
基于CNN-GRU模型的道岔故障诊断算法研究
2020-07-30 09:34:36杨菊花于苡健陈光武司涌波邢东峰
铁道学报 2020年7期
杨菊花,于苡健,陈光武,司涌波,邢东峰
(1. 兰州交通大学 交通运输学院,甘肃 兰州 730070; 2. 兰州交通大学 自动控制研究所, 甘肃 兰州 730070;3. 甘肃省高原交通信息工程及控制重点实验室, 甘肃 兰州 730070)
随着中国铁路的快速发展,对铁路信号设备的运营维护也提出了更高要求。大数据分析、机器学习和人工智能技术也将逐渐应用在铁路信号系统中。道岔是铁路信号系统中的基础设备之一,通过转辙机完成列车不同进路之间的转换,是保障列车安全运行的重要节点。在铁路信号设备中,道岔是出现故障较高的设备,根据铁路用户的统计,信号设备发生的故障中,道岔故障约占信号故障总数的39%。基于状态的维护(Condition Based Maintenance,CBM)在机械故障诊断领域应用广泛[1-3]。本文将在道岔故障诊断中应用CBM技术,通过信号集中监测系统掌握道岔实时状态,应用人工智能技术,实现道岔故障类型定位,以改变现有的铁路现场维护方式,提高维护人员故障处理效率。
目前,国内外学者针对道岔故障进行了许多研究,在应用方法上也是各具特色。文献[4]通过人工对S700K转辙机的动作电流曲线进行故障特征提取,建立故障特征矩阵,最后作为BP神经网络的输入,进行故障识别。文献[5]通过对ZD6转辙机的电流曲线进行特征提取,最后使用BP神经网络实现道岔的故障诊断。文献[6]通过信号集中监测系统中记录的故障文本信息,进行特征提取,建立故障文本数据库。文献[7]通过增加道岔设备的中间故障状态,将道岔状态细分,在功率曲线的时域和值域提取故障特征,建立隐马尔科夫模型实现道岔故障诊断。另外还有应用Bayesian Network、SVM、灰关联和专家系统等方法进行道岔故障诊断的研究[8-13]。
