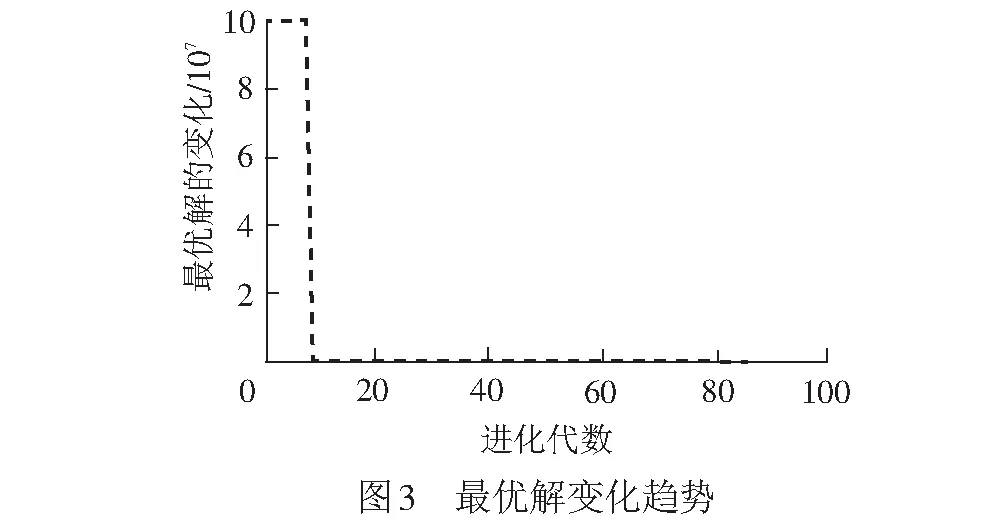
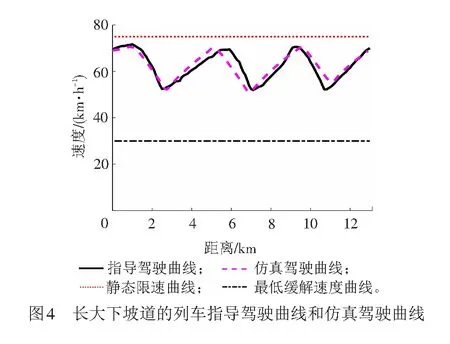
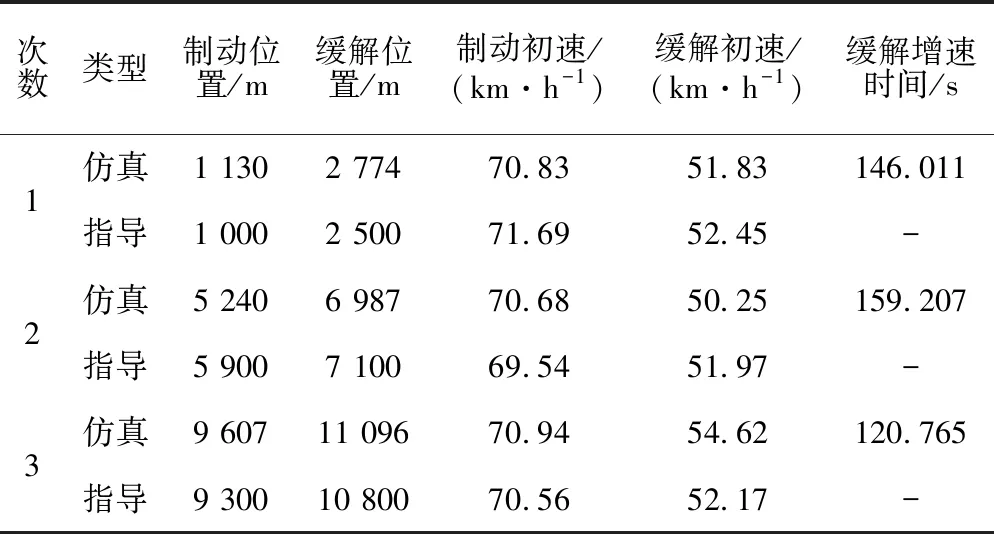
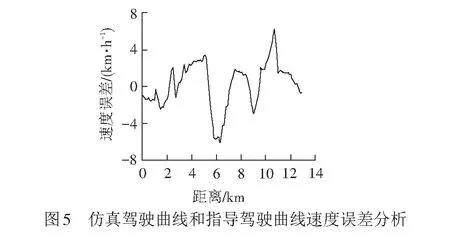
式(15)描述的条件:在长大下坡道,空气循环制动速度低于30 km/h时,不进行充风缓解动作,直至停车[15];考虑空气制动缓解过程中的制动缸排风时间,tc+tk Step4适应度计算模块,主要是对部分约束条件做了处理,以惩罚函数形式对已知的适应度函数进行调整。 (1) 考虑到行车安全问题,重载列车必须低于限速运行。文中将限速约束以惩罚函数形式作为种群进化过程中的“适者生存”的准则之一,即 (16) (17) 式中:n为速度改变点的个数;Kv为整个运行区间超速适应度;Kvi为每个速度改变点是否超速;vi为实时运行速度;vlim为实时限速。 (2) 为保证重载列车的安全运行,缓解过程的缓解增速时间应大于或等于规定的副风缸充风时间。文中将充风时间约束以惩罚函数形式作为种群进化过程中的“适者生存”的另一准则,即 (18) (19) 式中:n为缓解过程的个数;Kt为整个运行区间充风时间适应度;Kti为每个缓解过程是否满足规定充风时间要求;ti为每个缓解过程列车实际缓解增速时间;tc为副风缸充风时间。 综上所述,总体适应度值则为 minFit=Ts+αKt+βKv (20) 式中:α为对充风时间约束的惩罚系数;β为对限速约束的惩罚系数;二者可根据具体问题精度要求来设置大小。文中的目标函数为求解差值最小的运行时间,因此α和β的取值足够大,不满足条件的解被算法淘汰的可能就越大,文中均取108。即本文总体目标为在保证满足各项约束的情况下,使得区间仿真运行时间和区间指导运行时间的差值最小。 Step5判断计算出来的个体适应度是否符合要求,若符合即找到了最优个体,输出最优的工况转换序列;若不符合则进行下面Step6,即遗传算子模块,产生新一代个体,返回上述Step4,直到个体适应度符合要求,输出最优的工况转换序列。 Step6遗传算子模块,包括选择算子、交叉算子和变异算子。 Step7绘制使得工况转换点最优的重载列车驾驶曲线。 为了验证上述章节提到的遗传算法的有效性,本文选取朔黄铁路某一站间的数据,用MATLAB软件进行仿真,得到重载列车在长大下坡道线路的驾驶策略。其中,重载列车编组方式为1+1,机车型号为SS4B型+SS4B型,车辆型号为C70,见表2。该区间是总长S=12 947 m,平均坡度i= -10.3‰的下坡道,且线路限速为75 km/h,具体线路情况见图2。 