以上研究主要是针对电流曲线或功率曲线进行特征提取。然而,道岔动作电流曲线可以反映道岔转换时的电气特性、时间特性和机械特性,可以发现道岔动作过程的不良现象;道岔的动作功率曲线更能反映道岔在动作过程的阻力情况和机械性能。所以,本文提出将道岔的动作电流曲线和功率曲线结合起来,进行特征提取。先通过哈尔小波变换,建立特征矩阵,再通过卷积神经网络(CNN)自动进行特征提取,最后应用GRU对道岔进行故障诊断。
1 道岔采集原理和动作曲线分析
1.1 道岔采集原理
在信号集中监测系统中,交流转辙机的监测通过道岔采集单元实现。监测内容包括电流、电压、道岔一启动继电器(1DQJ)状态、定位反位表示状态[14]等。三相交流转辙机的采集原理见图1。
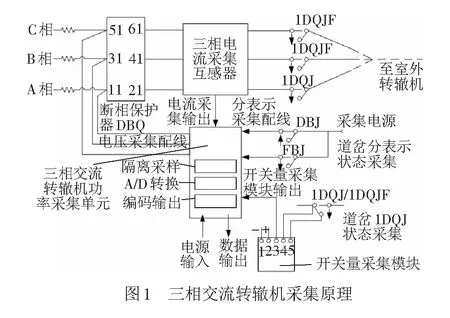
采集单元放置在组合架附近,通常一个采集单元采集一组转辙机的三相电流、三相电压、1DQJ和定位反位表示开关量。而只有在道岔转动时,1DQJ吸起,采集点与外线接通,进行数据采集。
电流采集点位于断相保护器(DBQ)输出与1DQJ之间;电压采集点在DBQ前级端子11、31、51点上;1DQJ采集点接入1DQJ继电器的空接点上;道岔定位和反位表示的采集点分别为定表继电器(DBJ)和反表继电器(FBJ)上的空接点。
1DQJ动作时,产生开关量的变化,同时启动互感器采集电机动作时的电流和电压值,每40 ms计算一次有功功率,并记录下来。同时电流和电压的实时值、1DQJ、DBJ和FBJ的状态将通过通信总线传输给站机进行显示处理。
1.2 道岔动作曲线分析
本文以S700K型转辙机为研究对象,其道岔在转换过程中正常动作的电流和功率曲线见图2。
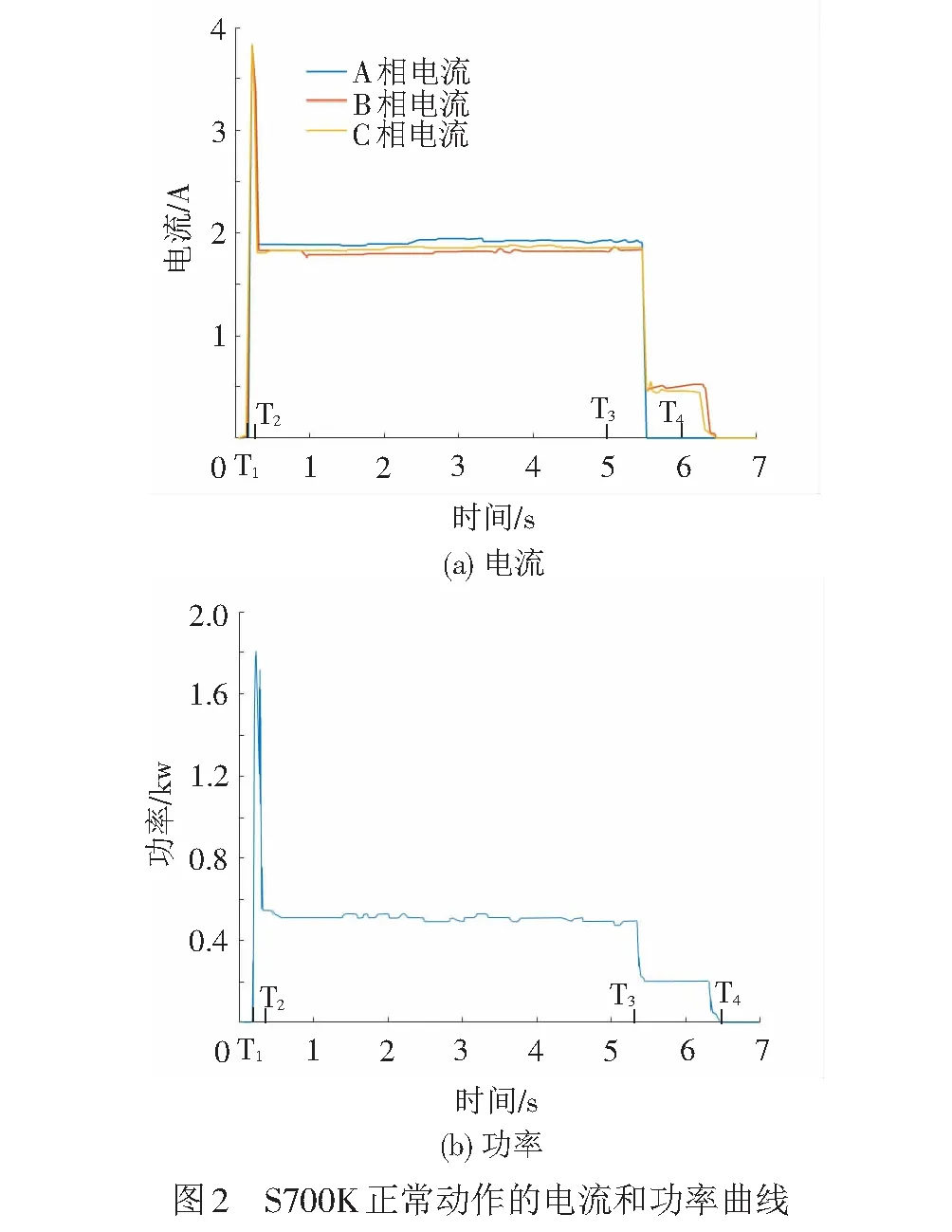
S700K交流转辙机的动作过程主要有以下5个阶段[15]。
0—T1阶段:1DQJ吸起,道岔动作曲线开始记录。
T1—T2阶段:2DQJ转极,动作电流曲线出现一个尖峰,说明道岔启动电路接通,道岔动作开始。
T2—T3阶段:此阶段为道岔动作过程,正常情况下其电流曲线应平滑,动作电流大小应与参考曲线大体相同。
T3—T4阶段:道岔转换完毕,自动开闭器节点转换,同时断开启动电路,表示电路接通,DBQ无电流通过使BHJ落下,但是1DQJ具有缓放功能,电路切断后会进入缓放状态,在缓放时,启动电路仍有两相电流存在。
T4时间点:1DQJ落下,停止记录道岔动作曲线。
1.3 道岔常见故障现象及原因
S700K型转辙机单动道岔常见故障见表1。
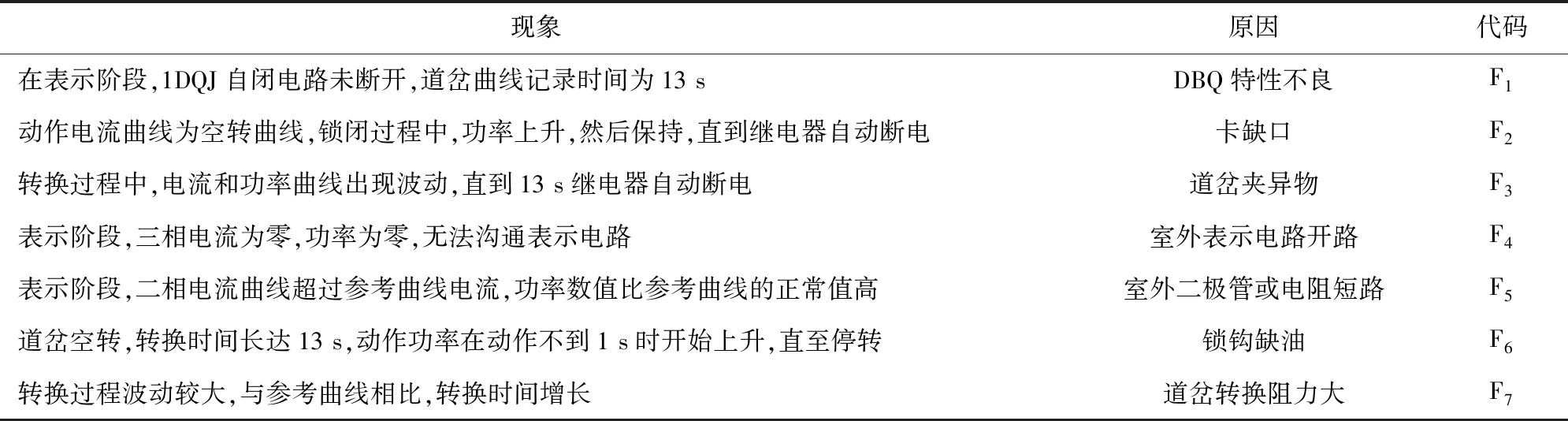
表1 S700K道岔常见故障现象和原因
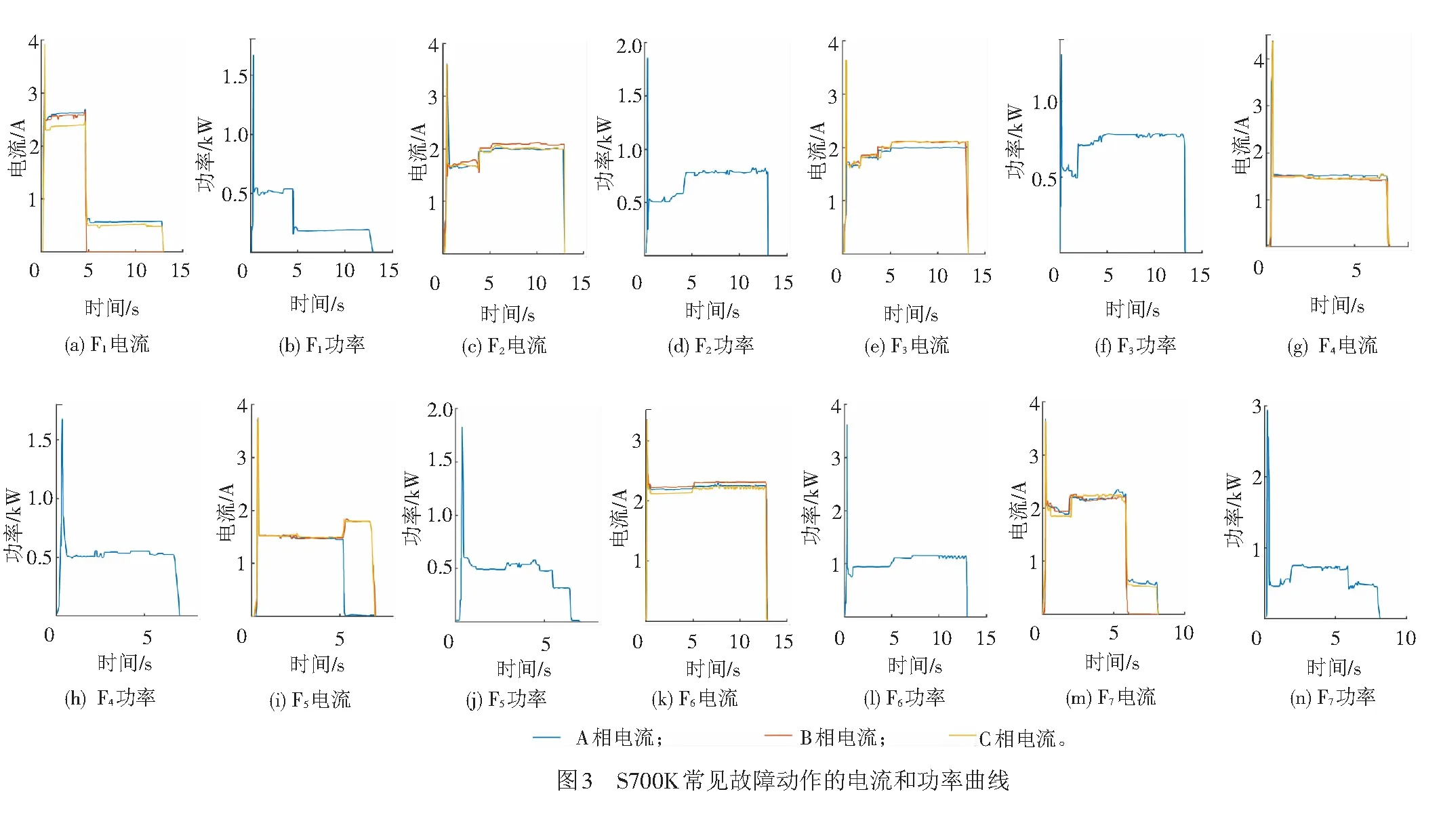
常见故障的三相电流和功率曲线见图3。
根据铁路运营用户的统计,道岔出现的故障中,卡缺口和道岔夹异物约占40%,是道岔故障中出现次数最多的;道岔转换阻力大和锁钩缺油两种故障大约占20%;而其他故障则出现频率较低。
2 基于GRU的道岔故障诊断算法
2.1 基于GRU的道岔故障诊断算法结构
道岔故障诊断的算法结构见图4。
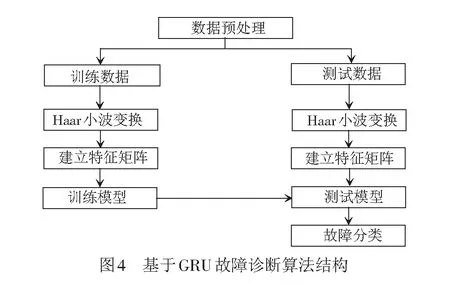
首先数据预处理,从信号集中监测系统中得到道岔的电流和功率数据,分为训练数据和测试数据,分别经过哈尔小波变换,将变换后的数据与原始数据结合,建立特征矩阵,作为CNN-GRU模型的输入。然后在模型中,经过CNN卷积层的自动提取特征,把高维数据矩阵自动降维,得到低维矩阵,作为GRU网络层的输入,得到训练后的模型,再用测试数据测试模型准确率,实现道岔故障诊断。
2.2 电流和功率数据哈尔小波变换
对数据进行特征提取前,先对电流和功率数据进行哈尔小波变换。对道岔故障诊断的特征提取,常见的是在动作电流或功率的各个动作阶段进行特征提取,这样会忽略在动作曲线上各数据点之间的信息,而哈尔小波变换可以提取到相邻数据点间的信息。
哈尔基函数是由一组常值分段函数组成的函数集,常用于图像压缩,可以将图像以少于原始图像像素点进行保存,而不失去图像原始信息[16-17]。在经过哈尔小波变换后,得到相邻数据点之间的信息,作为道岔故障诊断的特征参数。
哈尔小波的小波函数表示为
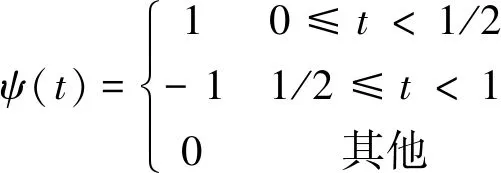