表2 列车编组参数 根据上述列车编组数据和线路数据,在满足安全及操纵要求等约束前提下,以指导驾驶曲线区间运行时间和仿真驾驶曲线区间运行时间的差值最小为目标,通过对列车运行过程进行动力学计算,利用遗传算法不断优化工况转换点信息,最后的优化过程见图3,对应的仿真结果见图4。 图3表明,算法在第9代左右收敛,最优解几乎达到稳定,即算法在此时得到了一组最优的制动点和制动缓解点。 对图4进行数据分析,得到表3所示的工况转换点信息。 表3 重载列车长大下坡道运行工况转换点信息 由图4及表3可知:最终仿真得到的制动点和制动缓解点在位置和速度两方面都和指导驾驶曲线有着相近值,即算法仿真得到的驾驶曲线满足安全及操纵约束。为进一步说明算法的有效性,评价指标见表4,驾驶曲线速度误差见图5。 表4 误差评价指标结果 由表4可见:(1)完整驾驶曲线速度的均方根误差以及速度误差的期望和方差都很小;(2)工况转换点处速度的均方根误差以及速度误差的期望和方差都很小。 分析图5得知,仿真驾驶曲线和指导驾驶曲线速度差值的最大值近似为6.2 km/h。 (1) 本文通过分析重载列车在长大下坡道循环制动时的最优工况(制动和制动缓解)转换问题,设置合适的仿真参数,在满足操纵要求等各项约束的情况下,利用多种群遗传算法全局搜索能力强的特点,提出了一种基于遗传算法的驾驶策略生成方法。 (2) 以朔黄铁路一段实际线路为基础数据进行仿真,输出工况转换点信息,得到列车驾驶曲线。 (3) 仿真驾驶曲线与指导驾驶曲线相比,两者速度的均方根误差、速度误差的期望和方差分别为2.594 8、-1.938 9 km/h和2.996 2 (km/h)2;两者工况转换点处速度的均方根误差、速度误差的期望和方差分别为1.386 2、0.128 33 km/h和2.286 (km/h)2。进一步表明,本文仿真得到的驾驶策略是可行的。3 仿真结果及分析


4 结论
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11 20:55:46
铁道通信信号(2020年1期)2020-09-21 08:55:16
中国交通信息化(2019年9期)2019-11-16 09:22:38
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
中国交通信息化(2017年6期)2017-06-06 07:18:25
小学生导刊(2017年14期)2017-05-17 05:43:53
统计与决策(2017年2期)2017-03-20 15:25:24
铁道通信信号(2016年8期)2016-06-01 12:10:21
智能系统学报(2015年4期)2015-12-27 09:38:39