( 1 )
对应的尺度函数为
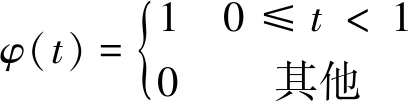
( 2 )
小波变换的基本思想是用一组小波函数或者基函数表示一个函数或者信号。将三相电流和功率曲线中的数据点抽取成一维矩阵,分别计算各自的哈尔小波变换系数
( 3 )
( 4 )
( 5 )
( 6 )
式中:IAi、IBi、ICi为三相电流曲线上数据点;Pi为功率曲线上的数据点。
哈尔小波变换系数求取如下:
(1) 求平均值,计算相邻数据对的平均值,得到短的矩阵,新的矩阵长度是原来的1/2。
(2) 求差值,经过求平均值,矩阵已经丢失部分信息,为还原原始矩阵,需要存储矩阵的细节信息,以方便找回丢失信息。所以,用数据对的第一个数据减去数据对的平均值。
将这些平均值和差值存储下来,得到变换后的系数,组成新的矩阵,作为道岔故障诊断的特征参数。变换后各曲线哈尔小波变换系数矩阵为
( 7 )
( 8 )
( 9 )
(10)
式中:AIAi、AIBi、AICi和APi分别为三相电流和功率曲线上数据点经过哈尔小波变换后的平均值;而DIAi、DIBi、DICi和DPi则为哈尔小波变换后的差值。
最后组成特征候选矩阵
(11)
2.3 电流和功率数据特征提取
在经过哈尔小波变换后,得到更多的曲线信息,而这些信息中还会包含多余的细节,需要对矩阵做进一步的处理,从而得到低维矩阵而不失曲线原本信息。
多数道岔故障研究的特征提取,经过各种变换后,会由人工进行,而随着人工智能技术的发展,可以采用神经网络方法自动完成特征提取工作。
卷积神经网络是一种更适合图像和语音识别的神经网络结构,可以出色地完成特征提取工作,而且训练简单[18]。
卷积神经网络中激活函数往往选择Relu函数,它的定义为
f(x)=max(0,x)
(12)
Relu函数相比sigmoid函数,计算速度快,意味着在训练模型时,迭代速度快,可以减轻梯度消失的问题。对比sigmoid函数,在使用反向传播算法进行神经元之间的梯度计算时,Relu函数的导数为1,不会出现梯度减小的问题。Relu函数会将小于0的映射为0,减少神经元之间的依赖,使网络变稀疏,避免过拟合。所以在模型中使用Relu函数可以训练更深,速度更快,并且能够得到更稀疏的网络模型。
若干个卷积层和池化层是一个卷积神经网络的主要部分。在卷积层,卷积运算见图5。
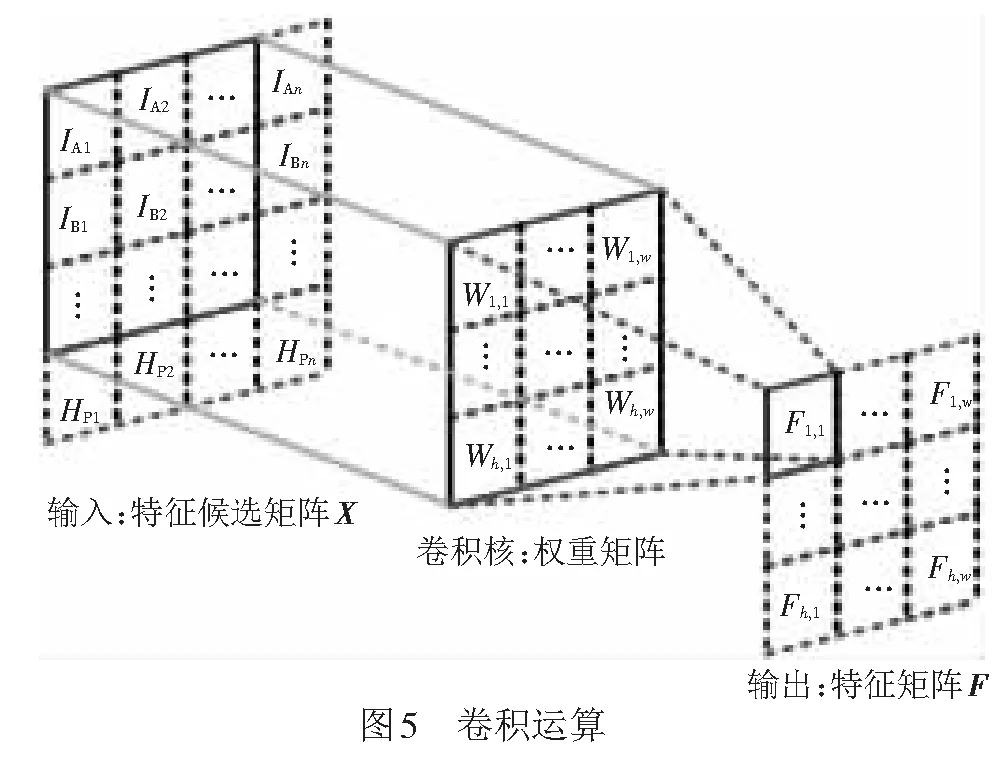
特征候选矩阵X作为输入,卷积核对输入从左到右扫描,和输入的对应元素相乘后累加,得到输出的特征矩阵第一个元素。设置步长可以控制每次滑动格数,扫描结束得到特征矩阵Fh,w。图5中Wh,w的h和w分别为卷积核权重矩阵的高度和宽度,可以在搭建模型时提前设置;输出特征矩阵的高度和宽度分别为
wF=(wX-wW+2wP)/wS+1
(13)
hF=(hX-hW+2hP)/hS+1
(14)
式中:wF为卷积后特征矩阵F的宽度;wX为特征候选矩阵X的宽度;wW为filter的宽度;wP为在原始矩阵周围补零的列数;wS为窗口横向滑动时的步幅;hF为卷积后特征矩阵F的高度;hX为特征候选矩阵的高度。hW为filter的高度;hP为在原始矩阵周围补零的行数;hS为窗口纵向滑动时的步幅。式(13)和式(14)计算原理相同。
池化层在卷积层之后,其目的是继续降低特征矩阵的维度,提高运算速度。池化运算选取MaxPooling,池化窗口对特征矩阵Fh,w从左到右扫描,设置步长控制滑动格数,同时选取池化窗口中最大值作为该位置输出,最后得到维数更小的特征矩阵Fh,w。
2.4 GRU算法
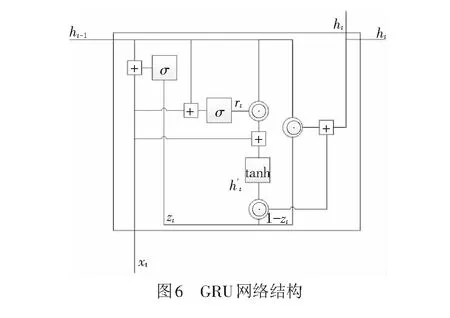
GRU是长短时记忆网络(LSTM)的一种变体。相比LSTM有3个门,GRU只有2个门,而且没有细胞状态,简化了LSTM结构[19]。所以GRU有更少的参数,相对容易训练且不容易出现过拟合问题[20-21]。GRU的网络结构见图6。图6中,“+”为向量加运算;“σ”为sigmoid函数运算;“⊙”为哈达马乘积,矩阵对应元素相乘;“tanh”为“tanh”函数运算。
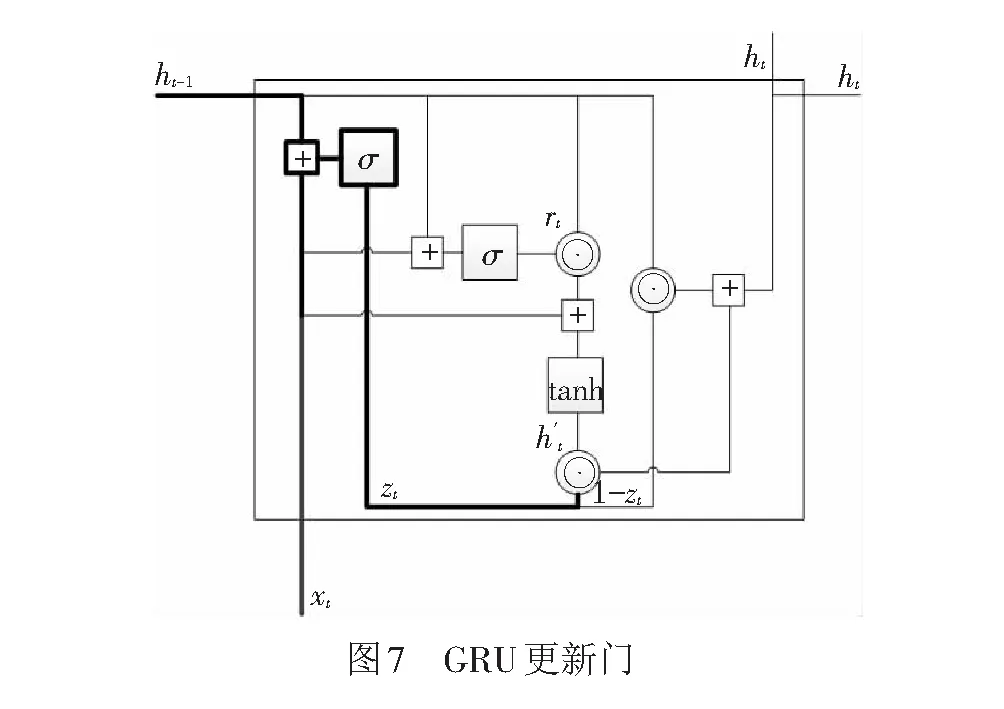
在GRU网络结构中,更新门见图7,输出为
zj=σ([Wzx]j+[Uzh(t-1)]j)
(15)
输入xt和上一时刻隐藏层h(t-1)分别与权重矩阵Wz、Uz相乘,再将结果输入sigmoid函数中,将结果控制在0~1之间。更新门主要是决定上一层隐藏状态下有多少信息传递给当前隐藏层ht。zj接近0,说明第j个信息被遗忘;接近1,说明信息继续保留。
GRU的重置门和更新门的运算操作类似,区别在于权重矩阵不同。重置门的运算结构见图8,输出为
rj=σ([Wrx]j+[Urh(t-1)]j)
(16)
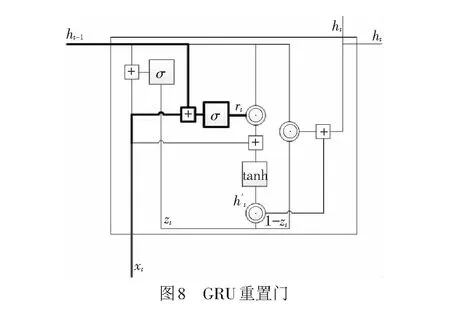
它决定上一时刻隐藏状态中的信息有多少是需要被遗忘的。更新门和重置门的作用对象是不同的,更新门决定上一时刻隐藏状态和记忆内容,而重置门决定当前的记忆内容。
确定当前记忆内容的结构见图9,输出为
(17)
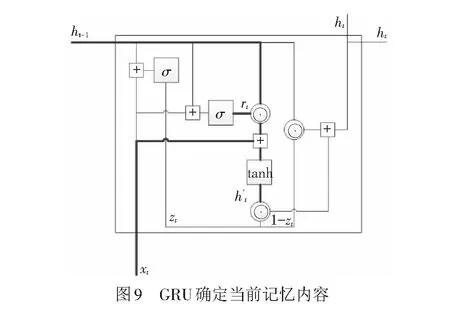
重置门rt和ht-1进行哈达马乘积,决定在当前记忆内容中要遗忘部分上一时刻隐藏状态的内容,再将部分信息经过tanh激活函数,把结果控制在-1到1之间。
上一时刻的重要信息和当前时刻输入的重要信息组成GRU当前时刻的记忆内容,这是它记录到的所有重要信息。
最后确定当前时刻隐藏层保留的信息,运算结构见图10,输出为
(18)
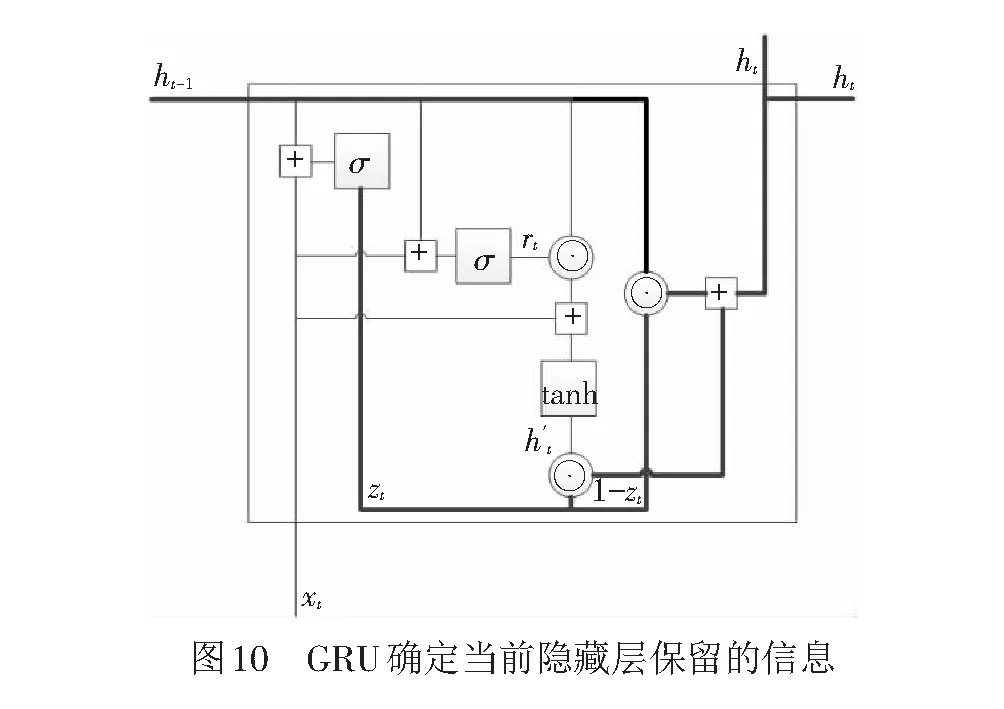
式(18)中的第一项决定了上一时刻部分信息需要保留在当前时刻隐藏单元ht,第二项(1-zj)决定需要遗忘的信息。当前记忆内容是当前时刻保留的所有信息,而当前时刻需要的信息在隐藏层中。
特征矩阵Fh,w作为GRU的输入,经过全连接层Dense,激活函数采用softmax,输出分类概率,模型经过优化和训练后,实现道岔故障诊断。
3 实验仿真分析
3.1 建立CNN-GRU模型
CNN-GRU模型使用python编译平台,在Keras框架下搭建,模型中包括二维卷积层,二维池化层,GRU层和全连接层,整体模型见图11。
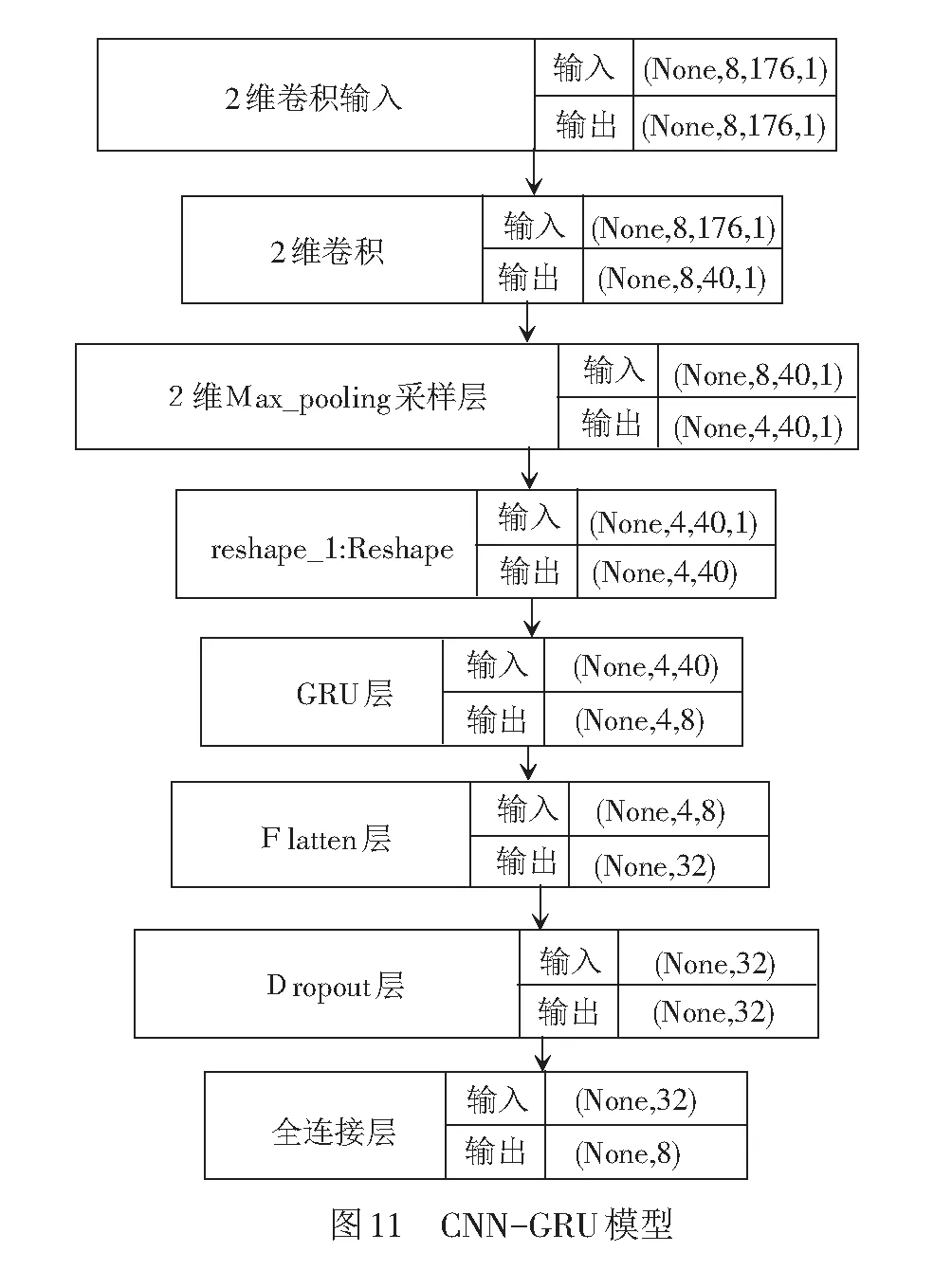
输入矩阵尺寸为8×176,176是样本曲线数据点长度,每40 ms采集一组数据,并截取7 s的曲线。如正常动作时间在6.5 s左右,在曲线数据点后补零;如果故障动作时间超过7 s,则取曲线前7 s数据。最终每个曲线采集175个数据点,三相电流和功率经过哈尔小波变换后,样本长度变成176,将原始数据第一列加上动作时间,组成8×176的特征候选矩阵。
最后输出8个节点,是正常情况和7种故障所对应的概率,判定概率最高值所对应的故障类别为故障诊断结果。
3.2 结果分析
以S700K型道岔为研究对象,正常动作情况和每种故障各取20组样本,随机排序后,取其中120组数据做训练,其余40组样本做测试,验证道岔诊断模型准确率。测试在迭代75次和100次时,不同维数的特征矩阵F,仿真结果对比见图12。
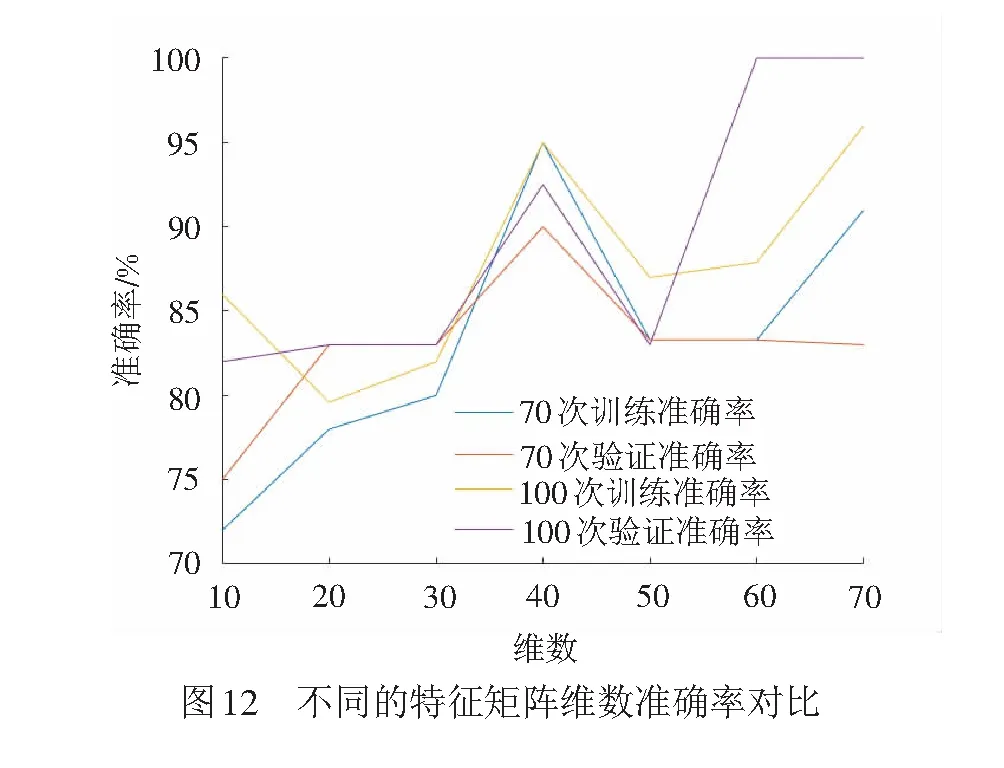
由图12可以发现,在特征矩阵F维数为40时,迭代70次和100次,有较好的训练准确率和验证准确率。所以模型选取特征矩阵F维数为40。
确定特征矩阵维数后,改变迭代次数,仿真结果准确率见图13(a),损失函数值见图13(b),训练时间见图13(c)。
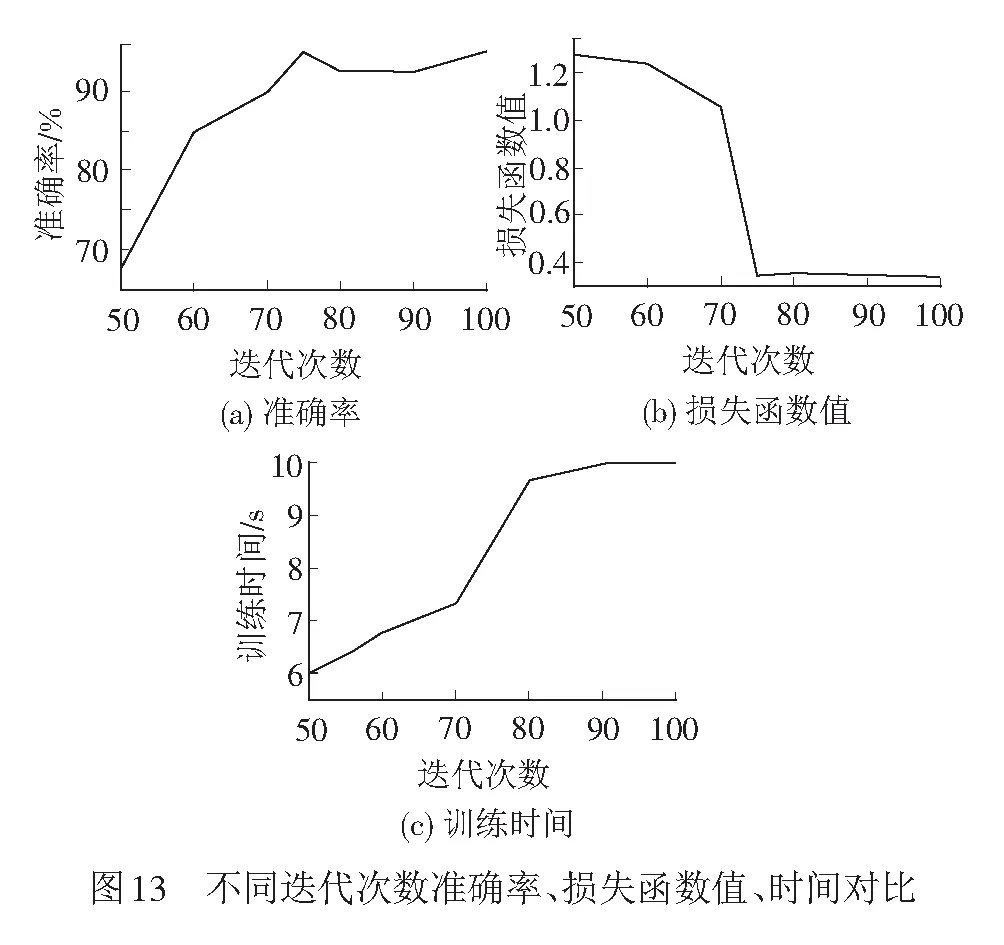
由仿真结果可以发现,综合模型准确率、损失函数值和时间,迭代75次时,模型有满意的结果,准确率为95%,损失函数值为0.344,训练时间为8.49 s,而超过75次时,模型准确率和损失函数值变化幅度小,所以选取迭代75次可以满足现场维护要求。
最终确定模型特征矩阵选取40维,迭代次数选75次。最终测试结果见图14。
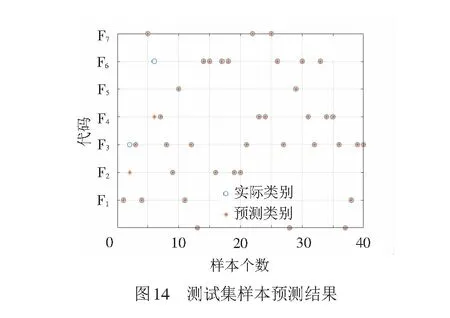
测试预测结果中:一个样本故障3(道岔夹异物)被识别为故障2(卡缺口),由故障曲线可以发现,故障2和故障3曲线整体相似,是导致模型识别错误的主要原因;另一个故障6(锁钩缺油)被识别为故障4(室外表示电路开路),虽然两种故障曲线不相似,但是经过哈尔小波变换后,曲线上数据点之间的平均值和差值整体相近,导致模型出现错误判断。
诊断准确率和训练时间分别见表2、表3。
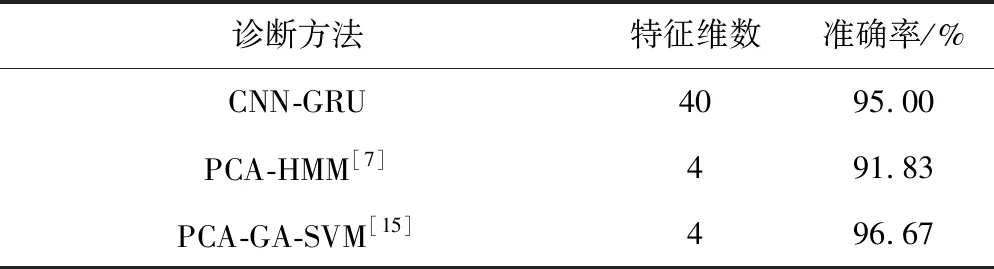
表2 诊断准确率
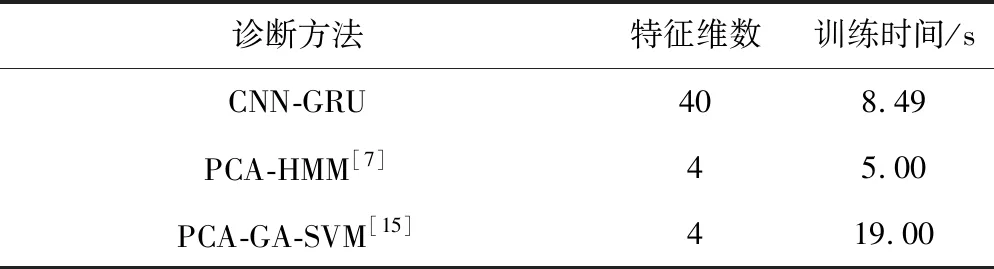
表3 训练时间
由表2和表3可知,经过与PCA-HMM和 PCA-GA-SVM方法对比,本文方法的准确率优于PCA-HMM方法的准确率,在训练时间上优于PCA-GA-SVM方法。而且CNN-GRU模型在经过调试后,可以保存为.h5文件,再次调用后,可以直接使用,不需要再次训练优化,如果无法满足要求,可以继续训练优化,重复使用率高于其他方法。
4 结束语
通过提取信号集中监测系统中的道岔电流和功率故障曲线,经过哈尔小波变换后,与原始数据组成高维的特征候选矩阵,作为CNN的输入,经过卷积网络对特征候选矩阵的自动提取,得到低维特征矩阵,再经过GRU网络的判断,输出每种故障状态的概率,实现故障诊断。通过仿真实验及对比其他方法,CNN-GRU道岔故障诊断模型准确率达95%,在训练时间上也优于其他方法,能够满足铁路现场维护需求。
猜你喜欢
小学生作文(低年级适用)(2021年3期)2021-03-25 01:11:52
铁道通信信号(2020年10期)2020-02-07 01:01:02
铁道通信信号(2019年3期)2019-04-25 03:00:40
铁道通信信号(2018年10期)2018-12-06 09:34:48
作文评点报·中考版(2018年7期)2018-02-09 18:08:42
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
电影故事(2015年29期)2015-02-27 09:02:50
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
